первый выход которого соединен со вхдом двоичного счетчика и вторым входом блока регистрации состояния контролируемого объекта, второй и тртий выходы - с первым и вторым входами реверсивного счетчика, четвертый выход - со вторым входом блока счета и дешифрации импульсов в серии, выход двоичного счетчика соединен с третьим входом реверсивного счетчика, выход которого через дешифратор состояния контролируемого объект соединен с третьим входом блока регистрации состояния контролируемого объекта.
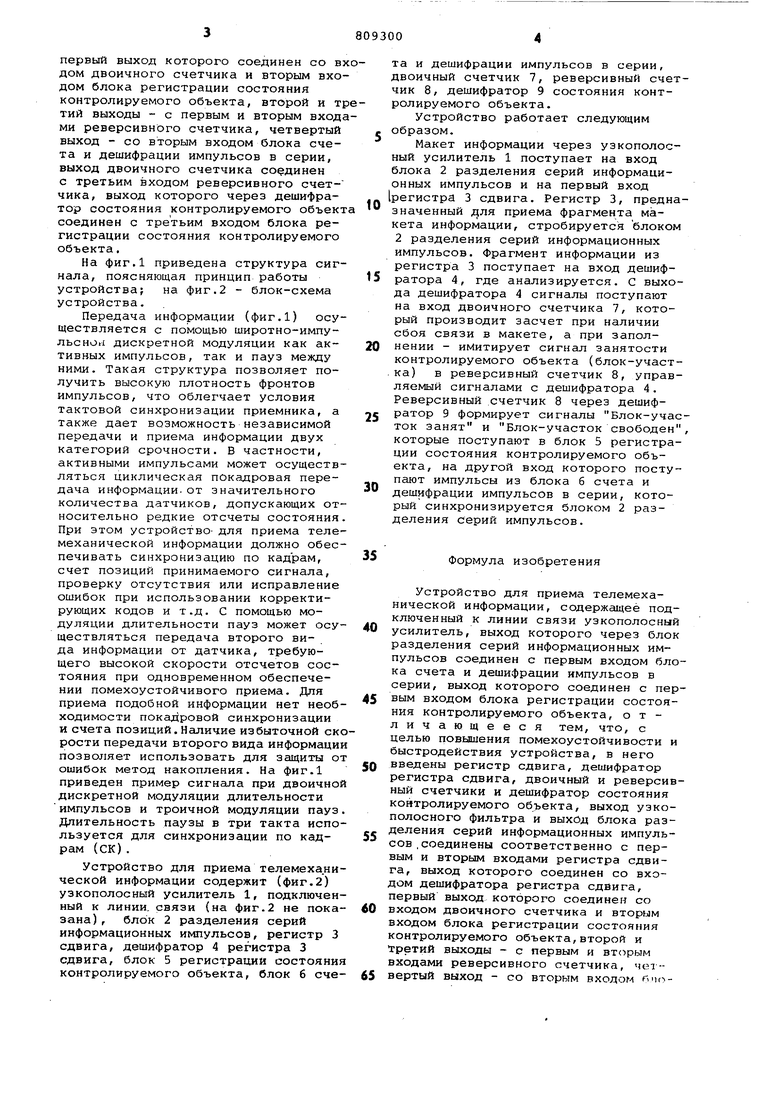
На фиг.1 приведена структура сигнала, поясняющая принцип работы устройства; на фиг.2 - блок-схема устройства.
Передача информации (фигЛ) осуществляется с помощью широтно-импульснои дискретной модуляции как активных импульсов, так и пауз между ними. Такая структура позволяет получить высокую плотность фронтов импульсов, что облегчает условия тактовой синхронизации приемника, а также дает возможность независимой передачи и приема информации двух категорий срочности. В частности, активными импульсами может осуществляться циклическая покадровая передача информации, от значительного количества датчиков, допускающих относительно редкие отсчеты состояния. При этом устройство- для приема телемеханической информации должно обеспечивать синхронизацию по кадрам, счет позиций принимаемого сигнала, проверку отсутствия или исправление ошибок при использовании корректирующих кодов и т.д. С помощью модуляции длительности пауз может осуществляться передача второго вида информации от датчика, требующего высокой скорости отсчетов состояния при одновременном обеспечении помехоустойчивого приема. Для приема подобной информации нет необходимости покадровой синхронизации и счета позиций. Наличие избыточной скорости передачи второго вида информации позволяет использовать для защиты от ошибок метод накопления. На фиг.1 приведен пример сигнгша при двоичной дискретной модуляции длительности импульсов и троичной модуляции пауз. Длительность паузы в три такта используется для синхронизации по кадрам (СК) .
