Изобретение относится к электроэнергетике и предназначено для авто матической настройки индуктивности комг1енсирующих реакторов в трехфазных электрических сетях с незаэемленной нейтралью в нормальном режиме их функционирования. Известно устройство для автомати ческой настройки дугогасящей катушк в кабельных сетях, содержащее емкость, подключенную к одной из фаз сети и фазоврагдающий мост на вход которого подано напряжение смещения нейтрали, а выход подключен ко вход фазочувствительного усилителя, причем на второй вход фазочувствительнего усилителя подано фазное напряж ние той фазыJ, к которой присоединена емкость, а выход подключен к устрой ст ву управления привода компенсирую щего реактора . Чувствительность устройства к изменениям естественной несимметрии сети делает его неприменимым в воздухокабельных и воздушных сетях. Известно также устройство для автоматического управления емкостным током компенсации в электрической сети переменного тока, состоящее из последовательно соединенных фазового детектора, полосового фильтра, релейного усилителя, множительного звена, фильтра низких частот и нелинейного исполнительного устрой ства. Ко второму входу множительного звена управляющего устройства подключен первый выход генератора поисковых сигналов, второй выход которого подключен к входу устройства введения поисковых сигналов, В качестве устройства введения поисковых сиг налов в нем применен резистор, включенный последовательно или параллель но с компенсирующи.м реактором и коммутируемый ткристор ным ключом Данное устройство не зависитГ от тока несиметрии сети и имеет повы1иен ную .чувствительность при некоторых расстройках ко гтура цулевой последе™ вательности сети (КНПС) Оно,не позволяет реализовать высЪкого быстродействия из-за малых частот поиска 0,5-2 Гц в этой связи имеет низкую помехоустойчивость.в зоне действия производственных помех, создаваемых, например, работой блюминга- на метал лургических заводах, на-частотах око ло 1,5-2 Гц что практически исключает возможность отстроиться от подобных помех. Кроме того, вследствие релейнообразного вблизи резонан™ са характера управляющего сигнала весьма затруднительно обеспечить хорошие динагфтческие свойства сис темы при высокой добротности КНПС. Наиболее близким к данному устройству является регулятор резонаисного состояния контура нулевой последовательности сети, содержащий генератор поискового и опорного сигНалов, первый выход которого соединен с входом модулятора параметра объекта управления - контура нулевой последовательности сети,.а второй выход подключен к первым входам первого и второго множительных звеньев, первый и второй релейные усилители, выходы которых соединены со вторыми входами первого и второго множительных звеньев соответственно, первый и второй фильтры низкой час- тоты, входы которых подключены соответственно к выходам первого и второго множительных звеньев, последовательно соединенные сумматор и астатический исполнительный орган компенсирующего реактора з . Данное устройство обеспечивает существенное повышение быстродействия и помехоустойчивости системы. Однако затруднено обеспечение ; требуемой точности выбором фазы опорного сигнала в условиях широкого диапазона изменения параметров сети и повышенных частот поиска. Кроме того, форма статической управляющей характеристики претерпевает изменения при соответствующих изменениях параметров сети. Последнее может препятствовать получению удовлетворительных динамических характеристик системы-о Рациональный выбор параметров корректирующих фазосдвигающйх устройств и коэффициента усиления инвертирующего усилителя требует начальной информации о возможном диапазоне изменений па раметров сети и проведения достаточно трудоемких расчетов. Все это затрудняет наладку устройства. Цель изобретения - повышение точн6ч-ти, улучшение динамических свойств и упрощение наладки регулятора , Указанная цель достигается тем, что в устройство, содержащее генератор поискового и опорного сигналов, первый выход которого соединен со входом модулятора параметра объекта управления - контура нулевой последовательности сети, а второй вых,од подключен к первым входам первого и второго множительного звеньев, первый и второй релейные усилители, выходы которых-соединены со вторыми входами первого и второго множительных звеньев соответственно, первый и второй фильтры низкой частоты, входы которых подключены соответственно к выходам первого и второго , множительных звеньев, последовательно соединенные сумг/iaTop и астатический исполнительный орган компенсирующего реактора, введены датчик напряжения смещения нейтрали, датчик тока компенсирующего реадтора, первый и второй полосовые филbTpiiJ, нас роенные на частоты равнь1е соответственно сумме и разности частоты сети и частоты поисковых сигналов, третий полосовой фильтр, настроенный на частоту сети, третий релейный усилитель, а также первый и второй функциональные преобразователи, а модулятор параметра объек та управления выполнен или из включенного последовательно с компенсирующим реактором, или из резистора включенного параллельно с компенсирующим реактором, причем при выполнении модулятора параметра объекта управления из резистора, :включенного последоваз;ельно с компенсирующим реактором входы первого и второго полосовых фильтров подключены к выходу датчика напряжения смещения нейтрали, вход полосового фильтра подключен к выходу датчика тока компенсирующего реактора, а при выполнении модулятора параметра объекта управления из резистора, включенного параллельно с компенсирующим реактором, входы первого и второго полосовых фильтров соединены с выходом датчика тока компенсирующего реактора, вход третьего половосрго фильтра подключен к выходу датчика напряжения смещения нейтрали, выходы первого, второго и третьего полосовых фильтров соединены соответственно с входами первого, второго и третьего релейных усилителей, выход третьего релейного усилителя подключен к третьим входам множительных звеньев а выходы первого и второго фильтров низкой частоты соединены соответственно через первый и второй функциональные преобразователи с первым и вторым входами сумматоров.
