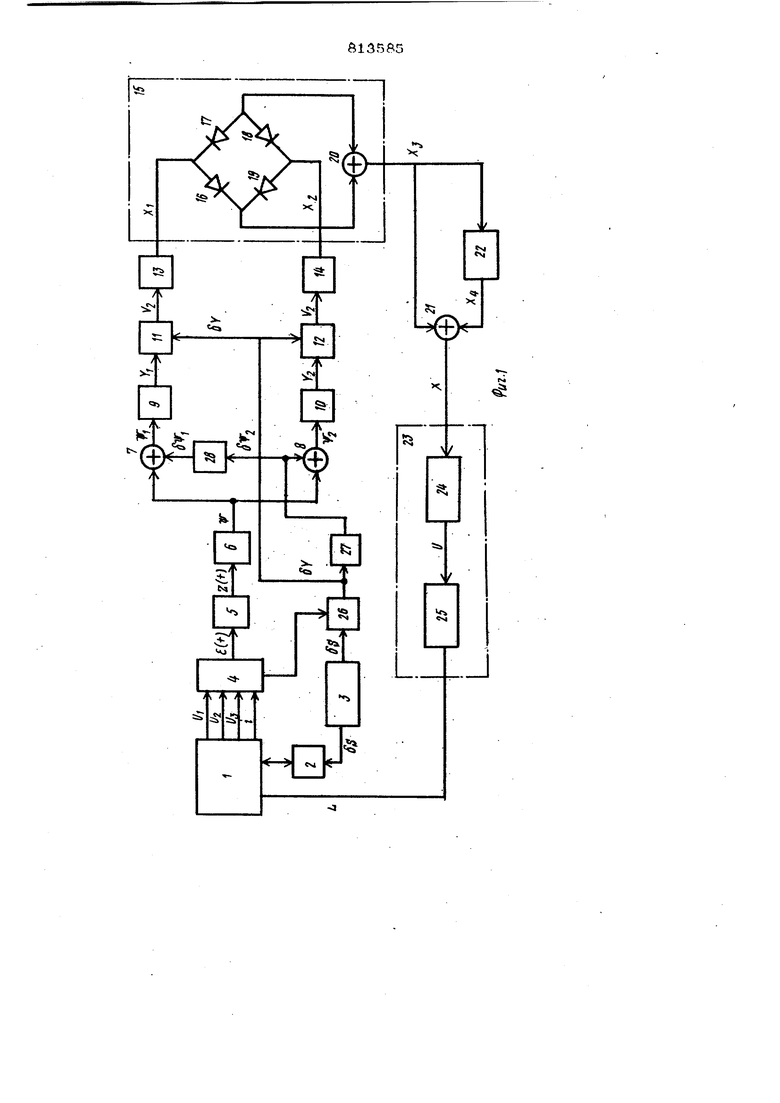
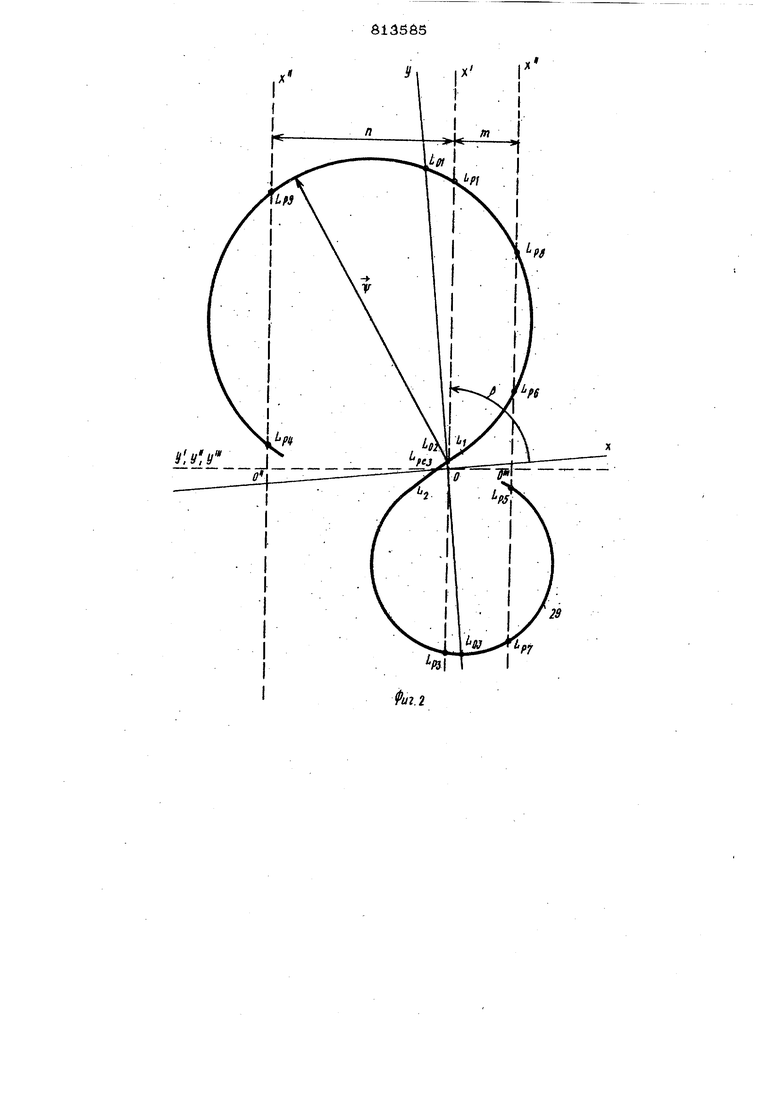
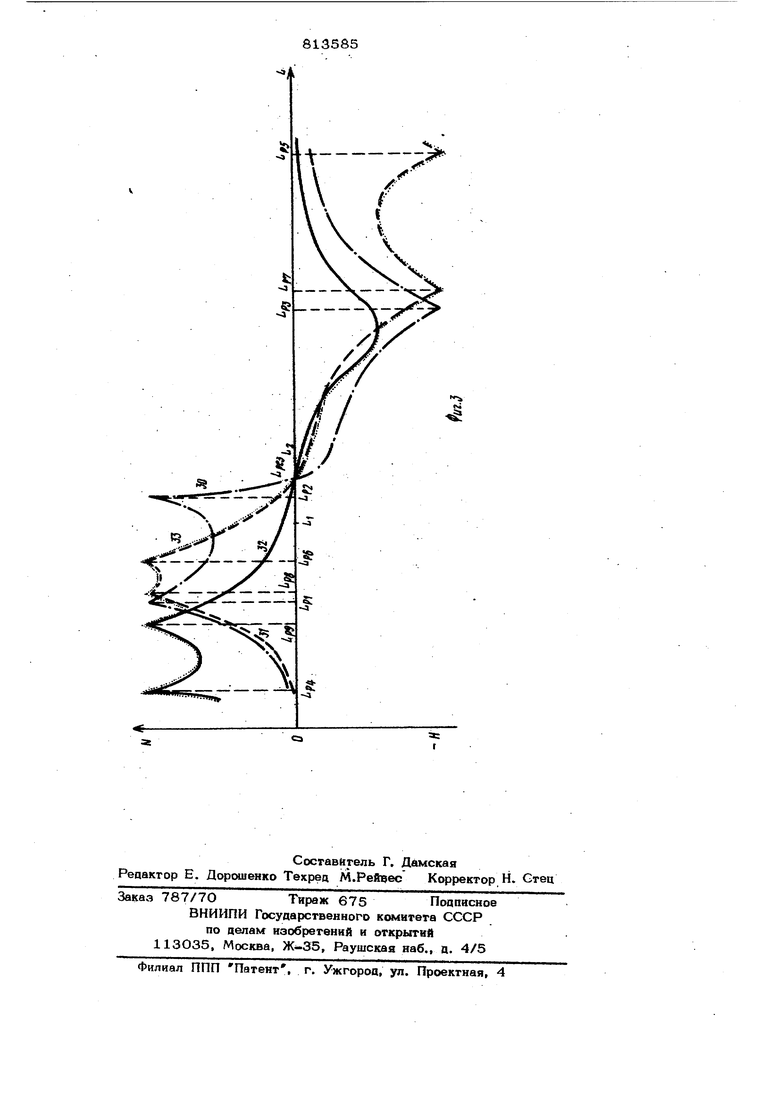
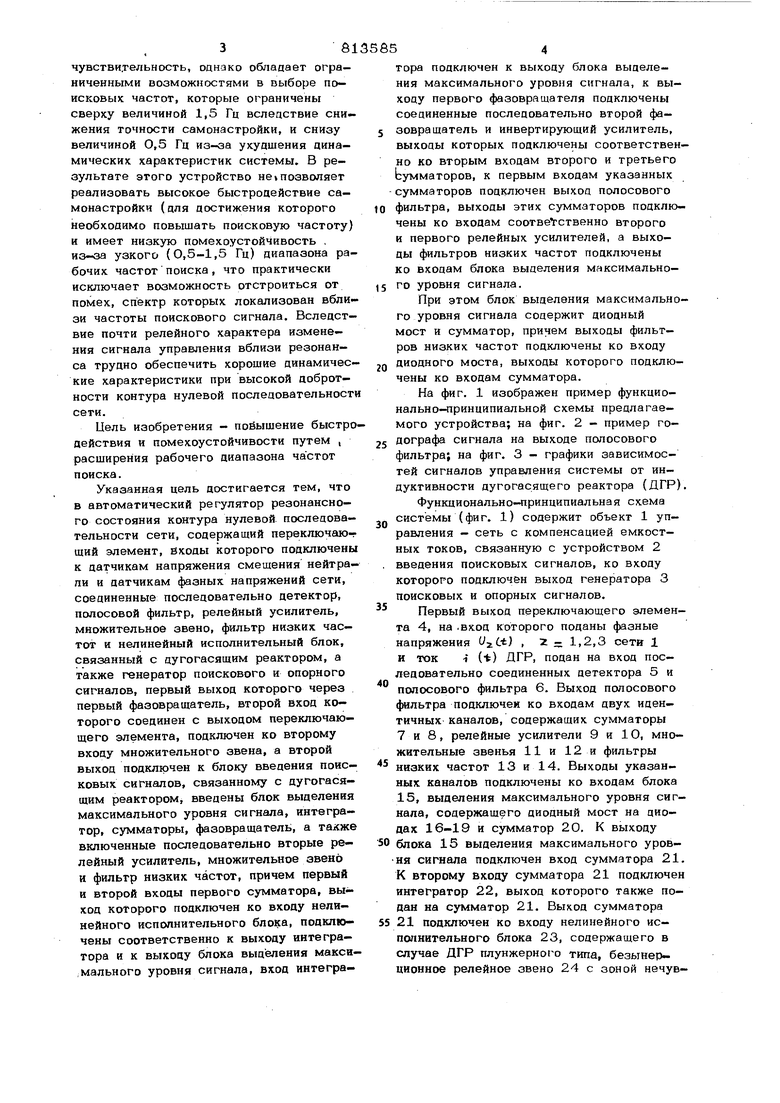
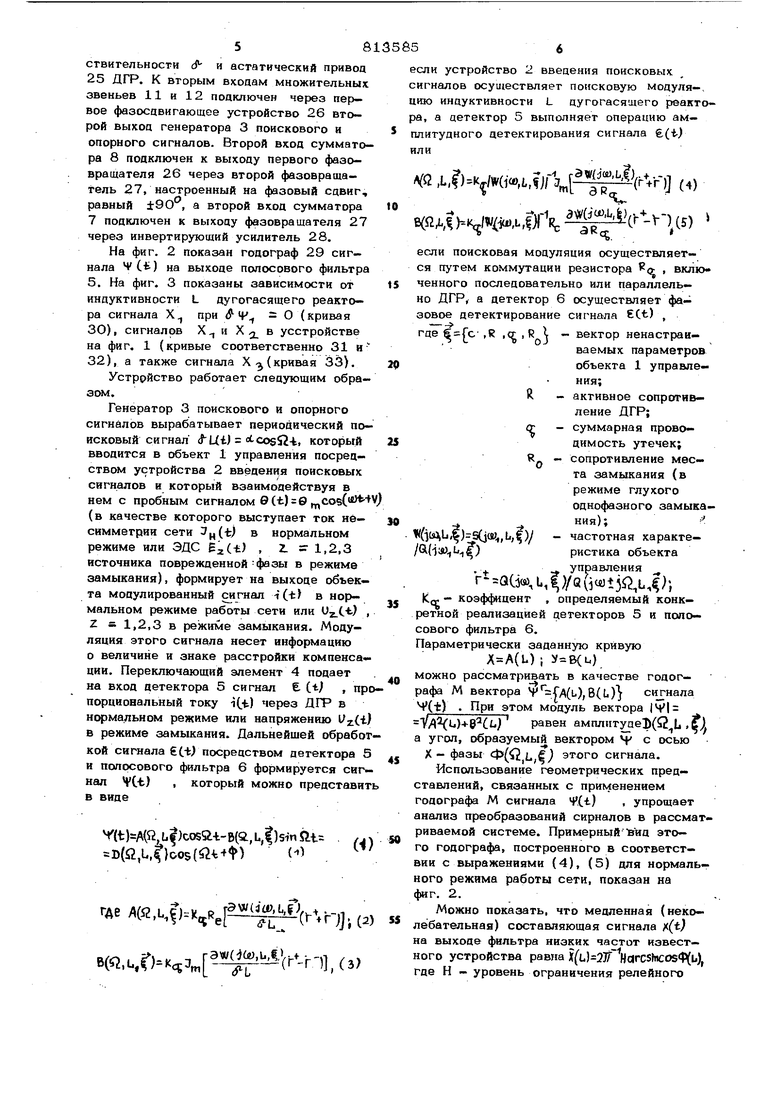
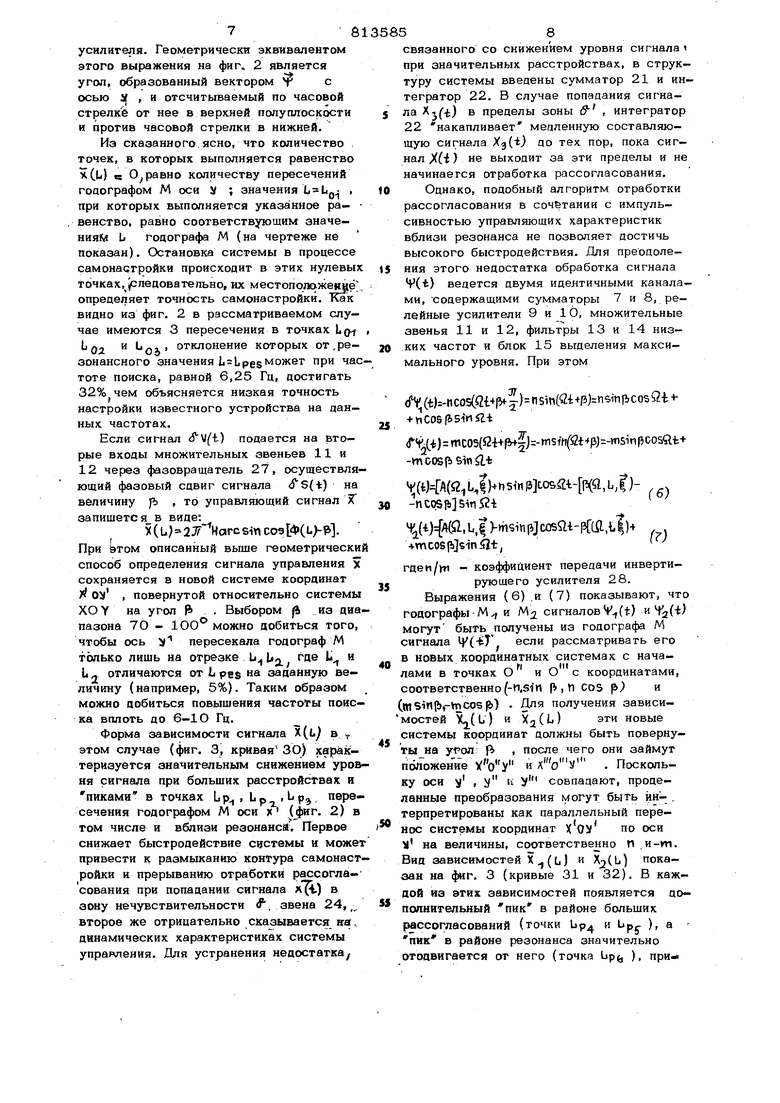
Изобретение относится к системам автоматической настройки компенсации емкостных токов однофазнык аамыка НИИ на землю в трекфазных электрических сетях. Известно устройство для автоматичес кой настройки дугогасящей катушки в ка бельных сетях, содержащее емкость, подключенную к одной из фаз сети, фазо вращающий мост, на вход которого подан напряжение смещений нейтрали, а выход подключен ко входу фазочувствительного усилителя, причем на второй вход фазо- чувствительного усилителя подано фазное напряжение той фазы, к которой присоединена емкость, а выход подай на схему управления приводом дугогасящего реактора fl}. Данное устройство чувствительно к изменениям фазы напряжения несиммет- рии сети и вследствие этого обладает невысокой точностью и неприменимо в воздушных и воздушно-кабельных сетях. Наиболее близким к предлагаемому п является автоматический регулятор ре- зонансного состояния контура нулевой последовательности сети, содержащий переключающий элемент, входы которого подключены к датчикам напряжения смещения нейтрали и датчикам фазных напряжений сети, соединенные последовательно детектор, полосовой фильтр, первый релейный усилитель, первое множительное звено, первый фильтр низких частот и нелинейный исполнительный блок, соединенный с дугогасящим реактором, а также генератор поискового и опорного сигналов, первый выход которого через первый фазовращатель, второй вход которого соединен с выходом переключающего элемента, подключен ко второму входу множительного звена, а второй выход подключен к блоку введения поисковых сигналов, соединенному с дугогасящим реактором 2}. Данный автоматический регулятор имеет повышенную помехоустойчивость и 3S чувстви.гельность, однако обладает ограниченными возможностями в выборе поисковых частот, KOTOpbie ограничены сверку величиной 1,5 Гц вследствие сни жения точности самонастройки, и снизу величиной 0,5 Гц из-за ухудшения динамических характеристик системы. В результате этого устройство не позволяет реализовать высокое быстродействие самонастройки (для достижения которого необходимо повышать поисковую частоту и имеет низкую помехоустойчивость . из-за узкого (О,5-1,5 Гц) диапазона ра бочих частот поиска, что практически исключает возможность отстроиться от помех, спектр которых локализован вбли зи частоты поискового сигнала. Вследствие почти релейного характера изменения сигнала управления вблизи резонанса трудно обеспечить хорошие динамичес кие характеристики