Устройство для приема телемеханической информации содержит (фиг.2) узкополосный усилитель 1, подключенный к линии, связи {на фиг.2 не показана) , блок 2 разделения серий информационных импульсов, регистр 3 сдвига, дешифратор 4 регистра 3 сдвига, блок 5 регистрации состояния контролируемого объекта, блок 6 счета и дешифрации импульсов в серии, двоичный счетчик 7, реверсивный счетчик 8, дешифратор 9 состояния контролируемого объекта.
Устройство работает следующим образом.
Макет информации через узкополосный усилитель 1 поступает на вход блока 2 разделения серий информационных импульсов и на первый вход регистра 3 сдвига. Регистр 3, предназначенный цпя приема фрагмента макета информации, стробируется блоком 2 разделения серий информационных импульсов. Фрагмент информации из регистра 3 поступает на вход дешифратора 4, где анализируется. С выхода дешифратора 4 сигналы поступают на вход двоичного счетчика 7, который производит засчет при наличии сбоя связи в макете, а при заполнении - имитирует сигнгш занятости
контролируемого объекта (блок-участ.ка) в реверсивный счетчик 8, управляемый сигналами с дешифратора 4. Реверсивный счетчик 8 через дешиф5 ратор 9 формирует сигналы Блок-участок занят и Блок-участок свободен, которые поступают в блок 5 регистрации состояния контролируемого объекта, на другой вход которого поступают импульсы из блока 6 счета и дешифрации импульсов в серии, который синхронизируется блоком 2 разделения серий импульсов.
Формула изобретения
Устройство для приема телемеханической информации, содержащее подключенный к линии связи узкополосный усилитель, выход которого через блок
разделения серий информационных импульсов соединен с первым входом блока счета и дешифрации импульсов в серии, выход которого соединен с первым входом блока регистрации состояния контролируемого объекта, отличающееся тем, что, с целью повышения помехоустойчивости и быстродействия устройства, в него
введены регистр сдвига, дешифратор регистра сдвига, двоичный и реверсивный счетчики и дешифратор состояния контролируемого объекта, выход узкополосного фильтра и выход блока разделения серий информационных импульсов .соединены соответственно с первым и вторым входами регистра сдвига, выход которого соединен со входом дешифратора регистра сдвига, первый выход которого соединен со
входом двоичного счетчика и вторым входом блока регистрации состояния контролируемого объекта,второй и Третий выходы - с первым и входами реверсивного счетчика, чсп ВерТЫЙ выход - со вторым входом счета и.дешифрации импульсов в серии, выход двоичного счетчика соедин с третьим входом реверсивного счетчика, выход которого через дешифратор состояния контролируемого объекта соединен с третьим входом блока регистрации состояния контролируемого объекта. ч-г н-г н c/f I млмм Источники информации, принятые во внимание при экспертизе 1.Система телесигнализации ДС |1920. Техническое описание т.1920 Р 1072,Финляндия,А/О НОКИА электроника. 2.Автоматика, телемеханика и связь. Транспорт, 1977, 11, с.43 рис.1,(прототип). шжм
| название | год | авторы | номер документа |
|---|---|---|---|
| Телемеханическая система | 1987 |
|
SU1424044A1 |
| Устройство для телеуправления и телесигнализации | 1984 |
|
SU1247916A1 |
| Устройство для контроля цифровых блоков | 1989 |
|
SU1679487A1 |
| Устройство для регистрации рабочих параметров транспортного средства | 1987 |
|
SU1481821A1 |
| Диспетчерский полукомплект телемеханического устройства | 1975 |
|
SU556479A1 |
| Устройство воспроизведения цифровой магнитной записи | 1990 |
|
SU1777175A1 |
| Устройство для контроля параметров | 1984 |
|
SU1166065A1 |
| Многоканальное устройство для ввода информации | 1987 |
|
SU1524039A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 1991 |
|
RU2020595C1 |
| Обнаружитель пауз речи в системе с импульсно-кодовой модуляцией | 1988 |
|
SU1540018A1 |