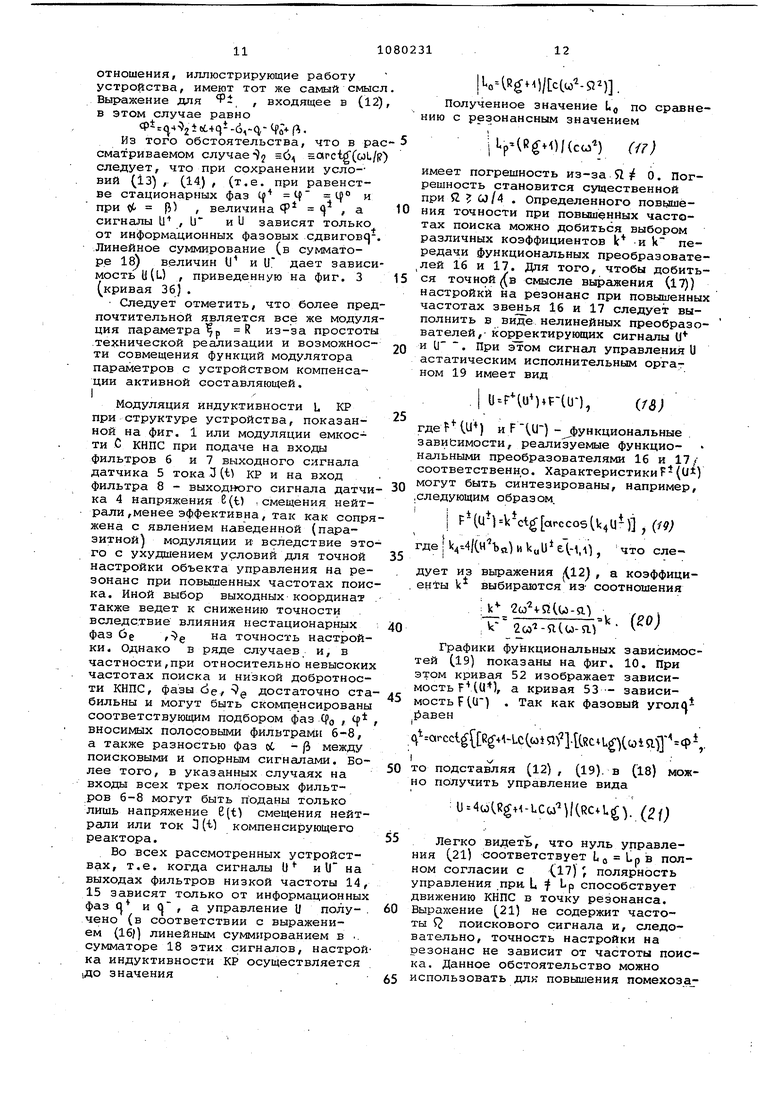
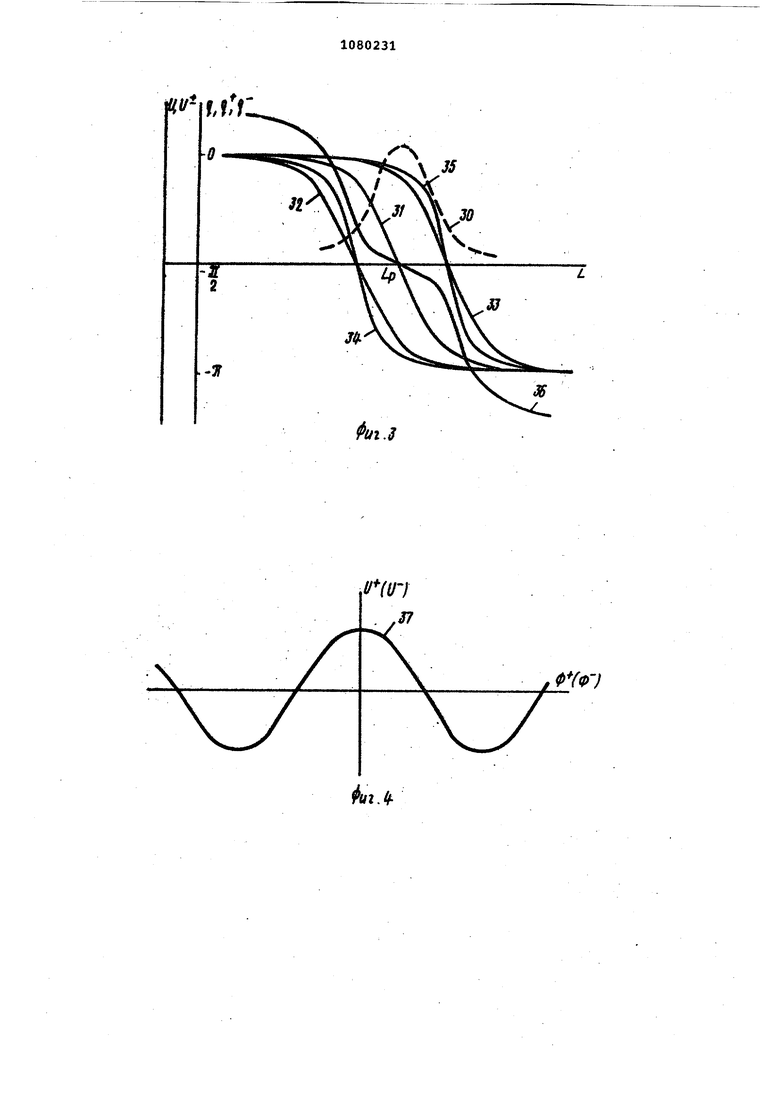
На4иг, 1 изображен пример функционально-принципиальной cxei.ycTройства/ на фиг. 2 - структурнаясхема периодически нестационарного объекта управления;, на фиг, 3 зависимости фазовых характеристик и си1гналов управления от индуктивности компенсирующего реактора (КР) на фиг.4 - графики характеристик зависимостей сигналов на выходах фильтров низкой частоты от разностных фазовых сигналов, поступающих на входы множительных звеньев, на фиг. 5 - аппаратурная реализация модулятора активного сопротивления, включенного последовательно с КР в нейтраль сети; на фиг. 6 - модулятор индуктивности КР; на фиг, 7модулЙтор суммарной активной прово,димости изоляции сети; на фиг, 8 модулятор суммарной емкости изоляции сети относительно земли, на фиг. 9 - тиристорный ключ ТК, входящий в состав модуляторов, изображенных на фиг. 5-8; на фиг. 10 графики зависимостей, реализуемых
двумя нелинейными функциональными преобразователямиJ на фиг. 11 зависимость, реализуемая одним линейным преобразователем; на фиг. 12реализация зависимостей, показанных
0 на фиг. 10 при помощи аналоговой аппаратуры, на фиг, 13 - то же, приведенных на фиг. 11.
Функционально-принципиальная схё,ма примера выполнения устройства
5 содержит объект -управления 1 - с компенсацией емкостей токов, связанную с модулятором 2 Параметра КНПС, выполненного например, в виде резистора, включенного.в нейтQ раль сети последовательно с КР и соединенного с тиристорным ключом (фиг. 5) ,
Вход модулятора 2, со ошнен с выходом генератора 3 поисковых и опорных сигналов. Напряжение (t) смещения нейтрали, обозначенное через X|{t)i подано на вход датчика 4 . ряжения смещения нейтрали. Ток (t) компенсирующего реактора, обозначенный через x-j(t), подан на вход датчика 5 тока КР. Выход датчика 4 напряжения смещения нейтрали подключен ко входам полосовых фильтров 6-7, настроенных на комбинационные частоты, равные соответственно 60 + Я
5 и Q -Л , где со - частота сети, а 2 - частота поисковых сигналов. Выход датчика 5 тока КР подключен ко входу полосового фильтра 8, настроенного на частоту СО . Выходы полосовых фильтров 6-8 соединены с входами релейных усилителей 9-11, выходы которых подключены к входам множительных звеньев 12, 13. Другие входы множительных звеньев
5 соед1 нены с выходом генератора 3 поисковых и опорных сигналов. Выходы множительных звеньев 12, 13 подключены через фильтры 14, 15 низких частот к входам функциональных преобразователей 16, 17, выходы которых соединены с входами сумматора 18. Выход сумматора 18 подключен к входу астатического исполнительного органа 19 КР,
Структурная схема (фиг, 2; периодически нестационарного объекта управления содержит нелинейные звенья 20, 21 и 22, 23 с передаточными .функциями
° JWe(D.L.|lr5e(0.l,VQ(tD,L|), (i)
и Ng(D,L.).Q4DX,), г 1.2, множительные
звенья 24, 25, линейные стационарные звенья 26,. 2.7 с передаточной функциейОЧзЗД. ,f) и cy пv aтopы 28 и 29. Здесь Э 1 |dt. - оператор дисрферен цирования; L - нндуктавность компенсирующего реактора f , i вектор параметров объекта управлени (КНПС) с координаташ5 Р- - актив ное сопротивление нейтрали, суммарная активная проводимость изо ляции сети f (5 е - сурдма §ная ем: кость КНПС.. Операторы5e(p,L,f) HQiO,L,|) представляют собой операторы-полино мы ..медленно меняющимися параметра ми , передаточная функция е(Д.,) .объекта управления 1 связывает вход Тц Ult - ток несимгдетрии сети, с выходной координатой Kelt),2 -(Л J x(t)WeiD.L,iUuW) (2) te Дифференциальный оператор Hg(D,L,,) имеет следующий вид ,yD,L) OtDJ.,|).9f3 p5giD,L,f)-5g(D.L,l 3lal|pQlD,L). (3): Значение индекса В 1 в призеденных.