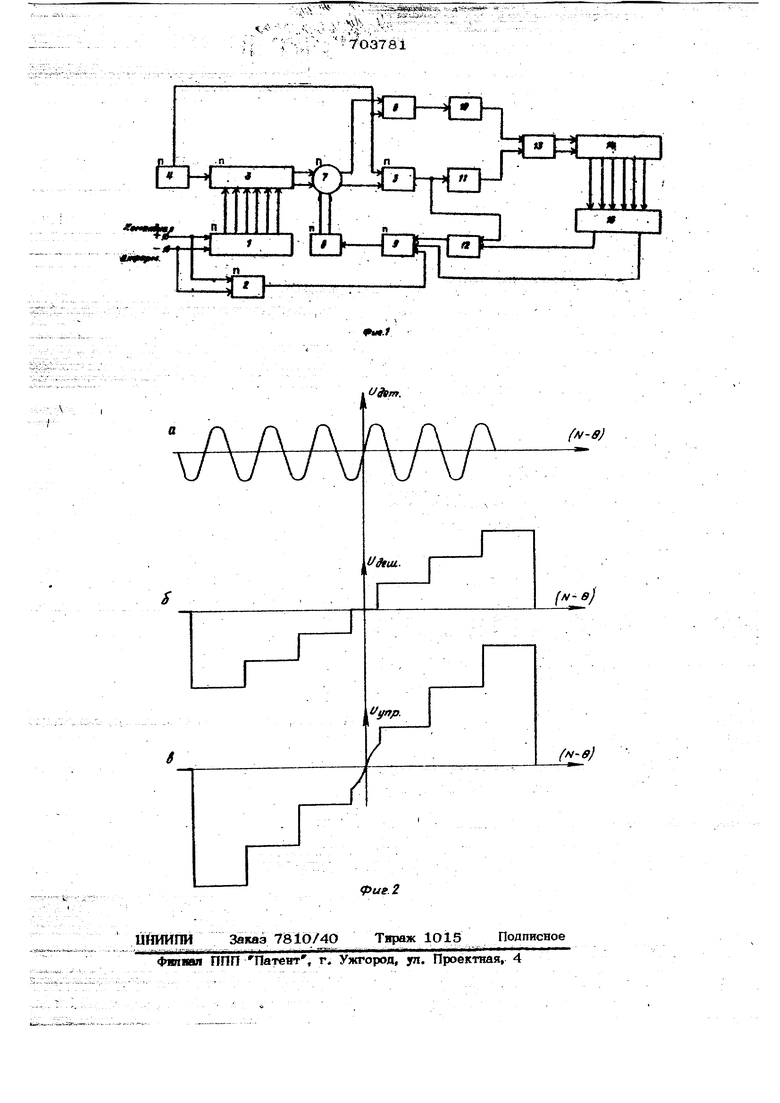
Изобретение относится к области автоматики и вычислительной техники и может найти применение при программном управлении технологическим оборудова-, нием. Устройство предназначено для автоматического управления металлорежущими станками и другим оборудованием, работающим по заранее составленной программе. Известны .устройства для программног управления, в которых используются фазовые датчики обратной связи, кинематически связанные с осью привода jjl. Допустимый диапазон отслеживаемых углов рассогласования в таких устройствах ограничен, что ухудшает их динамические характеристики. Наиболее близким по технической сущ ности является система позиционного программного управления и цифроаналого выми трансформаторными преобраз ателями|21, содержащая генератор синусоидальных колебаний, выходы которого со динены с одним из входов детектора и с входом цифроаналогового преобразователя, реверсивный счётчик командной информации, выходы всех разрядов KoiToporo соединены с цифроаналогобым преобразователем, формирователь сигнала скорости, выход которого соединен с сумматором, кинематически связанный со следящим приводом вращающийся трансформатор, входы которого подкдпочены к выходу цифроаналогового преобразователя, а один из выходов - ко второму входу детектора. Недостатком такой системы является малый допустимый перепад частоты командной информации. Это обстоятельство требует введения участков с запрограммированным разгоном и торможением, что снижает производительность оборудования. Целью изобретения является повыщение допустимого перепада частоты командной информации и сокращение времени разгона-торможения, что улучщает динамические характеристики привода. Эта цель достигается тем, что в йредяагаемую систему позиционного программного управления дополнительно введены второй детектор, два триггера Шмитта, логический блок, второй реверсивный счетчик, дешифратор и блок согласования каналов, один вход второго детектора подключен к генератору синусоидальных колебаний, а другой - к квадратурной выходной обмотке вращающегося трансформатора, выходы детекторов подключены через соответствующие триггеры Шмитта к логическому блоку, выходы которого соединены с входами второго реверсивного счетчика, выходами подключенного к дешифратору, выходы дешифратора подключены к сумматору и к одному входу блока согласования каналов, второй вход которого соединен с выходом первого детектора , а выход блока согласования каналов подключен к сумматору. На фиг, 1 представлена блок-схема устройства для уп{эавления следящим приводом, где 1 - первый реверсивный счетчик, 2 - формирователь сигнала скорости 3- цифроаналоговый преобразователь, 4- генератор синусоидальных колебаний, 5- детектор, б - детектор грубого канала, 7- вращающийся трансформатор, 8 - привод, 9 - сумматор, 10, 11 триггеры Шмитта, 12 - блок согласования