(54) БЕСКОНТАКТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный преобразователь угла поворота | 1989 |
|
SU1690109A1 |
| УЛУЧШЕННЫЙ ГЕНЕРАТОР НА ПОСТОЯННОМ МАГНИТЕ | 2019 |
|
RU2716815C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2407134C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU966720A1 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
| БЕСКОНТАКТНЫЙ ТРАНСФОРМАТОРНЫЙ РЕГУЛЯТОР ОДНОФАЗНОГО НАПРЯЖЕНИЯ | 1990 |
|
RU2025809C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| Индукционный редуктосин | 1988 |
|
SU1557641A1 |
| ЭЛЕКТРОМАГНИТНЫЙ РЕДУКТОР | 2016 |
|
RU2630482C1 |
1
Изобретение относится к области автоматики и вычислительной техники и предназначено для преобразования угла поворота вала в последовательность импульсов, число которых пропорционально углу поворота.
Известны индукционные преобразователи угла поворота вала в последовательность электрических импульсов, число которых пропорционсшьно углу поворота. Известные преобразователи содержат статор и ротор, выполненные шихтованными из пластин магнитомягког материала. Ротор по внешней образующей снабжен зубцами. Статор выполнен с явно выраженными полюсдАШ. На восьм полюсах статора выполнены зубцы, аналогичные ротору. Шаг зубцов соседних полюсов смещен на 1/2 зубцового делеНИН. На двух взаимно противоположных полюсах статора (без зубцов) расположены обмотки возбуждения, соединенные между собой последовательно-согласно, на остальных полюсах статора разметщены обмотки считывания, соединенные через одну последовательно-встречно
Известны также преобразователи угла, магнитопроводы статора и ротора которых выполнены шихтован)Лми, не сущими обмотки с различными числами пар полюсов 2.
Известные преобразователи имеют низкую точность преобразования информации из-за наличия технологических погрешностей и эксцентриситета. Разрешающая способность известных преобразователей также невелика и определяется величиной зубца, которую в шихтованных магнитопроводах ие удается выполнить достаточно малой.
Кроме того, известен преобразователь угол-код, который содержит статор с обмотками возбуждения и считывания, магнитопровод которого выполнен в виде П-образных ферромагнитных пластин, и безобмоточный ротор, маг«итопровод которого выполнен в виде прямоугольных пластин З.
Данное устройство является наиболе Близким к изобретению по технической сущности и достигаемому результату.
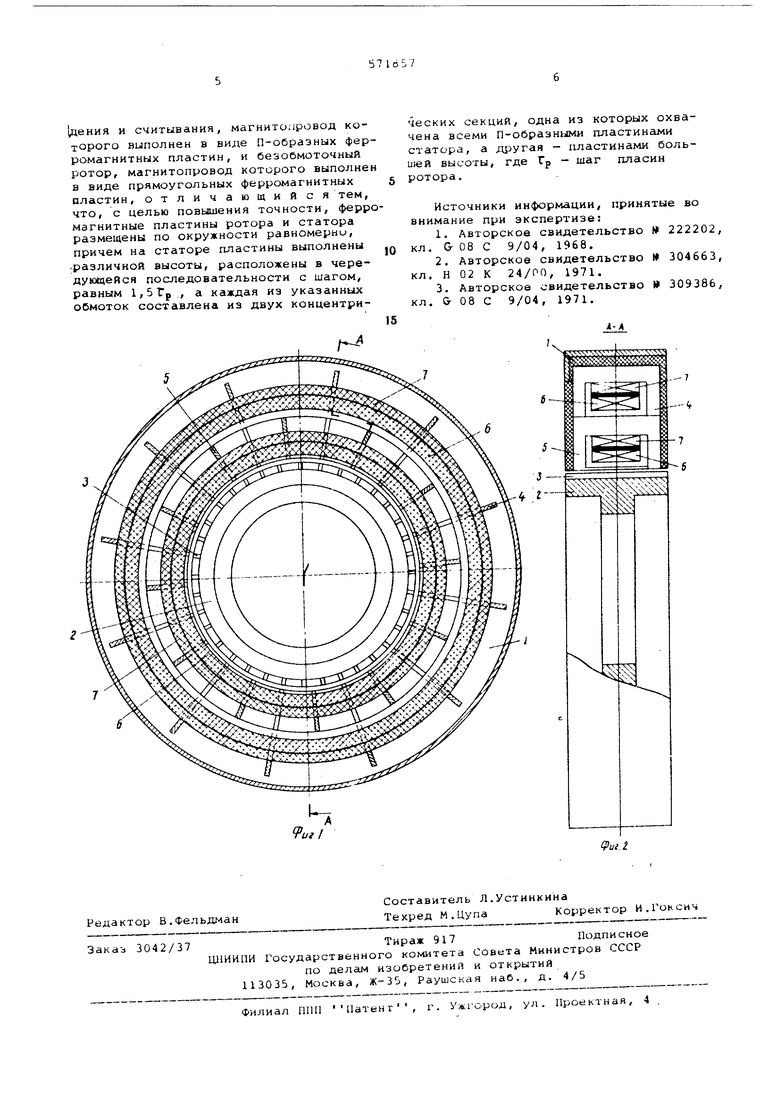
В таком преобразователе технологические погрешности изготовления отдельных элементов оказывают влияние на точность преобразования угла в электрический сигнал. Это объясняется тем, что отдельные пластины магнитопровода статора сгруппированы в полюса, на которых размещены считывающие о&мотки, и поэтому одновременно в фор мировании выходного сигнала преобразователя участвует ограниченное число пластин магнитопровода ротора. Кроме того, дискретное расположение полюсов статора исключает возможность использования эффекта кругового осреднения погрешностей. Поэтому большое влияние на точность преобразования оказывает эксцентриситет ротора относительно статора. Целью изобретения является повышение точности преобразования. Это достигается тем, что в бесконтактном преобразователе, содержащек статор с обмотками считывания и возбуждения, магнитопровод .