при высокой добротности контура нулевой последовательност сети. Цель изобретения - поёышение быстр действия и помехоустойчивости путем , расширения рабочего диапазона частот поиска. Указанная цель достигается тем, что в автоматический регулятор резонансного состояния контура нулевой, последовательности сети, содержащий переключающий элемент, йходы которого подключены к датчикам напряжения смещения нейтра ли и датчикам фазных напряжений сети, соединенные последовательно детектор, полосовой фильтр, релейный усилитель, множительное звено, фильтр низких частот и нелинейный исполнительный блок, связанный с дугогасящим реактором, а также генератор поискового и опорного сигналов, первый выход которого через первый фазовращатель, второй вход которого соединен с выходом переключающего элемента, подключен ко второму входу множительного звена, а второй выход подключен к блоку введения поисковых сигналов, связанному с дугогася- щим реактором, введены блок выделения максимального уровня сигнала, интегратор, сумматоры, фазовращатель, а также включенные последовательно вторые релейный усилитель, множительное звено и фильтр низких частот, причем первый и второй входы первого сумматора, выход Kotoporo подключен ко входу нелинейного исполнительного блока, подключены соответственно к выходу интегратора и к выходу блока выделения максимального уровня сигнала, вход интегра5тора подключен к выходу блока выделения максимального уровня сигнала, к выходу первого фазовращателя подключены соединенные последовательно второй фа- зовращатель и инвертирующий усилитель, выходы которых подключены соответственно ко вторым входам второго и третьего сумматоров, к первым входам указанных сумматоров подключен выход полосового фильтра, выходы этих сумматоров подключены ко входам cooTBeVCTBBHHo второго и первого релейных усилителей, а выходы фильтров низких частот подключены ко входам блока выделения максимального уровня сигнала. При этом блок выделения максимального уровня сигнала содержит диодный мост и сумматор, причем выходы фильтров низких частот подключены ко входу диодного моста, выходы которого подключены ко входам сумматора. На фиг. 1 изображен пример функционально-принципиальной схемы предлагаемого устройства; на фиг. 2 - пример годографа сигнала на выходе полосового фильтра; на фиг. 3 - графики зависимостей сигналов управления системы от индуктивности дугогасящего реактора (ДГР). Функционально-принципиальная схема системы (фиг. 1) содержит объект 1 управления - сеть с компенсацией емкостных токов, связанную с устройством 2 введения поисковых сигналов, ко входу которого подключен выход генератора 3 поисковых и опорных сигналов. Первый выход переключающего элемента 4, на .