отсчетов, 13 - блок логики направЛенин, 14 - второй реверсивный счетчик, 15 - дешифратор; на фиг. 2 - приведены выходные характеристики устройства для управления следящим приводом. Устройство для управления следящим приводом связано со схемой ввода программы посредством входных каналов . реверсивного счетчика 1 и формирователя сигнала скорости 2. Выходы всех разрядов реверсивного счетчика 1 соединены с цифроаналоговым преобразователем 3, а вход его подключен к генератору синусоидальных колебаний 4. Выходной сигнал генератора синусоидальных колебаний подается также на вход детектора 5 И детектора грубого канала 6. Выходы с ЦАП подключены к датчику перемещения 7, кинематически связанно1у с приводом 8. Выходной сигнал с датчика подается на вход детектора 5, а Шадраtypный выход датчика подключен к детектору грубого канала 6, выход формирователя сигнала скорхжти соединен с сумматором привода 9. Выход детектора грубого канала соедини с триггером Щмитт 10, а выход детектсфа 5 соединен с триг гером Шмитта 11 и схемой согласования отсчетов 12. Выходы триггеров Шмитта подключены к блоку логики направления 13 Выходы блока логики направления соединены с реверсивным счетчиком грубого канала 14, выходы разрядов которого соединены с дешифратором 15, управляющий выход которого подключен к схеме согласования отсчетов, а блокирующий выход - к сумматору привода. Выход схемы согласования отсчетов подключен к сумматору привода. Сущность изобретения заключается в том, что введенный дополнительно канал передачи сигнала рассогласования на следящий привод позволяет увеличить допустимую величину рассогласования. Принцип работы устройства управления следящим приводом следующий. Командная информация по :-каналам + или - поступает на вход реверсивного счетчика 1. Сигнал несущей частоты Ui SlVitJut от генератора 4 поступает на вход трансформаторного цифроаналогового преобразователя 3. Преобразовательформирует два выходных сигнала Уц несущей частоты, амплитуда которых пропорциональна соответственно синусу и, косинусу числа импульсов N командной информации, занесенных в реверсивный счетчик tJ Uj Sinuut sinN и -Uj SiniJutcosNАмплитудная модуляция сигнала несущей частоты обеспечивается подключением соответствующих отводов кодовых трансформаторов цифроаналогового преобразователя 3 к выходным шинам. Выходные сигналы цифроаналогового преобразователя 3 питают две квадратурные входные обмотки вращающегося трансформатора 7. Последний осуществляет, амплитудную модуляцию входных сигналов измеряемым положением вала вращающегося трансформатора 70 по гармоническому закону. Таким образом на выходных обмотках вращающегося трансформатора формируются два сигналаи HUfef g ej JmSi wt siii Ncose cos Nl.-sine j- U simut.siy,, -ВУходной сигнал U на квадратурной
обмотке враишющегсюя трансформатора имеет фазовый сдвиг на 1с/2 рад
Ug -U eiiiujt s-ittHsine-vcosNcos9
vn.