выражениях и далее означает у что выражения записаны для случая, когда в качестве выходной координаты Xe-W объекта управления выступает напряжение t(t) смещения нейт рали (T,e,f например, X, (t) Р (t)) значение означает, что упомянутые выражения записаны для случая, когда выходной координатой X (t) является ток Л: (t) через компенсирующий реактор, т.е, х.,{ t) 3(t). . -5 На фиг, 3 кривая 30. изображает зависимость модзлля часто.тной карактеристики/(5СО)1 ,f)/объекта 1 на частоте о , кривые 31, 32, 33 представляют со.бой зависимости от индуктивности L аргументов (w,L|) ,(o.L.(4w,b,l) -ar QiJQ4Ja,L,|,cf(-(«-.L,|) -argQ(jW-JQ, соответственноj кривые 34, 35, 36 иллюстрируют соответственно з.-ависхЬ; мости сигналовll U (,L,V)(«-S,L,g) (L,y lJV-ur на выходах звеньев 14 15, 18. Кривая 37 ка фиг. 4.изображает график зависимости параметрического управления . или U от и P разностей фаз сигналов Z, а также 2 и EQ , поступающих на мно жительные звенья 12, 13, На фиг о использованы следующие обозначения; силовой или присоединительный трансформатор с выведенной нулевой точкогЧ 38, компенсиурющий реактор 39, резистор 40. Модуля торы 2 активного сопротивления, включенного последовательно с КР (фиг.5), индуктивности КР (фиг 6), суммар- ной активной проводимости изоляции сети (фиг. 7) и суммарной емкости сети (фиг. 8) содержит в качестве общего элемента тиристорный ключ (ТК) 41. Кроме того, .в состав модулятора 2 г1ктивного сопротивления (фиг, 5) входит резистор АО, в состав модулятора 2 индуктивности КР (фиг. 6) - дроссель 42; в состав модулятора 2 суммарной активной проводимости (фиг. 7) - резистивный делитель на резисторах 43 и 44; в состав модулятора 2 суммарной емкости (фиг.. Bj - емкостный делитель на конденсаторах 45 и 46. Тиристорный ключ 41, пример которого показан на фиг. 9, содержит пару встречно-паргшлельно включенных тиристоров 47-48, диоды 49-50, шунтирующие управляющие переходы тиристоров 47-48 при протекании тока в обратном направлении, и реле 51, контакт К которого включен мелсду управляющими переходами тиристоров 47 и 48.. На фиг. 10 кривые 52 и 53 изображают зависимости, реализуемые соответственно функциональными преобразоватeля ш 16 и 17 в случае коррекции системы двумя нелинейностями. На фиг. 11 кривая 54 изображает зависимость, реализуемую функциональным прео ,разователем 17 в случае ко.ррекции системы одной нелинейностью, т.е. при линейном .звене 16. Пример технической реализации функциональных преобразователей 16 и 17 при помощи аналоговой техники показанный на фиг. 12, включает в себя операционный усилитель 55 с ргзистором 56 в цепи обратной связи. Нелинейная входная цепь операцион-. ного усилителя 55 состоит из резисторов 57-75 и диодов 76-83. Данные преобразователи предназначены дл-я реализации функциональных зависимостей 52-53 в соответствии с фиг. 10. На фиг. 13 изображен пример технической реализации функционального преобразователя 17 в случае реализации им зависимости 54, приведенной на фиг. 11. Он включает в себя операционный усилитель 84 с входным резистором 85 и нелинейной цепью обратной связи, которая, в свою очередь, состоит из резисторов 86-92 и диодов 93,94. Рассмотрим работу устройства, функционально-принципиальная схема которого изображена на фиг. 1. Генератор 3 поисковых и опорных сигналов вырабатывает периодические колебания с ча.стотой 52 , сообщаемые модулятором 2, некоторому параметРУ.р . Модулируемым параметром р , в оицем случае может быть как индуктивность 1, КР, так и компоненты вектора {,,г ,Ц rfj 8 суммарная проводимость активных утечек или .