вход которого поданы фазные напряжения Ц) , г. - 1,2,3 сети 1 И ток -1 (-t) ДГР, подан на вход последовательно соединенных детектора 5 и полосового фильтра 6. Выход полосового фильтра подключен ко входам двух идентичных каналов, содержащих сумматоры 7 и 8, релейные усилители 9 и 1О, множительные звенья 11 и 12 и фильтры низких частот 13 и 14. Выходы указанных каналов подключены ко входам блока 15, выделения максимального уровня сигнала, содержащего диодный мост на диодах 16-19 и сумматор 20. К выходу блока 15 выделения максимального уровня сигнала подключен вход сумматора 21. К второму Входу сумматора 21 подключен интегратор 22, выход которого также подан на сумматор 21. Выход сумматора 21 подключен ко входу нелинейного исполнительного блока 23, содержащего в случае ДГР плунжерного типа, безынерционное релейное звено 24 с зоной нечувсгвигельностн d и астатический привод 25 ДГР. К вторым входам множительных звеньев 11 и 12 подключен через вое фазосцвигающее устройство 26 второй выход генератора 3 поискового и опорного сигналов. Второй вход сумматора 8 подключен к выходу первого фазовращателя 26 через второй фазовращатель 27, настроенный на фазовый сдвиг, равный ±90, а второй вход сумматора 7 подключен к выходу фазовращателя 27 через инвертирующий усилитель 28. На фиг. 2 показан годограф 29 сигнала SCt) на выходе полосового фильтра 5. На фиг. 3 показаны зависимости от индуктивности L дугогасящего реактора сигнала Х при V О (кривая 30), сигналов Х и X в усстройстве на фиг, 1 (кривые соответственно 31 и 32), а также сигнала X (кривая 33). Устррйство работает следующим образом. Генератор 3 поискового и опорного сигналов вырабатывает периодический поисковый сигнал (fUi) cosS2-i, который вводится в объект 1 управления посредством устройства 2 введения поисковых сигналов и который взаимодействуя в нем с пробным сигналом G(t) в cos( (в качестве которого выступает ток не- симметрии сети н( нормальном режиме или ЭДС ) , 2. - 1,2,3 источника поврежденной-фазы в режиме замыкания), формирует на выходе объекта модулированный сигнал i( в нормальном режиме работы сети или U.Ct) Z 1,2,3 в режиме замыкания. Модуляция этого сигнала несет информацию о величине и знаке расстройки компенсации. Переключающий элемент 4 подает на вход детектора 5 сигнал Е С , пр порциональный току i(t) через ДГР в нормальном режиме или напряжению в режиме замыкания. Дальнейшей обрабо кой сигнала €C-fc) посредством детектора 5 и полосового фильтра 6 формируется сигнал VC-t) , который можно представи в виде N{t)A(Q,.