1
Изобретение относится к электротехнике, в частности, может быть использовано в системах автоматического управления, требующих получения информации об угле поворота вала в аналоговой и цифровой форме.
Известен высокочастотный датчик угловых перемещений, содержащий диэлектрический статор с двухфазной обмоткой рамочного типа и однофазной кольцевой обмоткой, ротор, выполненный в виде пар ферромагнитных и немагнитных металлических секторов цилиндра 11.
Наиболее близким по техническому решению к предлагаемому является датчик угла поворота .вала, содержащий неподвижный статор с обмоткой, который состоит их двух подковообразных диаметрально расположенных секций, ротор,, выполненный в виде размещенного возле периметра обмотки Ш-образного ферромагнитного полукольца и, тем самым охватывающего все части обмотки 2.
К недостаткам этого датчика следует отнести невысокую точность измерения из-за невозможности получения сигнала равного нулю на концах обмотки датчика в начальном положении ротора и невозможность увеличения выходного напряжения датчика вьжие напряжения питания.
Цель изобретения - повышение точности датчика путем исключения сигнала в начальном (нулевом) положении ротора, а также увеличение выходного напряжения датчика.
Поставленная цель достигается
0 тем, что в датчик угла поворота вала, содержащий статор с обмоткой, состоящей из двух секций, первая часть которых выполнена в виде полукольца, расположена по окружности
5 паза ферромагнитного ротора в-виде полукольца, введена обмотка возбуждения, которая расположена между частями секций ферромагнитного ротора, вторая часть секций расположе0на по диаметру окружности вне паза ферромагнитного ротора, начало первой секции обмотки статора соединено с началом второй секции обмотки статора, а конец первой и конец второй
5 секций обмотки статора соединены с . выходом датчика угла поворота.
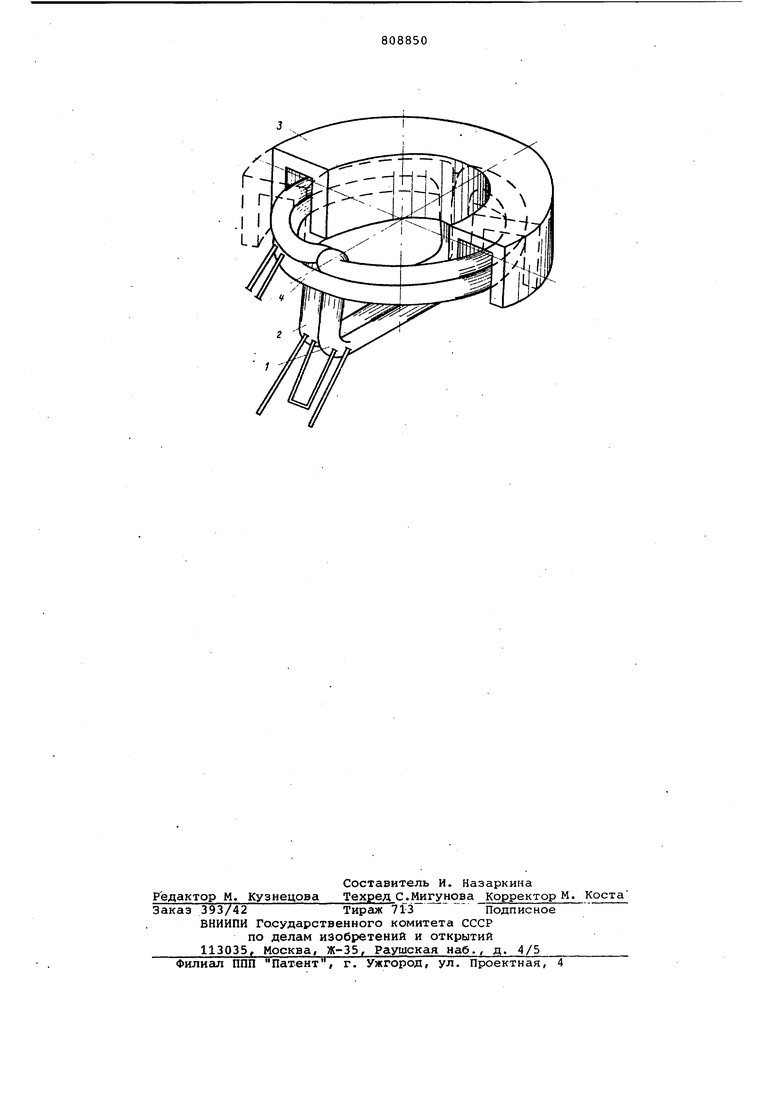
На чертеже изображена конструкция предлагаемого датчика .
Датчик угла поворота содержит не0подёижный статор с обмоткой в виде
двух диаметрально расположенных секций 1 и 2, имеющих одинаковое число витков, ротор 3 и кольцевую обмотку 4 возбуждения.
Секции 1 и 2 расположены соосно с обмоткой 4 возбуждения.