з, - суммарная емкость сети. В рассматриваемом примере модулируемым параметром является активное сопротивление R нейтрали т.е.р. , R . Подобная модуляция может быть осуществлена, например при помощи периодического шунтирования тиристорным ключом 41 резистора 40, включенного последовательно с дугогасящим реактором 39 (см. фиг. 5). Модуляция других пара метров сети может быть осуществлена например, в соответствии, с фиг. 6-8 Тиристорный ключ 41 может быть выпол нен , например , по схеме, показанной на фиг. 9. Данный ключ 41 замыкается при замыкании контакта К реле 51 благодаря протеканию тока, возникаю щего при. замыкании контакта К, чере управляняций переход того тиристора Д47 или 48) , который должен быть открыт на I данном полупериоде часто ты сети, и через диод (49 или 5Л), шунтирующий управляющий переход про тивоположного тиристора. При размы- кании контакта 52 ток в цепях управ лякндих переходов тиристорюв 47 и 46 не возникает; и тиристорный ключ 41 остается разомкнутым. -Периодическая Модуляция параметров контура нулевой последовательности сети приводит к возникновению в напряжении l(t) (смещения нейтрали) ив токе l(t) компенсирующего :реактора гармонических составляющих с комбинационными частотами (О ffi. Фазовые сэдв.иги комбинационных гармоник содержат информацию о резонан ном состоянии кнпс. Поясним сказанное в терминах структурной схемы периодически.нестационарного объекта 1 (фиг. 2). На вход объекта 1 действует сигнал I(t} в виде тока несимметрии: In(t) I costot. Сигналы fe(t), 1 - 1, 2 на выходах звеньев 21, 25 описывсиотся следукяцим вырс1жеиием: 1еW BgCosCwt4 Jt j).,е гi,2 (4) где :Bj«l.lNjtiw,L.)|.lQl5o,l,rV, ,Cw,b.f) a, Hftjo,L.y, Qi.jw.L,i)i Nj (5Ч1,)-комплекснрзначные величины, соответствующие оператоpaMQ,(0,L,f)HNe(D.l,,| е 1,2 при замене D на jw. Пёремножение.гармонического сигнала|е1Ь), б и периодического поискового сигнала видаlS pW-A6«gnco3(at + ety множительными звеньями 22, 26 дает сигналы с комбинационными частотами ((о ±0). эти сигналы проходят через звенья 23, 27 с одинаковой передаточной функциейО(1, U,1) , представ.ляющей собой, согласно выражению (1), знс1менатель передаточной функции, резонансного объекта управления 1, и преобразуются к виду 1 гг;со5Ки ЬА.)14я;,14 )it,l, (5) S vr ; .S8g-A|qij(olihQ,U,i,2H.2. Зависимости аргументов |(,) иqгqJrq {l7C)чacтoтныx характеристик звеньев 23, 27 от.1/ компенсатора, охарактризованы ранее (см. фиг. 3 кривые 32, 33). Именно указанные фазовые сдвиги q(u5tQ.,L), приобретаемые комбинационными гармониками при прохождении через звенья 23, 27, в предлагаемом устройстве несут информацию о-состоянии объекта управления. Они выделяются при помощи датчиков 4, 5 и полосовых фильтров 6-8, релейных усилителей 9-11, множительных звеньев 12, 13 и служат в дальнейшем для формирования сигнала U управления исполнительным органом. Полосовые фильтры 6,7 выделяют из выходного сигнала датчика 4, пропорционального напряжению в(t) X«(t) , гарьюники с частотами и + + Л и ы- --П , а полосовой фильтр 8 выделяет гармонику с частотой Q из выходного сигнала датчика 5 т,оKa3(t)X2(t). Амплитуды сигналов на выходе полосовых фильтров 6-8 стабилизируются релейными усилителями 9-ilсо стабильными уровнями Н ограничений. В этом случае выходные сигна-, JHjZ(t) ,Z(b) ,2olt)релейных усилителей 9, 10, 11 имеют следующий вид .. znt)).,eci,/zW s oUbHsign cos Coal ,) где г--V ..1Д , , рд - неизменные, во времени фазовые сдвиги, вносимые полосовыми фильтралш 6, 7, 8 на ча стотах и) +Л, iO-T. соответственно. Указанные сигналы поступают на входы множительных звеньев 12, 13, где перемножаются между собой и с опорным сигналом ZjjW. + fi) (S} и формируют на выходах сигналы Y (t) (i) равные / - (i)2:(t).