|)cosa-t-B(ft,L,|)sinftt /j D(fl,U,}oos(-ft)( rAe(S2.L.f)Ve -tL5V.nj.,(a B(Q.4r)4.4 - lrtrn,(3) сли устройство 2 введения поисковых игналов осуществляет поисковую модуля-, ию индуктивности L цугогасящего реактоа, а детектор 5 выполняет операцию амлитудного детектирования сигнала (i) ли Q .l.(i,i,){ (iiM),)(s) V если поисковая модуляция осуществляется путем коммутации резистора R( , вклю ченного последовательно или параллельно ДГР, а детектор 6 осуществляет фазовое детектирование сигнала ECt) , где б Гс-,R -CC.R - вектор ненастраиваемых параметров объекта 1 управления;R - активное сопротивление ДГР; - суммарная проводимость утечек; сопротивление места замыкания (в режиме глухого однофазного замыкания); (it blj sCittJ b,)/ частотная характе/ад .цС) ристика объекта управления ,1Ду(,ьД, . |С - коэффицент , определяемый конкретной реализацией детекторов 5 и полосового фильтра 6. Параметрически заданную кривую (Ь); (ь) можно рассматривать в качестве годографа М вектора (ь), B(lj) сигнала MCt) . При этом модуль вектора (IT равен амплпту;аеЗ)(Ь , щ) а угол, образуемый вектором Н с осью X - фазы Ф( i-ч) этого сигнала. Использование геометрических представлений, связанных с применением годографа М сигнала 4Ci) , упрощает анализ преобразований сирналов в рассматриваемой системе. Примерный Твид этого годограф, построенного в соответствии с выражениями (4), (5) для нормального режима работы сети, показан на фиг. 2. Можно показать, что медленная (неколебательнан) составляющая сигнала n(t) на выходе фильтра низких частот известного устройства равна )(( Нс|ГС51псо5Ф(ь), где Н - уровень ограничения релейного усилигеля. Геометрически эквивалентом этого выражения на фиг, 2 является угол, образованный вектором у с осью Ц , и отсчитываемый по часовой стрелке от нее в верхней полуплоскости и против часовой стрелки в нижней. Иа сказанного.ясно, что количество . точек, в которых выполняется равенство ч(Ь) tz Отравно количеству пересечений годографом М оси у ; значения Ъги.. , при которых выполняется указанное ра. венство, равно соответствующим значениям Ь годографа М (на чертеже не Показан). Остановка системы в процессе самонастройки происходит в этих нулевы Точках,5слецовательно, их местополехже«це определяет точность самонастройки. видно из фиг. 2 в рассматриваемом случае имеются 3 пересечения в точках LO 03. ОЬ отклонение которых от,резонансного значения L Lpes час тоте поиска, равной 6,25 Гц, достигать 32% чем объясняется низкая точность настройки известного устройства на данных частотах. Если сигнал (t) подается на вторые входы множительных звеньев 11 и 12 через фазовращатель 27, осуществля ющий фазовый сдвиг сигнала (t) на величину jfb , то управляющий сигнал 1C запишется в виде: X (L.) 2 Нагс siY С091Ф(ь;-Э. При &ТОМ описанный выше геометрически способ определения сигнала управления X