которого выполнен в виде П-образных ферромагнитных пластин, ротор, магнитопровод которого выполнен в виде прямоугольных пластин, ферромагнитные пластины ротора и статора уложены равномерно по окружности, причем на статоре плас тины выполнены различной высоты, расположены в чередующейся последовности с шагом, равным 1, 5 Гр , а каждая из указанных обмоток составлена из двух концентрических секций, одна из которых охвачена всеми П-образными пластинами статора, а другая - пластинами большей высоты, где Тр - шаг пластин ротора. На фиг. 1 изображен бесконтактный преобразователь угла; на фиг. 2 - сечение по А-А на фиг. 1. Преобразователь угла содержит ста тор 1 и ротор 2. Ротор представляет собой кольцевую конструкцию из немагнитного материала, по наружной образующей которого равномерно с заданным шагом расположены пластины магнитопровода из ферромагнитного материала 3. Статор также выполнен кольцевым из немагнитного материала, по внутренней образующей которого равно мерно с шагом, равным 1,5 Тр , где Тр шаг пластин ротора, расположены П-об разные пластины 4 и 5, выполненные и ферромагнитного материала. Пластины 4 и 5 магнитопровода ста тора выполнены разной длины и расположены в чередующейся последовательности. Обмотки возбуждения 6 и считывания 7 имеют кольцевую форму и расположены концентрично оси вращения ротора и каждая из них составлена из двух секций. Одна секция каждой обмо ки охвачена пластинами 4 и 5, а другая секция обмоток охвачена только пластиншли 5, имеющими большую высот Преобразователь угла представляет собой трансформаторное устройство с переменньи- коэффициентом трансформации. Коэф;.;щиент трансформации может изменяться от некоторой минимальной до некоторой максимальной величины в зависимости от взаимного положения магнитопровода ротора и статора. Магнитный поток, возникающий в преобразователе при питании обмоток возбуждения током переменной частоты, распределяется по пластинам магнитопровода пропорционально проводимостям магнитной цепи. Так как шаг пластин ротора в полтора раза меньше шага пластин статора, то при совпадении пластин ротора, например, с короткими пластинами 4 статора, пластины 5 статора находятся в середине промежутка между пластинами ротора. При этом проводимость магнитной цепи: ротор-пластины 4 - максимальна, и ЭДС , наведенная в секции обмотки считывания, проходящей через эти пластины, максимальна. Проводимость магнитной цепи : ротор-пластины 5 - минимсшьна, и ЭДС, наведенная в секции обмотки считывания,охваченной пластинами 5, минимальна. Так как секции обмотки считывания включены последовательно встречно, на выходе преобразователя появляется сигнал, величина которого равна разности ЭДС ., наведенных в секциях обмотки считывания. При повороте ротора на 1/4 шага от предыдущего положения проводимости магнитных цепей будут одинаковы, ЭДС наведенные в каждой обмотке считывания, равны, и суммарное напряжение выходного сигнала будет равно нулю. Таким образом, при вращении ротора в обмотке считывания преобразователя наводится ЭДС / периодически изменяющаяся от нуля до максимального значения 2п раз за один оборот ротора, где п. - число пластин ротора. Сигнал на выходе преобразователя имеет вид баланско-модулированных колебаний с несущей частотой, равной частоте возбуждения преобразователя, и с огибающей частотой, пропорциональной произведению скорости вращения ротора на число его зубцов. Огибающая выходного сигнала изменяется по закону синуса от угла поворота ротора относительно статора. Вследствие эффекта кругового осреднения погрешностей снижено влияние технологических погрешностей изготовления отдельных деталей и зксцентриа41тета ротора относительно статора на точность преобразования угла поворота вала в электрический сигнал, что, в свою очередь, приводит к повы1иению точности преобразования и разрешающей способности устройства. Формула изобретения Бесконтактный преобразователь угла, содержащий статор с обмотками возбуж