(t).znt) (g) m)4Zu 4-2ottO- Mt:). (fo) Фаза (3 опорного CHraanaZgCt) мож изменяться при помощи фазосдвигающего устройства, входящего в соста генератора 3 поискорого и опорного сигналов. Произведения сигналов в квадрат ных скобках соотношений Дэ) , /(Ю) образуют по отношению к2;(1) и Z(t) обобщенный опорный сигнал следующе го вида 2.aW-Zol.t) 0,b(iHcos(w + Sl)l 4 ,5bjjHcos Cu-«l)t)+ +cf -|VJ40,5b,2H 1: - 2K 1 oosL(2K4il o3t 4, + ц,д) f p, 1-cos IX К M У«х(Ы4й°4Су„ Л.Ь. (ii) Сигнал (11) состоит из двух основ ных гармоник и высокочастотного хвоста, который не оказывает существенного влияния на процесс образования постоянной составляющей на выходе множительных звеньев и ПО этой причине в дальнейшемне учитывается. Опорный гармоникой к сигналу Z ( является первое слагаемое выршкения (It), а-пр отношению к сигналу Z(t второе. Полезные неколеба тельные) составляющие (i , получаемые из сигналовY(t) при помощи фильтров 14, 15, равны lJ- 0,25wXcQSCp-,i {и) - где 9(4 gt«t4cj,- + (;ig-c -(fot р. Как видно из (12) , сигналы иии пропорциональны разности фаз участвовавших в Перемножениях СЗ), (10) сигналов. При соответствующем выпол нении полосовых фильтров б, 7, 8 когда Cf.()o (.13) и выборе фазы опорного сигнала25г(1) равной фаае об поискового сигнала , т.е. fli /5(14) перечисленные фазы, входящие в выражение (12) , взаимно уничтожаются. Нестационарные же фазы и dg , зависящие от параметров объекта управления и в общем случае играющие, роль помех, в рассматриваемрм случае, т.е. при модуляции параметра, R и при выделении комбинационных гармоник с частотами (со +Й) и ( W -Я) из координаты хДЬ б() , T.e. , см. (6). ,. а гармоники с частотой 05 - из координаты ) О U) , (т.е.бе 62 , см. (7)) , не зависят от параметров КНПС и тождественно равны нулю (T-.e.S)4 2 о) . Таким образом, ri- указанном случае . (15) и сигналы У и (J зависят только от информационных фазовых сдвигов ( и Q . Как видно из выражения (12) и графиков 32, 33, 37, зависимости U (L) и Utli) имеют вид, показанный на фиг. 3, кривые 34, 35. Суммирование сигналов ина сумматоре 18 во многих случаях обеспечивает формирование удовлетворительного сигнала управления и приводит к достижению цели изобретения. Действиетльно, приведенный на фиг.З (кривая 36) график зависимости сигнала управления, построенный для случая (, lJ-k U%k-U, . (16) когда функциональные преобразоратели 16, 17 яззляются простыми линейными делителями напряжения, и при достаточно низких поисковых частотах, пересекает ось L вблизи резонансного значения, имеет положительный знак до резонанса и отрицательный после него. Полученный сигнал управленияи(Ь} , будучи поданным на вход астатического исполнительного органа 17, обеспечивает: во-первых, близкую к резонансной настройку КНПСГ во вторых, неплохую форму управляющей характеристики, придающую систе- ме улучшенные динамические свойства. Аналогичного результата можно достичь при модуляции активной проводимости изоляции сети (т.е. например, при помощи периодического коммутирования тиристорным ключом резистора, включенного параллельно КР (см. фиг. 7). Причем, выделять комбинационные гармоники с частотами W + SZ и Q -П следует теперь из координаты х (t) Л (t) (т.е. ), а гармонику с частотой (О - из координаты X, (il . K(t),CT.e.g 6), подключив ко входам б и 7 выход датчика 5 тока 3(t) через КР, а ко входу фильтра 8 - выход датчика 4 напряжения бС) Смещения нейтрали-. При описанном выборе модулируемого параметра и выходных координат управляемого объекта 1,.