сохраняется в новой системе координат , повернутой относительно системы XOY на угол I . Выбором fi из диа пазона 70 - 100 можно добиться того, чтобы ось У пересекала годограф М только лишь на отрезке Ь 1 где и L л отличаются от L peg на заданную величину (например, 5%). Таким образом можно добиться повышения частоты поиска вплоть до 6-10 Гц. Форма зависимости сигнала Х(ь в у этом случае (фиг. 3, кривая ЗО) характеризуется значительным снижением уров ня сигнала при больших расстройствах и пиками в точках Lp , Lp -Ьр пересечения годографом М оси (фиг. 2) в том числе и вблизи резонансв1. Первое снижает быстродействие С11стемы и може привести к размыканию контура самонаст ройки и прерыванию отработки рассогласования при попадании сигнала x(i.) в зону нечувствительности . звена 24,, второе же отрицательно сказывается ига динамических характеристиках системы управления. Для устранения нeдocтaткa связанного со снижением уровня сигнала т при значительных расстройствах, в структуру системы введены сумматор 21 к интегратор 22. В случае попадания сигнала 3 пределы зоны ( , интегратор 22 накапливает медленную составляющую сигнала )(j(t) до тех пор, пока сигнал ) не выходит за эти пределы и не начинается отработка рассогласования. Однако, подобный алгоритм отработки рассогласования в сочетании с импульсивностью управляющих характеристик вблизи резонанса не позволяет достичь высокого быстродействия. Для преоцоле- ния этого недостатка обработка сигнала V(t) ведется двумя идентичными каналами, содержащими сумматоры 7 и 8, релейные усилители 9 и 10, множительные звенья 11 и 12, фильтры 13 и 14 низких частот и блок 15 выделения максимального уровня. При этом fV(tMcos(i2i4(v|)n5iii(2i+P)n%iniibcosQt+ + ViCOS|b5in$li (fV,j(i)mc05(i2-t-t-pr+|j:-rTisfn()-m5inpcosftt+ -moosp)Sinu-fc S;(t)rA(S2i ц| hhsin p co&at- f fl, L,f -n cos PI Bin i 4(i)A(fl,L, bwsinpJcosSli-pTOl.ii,,. 4mcosp., гдем/ni - коэффициент передачи инвертирующего усилителя 28, Выражения (6).и (7) показывают, что годографы М и Мд сигналов V(t) и (i) могут быть получены из годографа М сигнала 4(-tT если рассматривать его в новых координатных системах с началами в точках О и О с координатами, соответственно(-и.5111 ( , П cos f) и wSiri|b,-Vnc05p)) . Для получения зависимостей lL(L) и ХдСЬ)эти новые системы координат должны быть поверну- угол П , после чего они займут пбложение и . Поскольку оси , J/ (X V совпадают, проделанные преобразования могут быть iiH- . терпретированы как параллельный перенос системы координат X Ov по оси 1| на величины, соответственно п .