Ротор 3 выполнен в виде ферромагнитного полукольца П-образного сечения. Кольцевая обмотка 4 возбуждени и полукольца обмотки статора находяся в пазу ротора, причем эти полукольца располагаются в глубине паза, у его основания. Лобовые (оставшиеся ) части секций 1 и 2 выведены из паза под прямым углом к плоскости обмотки и проходят вдоль диаметра датчика.
Датчик работает следующим образом.
При возбуждении кольцевой обмотки 4 возбуждения однополярными импульсами в секциях 1 и 2 возникает ЭДС. При равномерном перекрытии П-о разным ротором 3 полуколец секций
1и 2, расположенных в основании паза ротора 3 под кольцевой обмоткой 4 потокосцепление, а, следовательно и наводимые ЭДС в секциях 1
и 2 одинаковы. Это положение ротора 3 является нулевым. Магнитный поток кольцевой обмотки 4 возбуждения замыкается по П образному ротору, охватывая полукольца секций 1 и 2, прчем он не связан с теми частями обмотки секций 1 и 2, лобовые части которых находятся вне ротора и npoxдят вдоль диаметра датчика. При это постоянная составляющая в секциях 1 и 2 обмотки отсутствует, что обеспечивает исключение сигнала в нулевом положении П-образного ротора 3.
При повороте ротора 3 датчика, соединенного с валом, т.е. при измерении угла поворота вала, потокосцепление, а.следовательно и ЭДС одной секции возрастает, а другой убывает. На выходе датчика появляется сигнал, пропорциональный углу поворота вала относительно нулевого положения, причем на секциях 1 и
2обмотки статора возможно получение выходного напряжения выше , чем напряжение питания кольцевой обмотки 4 за счет разности витков этих обмоток. Повышение выходного напряжения датчика способствует и расположение лобовых (оставшихся) частей секций 1 и 2 вне.ротора на расстоянии, обеспечивающим исключение влияния паразитной связи. Паразитная связь заключается в наведении в оставшихся частях секций ЭДС противоположного знака по сравнению с ЭДС
.(полезным сигналом) в полукольцах секции 1 и 2. Кольцевая обмоткэ 4 находится над полукольцами секций 1 и 2-, расположенных в рсновании паза, что исключает погрешность от осевого, радиаипного перемещения ротора 3 и торцового биения (при работе датчика) за счет неизменного магнитного потока, охватывающего эти секции. Это пвьллает точность измерения.
Указанные изменения ЭДС в обмотках от угла поворота ротора происходят по линейному закону.
Датчик обеспечивает измерение угла в диапазоне близком к с высокой точностью и практически не чувствителен к осевым и радиальным технологическим смещениям ротора. Введение обмотки возбуждения и ее расположение :1ад полукольцами секций, расположенных в глубине ротора, позволило решить вопрос о питании датчика от однополярного источника и исключении сигнала в нулевом положении ротора, а также вопрос о повышении точности датчика.
Конструкция датчика проста и технологична, что дает возможность его изготовления в условиях массово го производства.
изобретения
Формула
Датчик угла поворота вала, содержащий статор с обмоткой, состоящей из двух секций, первая часть которых выполнена в виде полукольца, первые части секций расположены по окружности в пазе ферромагнитного ротора, выполненного в виде полукольца, отличающийся тем, что, с целью повышения точности датчика, в него введена обмотка возбуждения, которая расположена соосно первым частям секций в пазе ферромагнитного ротора, вторая часть секций расположена, по диаметру окружности вне паза ферромагнитного ротора, начало первой секции обмотки статора соединено с началом второй секции обмотки статора, а конец первой и конец второй секций обмотки статора соединены с выходом датчика угла поворота.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 374648, кл. G 08 С 9/04, 01,01,70
2.Авторское свидетельство СССР № 661238, кл. G 08 С 9/04, 1977 (прототип).
X
f
| название | год | авторы | номер документа |
|---|---|---|---|
| НИЗКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОЛЬЦЕВЫМ СТАТОРОМ | 2009 |
|
RU2417506C2 |
| Устройство для бесконтактной передачи энергии | 1985 |
|
SU1302339A1 |
| Бесконтактный преобразователь угла | 1976 |
|
SU571857A1 |
| Бесконтактный преобразователь угла поворота с сосредоточенными обмотками | 1985 |
|
SU1328887A1 |
| Бесконтактный преобразователь угла поворота | 1991 |
|
SU1814160A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2480710C2 |
| Бесконтактный преобразователь угла поворота | 1989 |
|
SU1690109A1 |
| Трансформаторный датчик угла поворота | 1990 |
|
SU1768952A1 |
| ЯКОРЬ МНОГОФАЗНОГО СИНХРОННОГО ГЕНЕРАТОРА | 1991 |
|
RU2124796C1 |
| Трансформаторный датчик угла | 1988 |
|
SU1610246A1 |