все приведенные выше соотношения, иллюстрирующие работу устройства, имеют тот же самый смыс Выражение для i, , входящее в (12 в этом случае равно (4- 2ieC+q--6,- iЧй f Из того обстоятельства/ что в ра сматриваемом случае -92 s6 arct(cjl./p следует, что при сохранении условий (13) , (14) , (т.е. при равенстве стационарных фаз tf Ц ° и при «t р) , величина Ф ) , а сигналы И , U и U зависят только от информационных фазовых сдвиговс) Линейное суммирование (в сумматоре 18) величин и и U дает зависи мость U(L) , приведенную на фиг. 3 (кривая 36). Следует отметить, что более пред почтительной является все же модуля ция параметра р R из-за простоты .технической реализации и возможноети совмещения функций модулятора параметров с устройством компенсации активной составляющей. I , Модуляция индуктивности L КР при структуре устройства, показанной на фиг. 1 или модуляции емкости С КНПС при подаче на входы фильтров б и 7 выходного сигнала датчика 5 тока 3 (i КР и на вход фильтра 8 - выходтзго сигнала датчи ка 4 Напряжения 6 (t) , смещения нейтрали ,менее эффективна, так как сопря жена с явлением наведенной (паразитной) модуляции И: вследствие это го с ухудшением условий для точной настройки объекта управления на резонанс при повышенных частотах поис ка. Иной выбор выходных координат также ведет к снижению точности вследствие влияния нестационарных фаз бе точность настройки. Однако в ряде случаев, и, в частности,при относительно невысоких частотах поиска и низкой добротности КНПС, фазы cie/ достаточно ста бильны и могут быть скомпенсированы соответствующим подбором фаз % , Я вносимых полосовыми фильтрами 6-8, а также разностью фаз ct -ft между поисковыми и опорньом сигналами. Более того, в указанных случаях на входы всех трех полосовых фильтров 6-8 могут быть поданы только лишь напряжение 6(t) смещения нейтрали или ток О (i) компенсирующего реактора. Во всех рассмотренных устройствах, т.е. когда сигналы U и U на выходах фильтров низкой частоты 14, 15 зависят только от информационных фаз CJ и (| , а управление U получено (в соответствии с выражением (16/) линейным суммированием в .. сумматоре 18 этих сигналов, настрой ка индуктивности КР осуществляется 1ДО значения . o-4R M/ c(). Полученное значение LO по сравне2нное значение I нию с резонансным значением зонансным значе iLp4R H)/(c(o) (f7) имеет погрешность из-за Я. 0. Погрешность становится существенной при $Z CJ /4 . Определенного повышения точности при повышенных частотах поиска можно добиться выбором различных коэффициентов k -и k передачи функциональных преобразователей 16 и 17. Для того, чтобы добиться точной ((в смысле выражения (17)) настройки на резонанс при повышенных частотах звенья 16 и 17 следует выполнить в виде нелинейных преобразователей, корректирующих сигналы U и U . При этом сигнал управления U астатическим исполнительным органом 19 имеет вид . и-гЧиМ г(и-), с/з; где(и) и F(U) - J yнкциoнaльныe . завиЬимости, реализуемые функциональными преобразователями 16 и 17/ соответственно. ХарактеристикиF(U) могут быть синтезированы, например, .следующим образом. I F(U)k ct oirccos(k4U-) , (/( гдe|l 4Й|(н%д)иkulj eK Ь что следует из выражения {(12) , а коэффициенты k выбираются из- соотношения -Яk. (20) , (и-Л. Графики функционаипьных зависимостей (19) показаны на фиг. 10. При этом кривая 52 изображает зависимость F(U), а кривая 53- зависимость F(U) . Так как фазовый угол(| (arcd| R +Mc((Ji af .