и-т. Виц зависимостей Х, (и) и X2Clj) показан на фиг. 3 (кривые 31 и 32). В каждой из этих зависимостей появляется дополнительный пик в районе больших рассогласований (точки Ьр и ), а пик в районе резонанса значительно отодвигается от него (точка Ьр, ), причем зависимость X,(t ) в области нецокрмпенсации аналогична зависимости ) в области перекомпенсации и иа- оборот. С помощью блока 15 вьшеления максимального уровня сигнала входы звеньев 2О и 21 подключаются либо к сигналу Xi(t) . либо сигналу Xj(-t) в зависимости от того, какой из этих сигналов больше по абсолютной величине. В результате формируется зависимость Xj(L (фиг. 3 кривая 33), в которой отсутствуют значительные снижения уровня сигнала при больших расстройках и импульсивность вблизи резонанса, причем подход к резонансу теперь имеет характер, близкий к линейному, что позволяет значительно улучшить динамические свой ства и быстродействие самонастройки. В случае, если поисковая модуляция осуществляется путем коммутации резисTopaRjy , включенного последовательно или параллельно ДГР, в качестве детекто ра 6 может быть применен частотный детектор. При этом используется тот . факт, что частота сигнала есть произвоа ная от его мгновенной фазы, и следовательно, фазовая модуляция сигнала 6(t) , несущая информацию о положении резонанса, сопровождается частотной модуляцией этого сигнала по закону производной от фазовой модуляции. Сигнал y(ij на выходе звена 6 связан при этом .с сигналом 4(t) соотношением 4(i)olV(t) Годограф М сигнала 4(t) оказывается теперь повернутым на ЭО по отношению к годографу М сигнала 4.(t) , поэтому фазовый сдвиг /Ь следует выбирать в диапазоне ( 1СР). Применение частотного детектора 5, не требующего для своей работы опорного сиг- нала, позволяет упростить реализацию сн темы, а выходной сигнал его может ис. пользоваться также для настройки компенсации в режиме перемежаюшетчх:я дугового замыкания. В режиме однофазного замыкания (вследствие резкого понижения добротности объекта управления ) годограф М выступает в виде отрезка прямой, практически совпадающего с осью Л . При этом добавление сигналов f4(t) и fY2( к сигналам (-Ь) и КдС-) устраняет релейный характер зависимостей Х(Ь) и X2(ti) , а следовательно, и Xj{b fciTO и обеспечивает улучшение динамических; характеристт1к системы в этом режима, в частности, предотвращая автоколебательный характер переходного процесса. Для сохранения неизменным знака обрат чой связи контура настройки Ь фазовращатель 26 по сигналу с переключающего элемента 4 сдвигает фазу сигнала о Y(t) ,по отношению к сигналу S(-t) на 180. Если в системе используется ДГР с подмагничиванием, то в качестве нелинейного исполнительного блока 23 выступает устройство управления подмагни- чивания ДГР, Астатический характер управления в этом случае обеспечивается за счет интегратора 