и 5iwa.tco9(.N-eV
n
Выходные сигналы трансформатора 7 поступают на детекторы 5 и 6, осушествляюшие выпрямление. Среднее значение, выходного напряжения детекторов связано с рассогласование.м между положением реверсивного счетчика и положением вала вращающегося трансформатора 7 синусридальной зависимостью (фиг. 2а),
При рассогласовании меньшем, чем рабочая зона детектора (+ ) рад сигнал через схему согласования отсчетов 12 и сумматор 9 управляет работой привода 8. Сигналы с детекторов через два триггера Шмитта 10 и 11 поступают на схему логики направления. 13. Последняя выделяет направление рассогласования и формирует единичные импульсы при рассогласованиях (ff/2 ; 5lC|2 i 91t/2. ... и т.д.) рад. Эти импульсы поступают на входы реверсивного счетчика 14 в зависимости от направления рассогласования. Состояние разрядов реверсивного счетчика преобразуется дешифратором 15 в управляющий сигнал (фиг.26). Выходной сигнал схемы согласования 1 отсчетов (фиг. 2в) образуется из сигналов детектора 5 и дешифратора и через сумматор управляет работой привода. Допустимая величина рассогласования определяется объемом реверсивного счетчика грубого канала и равна tXAUCn-O-t-llIZ 1 рад, где - Л объем счетчика. При рассогласовании, превышаю щем эту величину , блокирующий выход дешифратора воздействует на сумматор, уменьшая дЪ нуля сигнал управления приводом.
Использование изобретения позволяет повысить допустимый перепад частоты командной информации и сократить время разгона или торможения, что улучшает динамические характеристики устройства.
Формула изобретения
Устройство для управления следящим приводом, содержащее генератор синусоидальных колебаний, выходы которого соединены с одним из входов первого детектора и с входом цифроаналогового преобразователя, первый реверсивный t счетчик, выходы разрядов которого соеднены с цифроаналоговым преобразователем, формирователь сигнала скорости, выход которого соединен с сумматором и кинематически связанный со следящим приводом вращающийся трансформатор, входы которого подключены к выходу цифроаналогового преобразователя, а оди из выходов - ко второму входу первого детектора, отличаюшеес я тем, что, с целью улучшения пинамических -.характеристик устройства, в него введены второй детектор, два триггера Шмитта, логический блок, второй реверсивный счетчик, дешифратор и блок согласования каналов, один вход второго детектора подключен к генератору синусоидальных колебаний, а другой - к кваратурной входной обмотке вращающегося трансформатора, выходы детекторов подключены через соответствующие триггеры Щмитта к логическому блоку, выходы которого соединены с входами второго реверсивного счетчика, выходами подключенного к дешифратору, выходы дешифратора подключены к сумматору и к одному входу блока согласования; каналов, второй вход которого соединен с выходом первого детектора, а выход блока согласования каналов подключен к сумматору.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР N9 434381, кл. G05 В 19/18, 1974,
2.Авиационная промышленность. № 197О, с. 3-6, Киселев В. М, и др.Система позиционного программного управления с цифроаналоговыми трансформаторами преобразователя(прототип).
Ч
. , , r 7О3781
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухотчетный преобразователь углового перемещения в цифровой код | 1975 |
|
SU526932A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Устройство для управления следящим приводом | 1982 |
|
SU1108389A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1979 |
|
SU924736A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU732955A1 |
| Двухотсчетный преобразователь углапОВОРОТА ВАлА B КОд | 1979 |
|
SU840995A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1425832A1 |
| Двухотсчетный преобразователь углового перемещения в цифровой код | 1977 |
|
SU651389A2 |
| Преобразователь перемещения в код | 1988 |
|
SU1531221A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
(-в)
s
(N-e)
/
()