()(coi V то подставляя (12), (19). в (18) можно получить управление вида l)n(o(RgH-LCu)|( (21) Легко видеть, что нуль управления (21) соответствует LO Lp в полном согласии с (17) , полярность управления при L f Lp способствует движению КНПС в точку резонанса. Выражение (21) не содержит частоты Q поискового сигнала и, следовательно, точность настройки на резонанс не зависит от частоты поиска. Данное обстоятельство можно использовать длк повышения помехоза щищенности, выбором оптимальной час тоты поиска в зоне относительна затишья шумов. Повышение частоты поисковых сигналов, кроме того, поз воляет повысить быстродействие устройства при использовании быстродей ствующих исполнительных органов 19 таких как КР с подмагничиванйем или КР с тиристорным переключением ответвлений. В зоне резонанса зависимость управляющей характеристики U(U) , согласно выражению (21) , им ет близкий к линейному характер. Уровень сигнала управления не снижа ется даже при значительных растройках резонанса КНПС, что позволяет избежать возможного размыкания контура самонастройки вдали от резонанса в системе с плунжерным компенсирующим реактором. Это приводит к устранению характерного для прототипа ограничения на расширение ;.-. зоны нечувствительности исполн тель ного органа 19. Ширина зоны можеш выбираться теперь из соображенной улучшения качества процесса самонастройки (минимизации числа переключений привода) при сохранении задан ной точности. Улучшение качества пе реходного процесса и.связанное о этим дополнительное повышение быстродействия системы достигается и с другими типами КР, Причем/ операция коррекции динамических характеристик системы существенно упрощается, поскольку при наладке не тр буется подстройка параметров коррек . тирукяцйх сигналов. Аналогичного результата по точности резонансной настройки по улучшению помехозащищенности и повьааению быстродействия можно достичь также, если применять в качестве функционального иреобразовахеля 18 линейный делитель напря жения с некоторым коэффициентом ( f а в качестве функционального преобразователя 16 использовать зависи.мость вида, F4u)0,«k H bQCOsj (o rcdgikct(arccoek,))), 422} где величина определяется из выражения (20) . j , Зависимость (22) изображена на фиг. 11 (кривая 54). Данная функциональная зависимость. (22J легче реализуется на аналоговой аппаратуре фиг. 13) , чем функциональная зависимость, вида (19) , (см. фиг. 12). Поэтому системы с корректирующими нелинейностями вида (19) целесообразно использовать при цифровой реализации устройства, а системы с нелинейностью вида (22) - при его аналоговой реализации. Управляющая характеристика U(L) системы, скорректированной при помощи функционального преобразователя 16 вида (22) , показана на фиг. 3 (кривая 36) . Монотонный характер данной кривой сохраняет упомянутые вьоше возможности улучшения качества переходного процесса в случае использования КР .плунжерного типа. Улучшение динамики самонастройки наблюдается также и с другими типами КР... Таким обрааом, применение данного регулятора в системах компенсации токов однофазных замыканий на землю повышает точность настройки на резонанс кНПС. Вследствие полной независимости ее от частоты поисковых сигналов во всем диапазоне изменения параметров объекта упрощается наладка при переходе на сети с большей емкостью. Расширение диапазона рабочих частот поиска способствует улучшению помехозащищенности и возрастанию быстродействия процесса резонансной настройки в системах с любыми компенсирующими реакторами. чI Автоматический регулятор, рассмотренный в качестве примера, более прост в реализации, чем известное устройство и не нуждается в какойлибо настройке при установке на объекте, кроме выбора требуемой поисковой частоты;$1. Все это создаёт лучшие возможности широкого использования автоматических регуляторов компенсации емкостных токов в сетях напряжением до 35 кВ включительно.