22. {aличиe сумматора 21 дает возможность организовать. .. в системе пропорционально-интегральное управление, что улучшает динамические . характеристики, условия устойчивости и, как следствие, позволяет повысить быстророцействие самонастройки. Анализ выражений (2) - (5) показывает, что точность самонастройки может быть повышена если в качестве выход- ной координаты объекта 1 управления взять ток -(i) дугогасящего реактора. Работа блока 15 выделения максимального уровня сигнала происходит следующим образом. Если Х и j- , то из диодов 16 и 19 открыт ток, к като- . ду которого приложено большее напряжение. Диоды 17 и 18 при этом закрыты. Аналогично, если Х,о и . го диоды 16 и 19 закрыты, а из диодов 17 и 18 открыт ток, к аноду которого приложено большее по абсолютной величине напряжение. Если 0 и Х2.0 , то на выходе сумматора 2О образуется сигнал, раыилй сумме сигналов X и XQ, однако, поскольку-смена знаков сигналов Хх, и Х происходит одновременно (фиг. 3) последний случай значения не имеет. Расширение рабочего диапазона поисковых частот позволяет повысить быстродействие регулятора и улучшить его динамические характеристики. Возможность отстроиться от помех путем изменения частоты поиска позволяет применить регулятор в сетях с высоким уровнем помех, вызванных, например, импульсньпл никовьгм) характером нагрузки. -Йспользование частотного детектора вместо фазового упрощает реализацию и улучшает динамику системы, а также позволяет расширить ее функциональные возможности, поскольку тот же частотный детектор может использоваться для осуществления резонансной настройки по частоте свобоаных колебаний в контуре нулевой последовательности сети в режиме перемежающегося дугового замыкания. 8се это повьоиает эффективность компенсации емкостнык токов однофазных замы каний на землю и вместе с тем надежность и безопасность электроснабжения. Формула изобретения 1. Автоматический регулятор резонан сного состояния контура нулевой послецо вательности сети, содержащий переключающий элемент, вхоцы которого подключены к датчикам напряжения смещения нейтрали и датчикам фазнык напряжений сети, соединенные последовательно детек тор, полосовой фильтр, первый релейный усилитель, первое множительное звено, первый фильтр низких частот и нелинейный исполнительный блок, соединенный с дугогасящим реактором, а также генератор поискового и опорного сигналов, первый выкод которого через первый фазовращатель, второй вход которого соединен с выходом переключающего элемента подключен ко второму входу множительно го звена, а второй выход подключен к блоку введения поисковых сигналов, соединенному с дугогасящим реактором, отличающийся тем, что, с целью повышения быстродействия и помехоустойчивости путём расширения рабочего диапазе-на частот поиска, в него введены ёлок выделения максимального уровня сигнала, интегратор, сумматоры, фазовращатель а также включенные последовательно вторые релейный усилитель множительное звено и фильтр низких частот, причем первый и второй входы первого сумматора, выход которого подключен ко входу нелинейного исполнительного блока, подключены соответственно к выходу интегратора и к выходу блока выделения максимального уровня сигнала, вход ин.тегратора подключен к выходу блока выделения максимального уровня сигнала, к выходу первого фазовращателя подключены соединенные последовательно второй фазовращатель и инвертирующий усилитель, выходы которых подключены соответственно ко вторым входам второго и. третьего сумматоров, к первым входам указанных сумматоров подключен выход полосового фильтра, .выходы этих сумматоров подключены ко входам соответственно второго и первого релейных усилителей, а выходы фильтров низких частот подключены ко входам блока выделения максимального уровня сигнала. 2. Регулятор поп. 1отличащ и и с я тем, что блок выделения максимального уровня сигнала содержит диодный мост и сумматор, причем выходы фильтров низких частот подключены ко входу диодного моста, выходы которого подключены ко входам сумматора , Источники информации, приняты во внимание при экспертизе 1,Авторское свидетельство СССР № 150156, кл. Н 02а 3/18, 1955, 2.Авторское свидетельство СССР по заяв14е N 2624976/24-07, кл. Н 02 Н 1/02, 1978 .
Р7
..

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| Устройство для автоматической настройки компенсации емкостного тока однофазного замыкания на землю в электрической сети переменного тока | 1978 |
|
SU748620A1 |
| Устройство для автоматической настройки компенсации емкостных токов в электрических сетях | 1984 |
|
SU1257745A1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| Измеритель и всережимный автокомпенсатор токов однофазных замыканий в воздушных,кабельных и смешанных сетях | 1987 |
|
SU1443079A1 |
| Устройство для автоматической настройки компенсации емкостных токов в кабельных сетях с дугогасящим реактором | 1984 |
|
SU1229898A1 |
| Устройство для стабилизации резонансного состояния контура нулевой последовательности в сети с компенсированной нетралью | 1979 |
|
SU860207A1 |
| Способ компенсации токов однофазного замыкания в трехфазной сети с дугогасящим реактором в нейтрали | 1984 |
|
SU1264263A1 |
| Устройство для экстремальной компенсации емкостных токов утечки с периодической модуляцией индуктивности | 1976 |
|
SU612328A1 |
| Устройство управления дугогасящим реактором с изменяемым воздушным зазором | 1988 |
|
SU1541707A1 |