Sip
f
(
- 7
.r(/;
3№:
/ff
Ю
r
;;«.
U
17
2o
I/
13
. 




| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической настройки компенсации емкостных токов в электрических сетях | 1984 |
|
SU1257745A1 |
| Измеритель и всережимный автокомпенсатор токов однофазных замыканий в воздушных,кабельных и смешанных сетях | 1987 |
|
SU1443079A1 |
| Устройство для автоматической настройки компенсации емкостных токов в кабельных сетях с дугогасящим реактором | 1984 |
|
SU1229898A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| Автоматический регулятор резонанс-НОгО СОСТОяНия КОНТуРА НулЕВОйпОСлЕдОВАТЕльНОСТи СЕТи | 1979 |
|
SU813585A1 |
| Устройство для автоматического регулирования токов компенсации в режимах однофазного замыкания на землю | 1984 |
|
SU1257741A1 |
| Устройство для автоматической настройки компенсации емкостного тока однофазного замыкания на землю в электрической сети переменного тока | 1978 |
|
SU748620A1 |
| Способ компенсации токов однофазного замыкания в трехфазной сети с дугогасящим реактором в нейтрали | 1984 |
|
SU1264263A1 |
| Устройство для стабилизации резонансного состояния контура нулевой последовательности в сети с компенсированной нетралью | 1979 |
|
SU860207A1 |
| Устройство управления дугогасящим реактором с изменяемым воздушным зазором | 1988 |
|
SU1541707A1 |




ПОИСКОВЫЙ РЕГУЛЯТОР ДЛЯ РЕЗОНАНСНОЙ НАСТРОЙКИ КОНТУРА НУЛЕВОЙ ПОСЛЕДОВАТЕЛЬНОСТИ СЕТИ, содержащий генератор поискового и опорного' сигналов, первый выход которого соединен с входом модулятора параметра объекта управления - контура нулевой последовательности сети, а второй выход подключен к первым входам первого и второго множительных звеньев, первый и второй релейные усилители, выходы которых соединены с вторыми входами первого и второго множительных звеньев соответственно, первый и второй фильтры низкой частоты, в.ходы которых подключены соответственно к выходам первого и второго множительных звеньев, последовательно соединенные сумматор и астатический исполнительный орган компенсирующего реактора, отличающийся .Т€м>& что, с целью повышения точности, улучшения динамических свойств и упрощён~йя наладки, оно снабжено датчиком напряжения смещения нейтрали, датчиком тока компенсирующего реактора, двумя полосовыми фильтрами, настроенными на частоты, равные соответственно сумме и разности частоты сети и частоты поисковых сигналов j^ третьим полосовым фильтром, настроенным на частоту сети, третьим релейным усилителем и двумя функциональными преобразователями, а модулятор параметра объекта управления выполнен или в виде резистора, включенного последовательно с компенсируквдим реактором или в виде резистора, включенного параллельно компенсирующему реак- • тору, причем при выполнении модул!Н- тора параметра объекта управления из резистора, включенного последовательно с компенсирующим реактором, входы первого и второго полосовых фильтров подключены к выходу датчика напряжения смещения нейтрали, вход третьего полосового фильтра подключен к выходу датчика тока компенсирующего реактора, а при выполнении модулятора параметра объекта управления из резистора, включенного параллельно компенсирующе»- му реактору, входы первого и второго полосовых фильтров соединены с выходом датчика тока компенсирующего ^реактора,, вход третьего, полосового фильтра подключен к выходу датчика напряжения смещения нейтрали, выходы первого, второго и третьего полосовых фильтров соединены соответ* ственно с влодами первого, второго и третьего релейных усилителей, выход третьего релейного усилителя подключен к третьим входам множитель^, ных'звеньев, а выходы пе(>&вого и второго фильтров низкой частоты соединены соответственно через первый и второй функциональные преобразователи с первым и вторым входами сумматоров.(ЛсэXTэND:^
Ф(Ф-)
laHS
г.6
Г
фиг.7
Ы.8
Л
гГ 4/
Г
Л
Фиг.Ю
-QS
0.5
U
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматической настройки дугогасящей катушки в кабельных сетях | 1961 |
|
SU150156A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Н 0.2 Н 9/08, 1972.3.Авторское свидетельство СССР »' 813585, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
