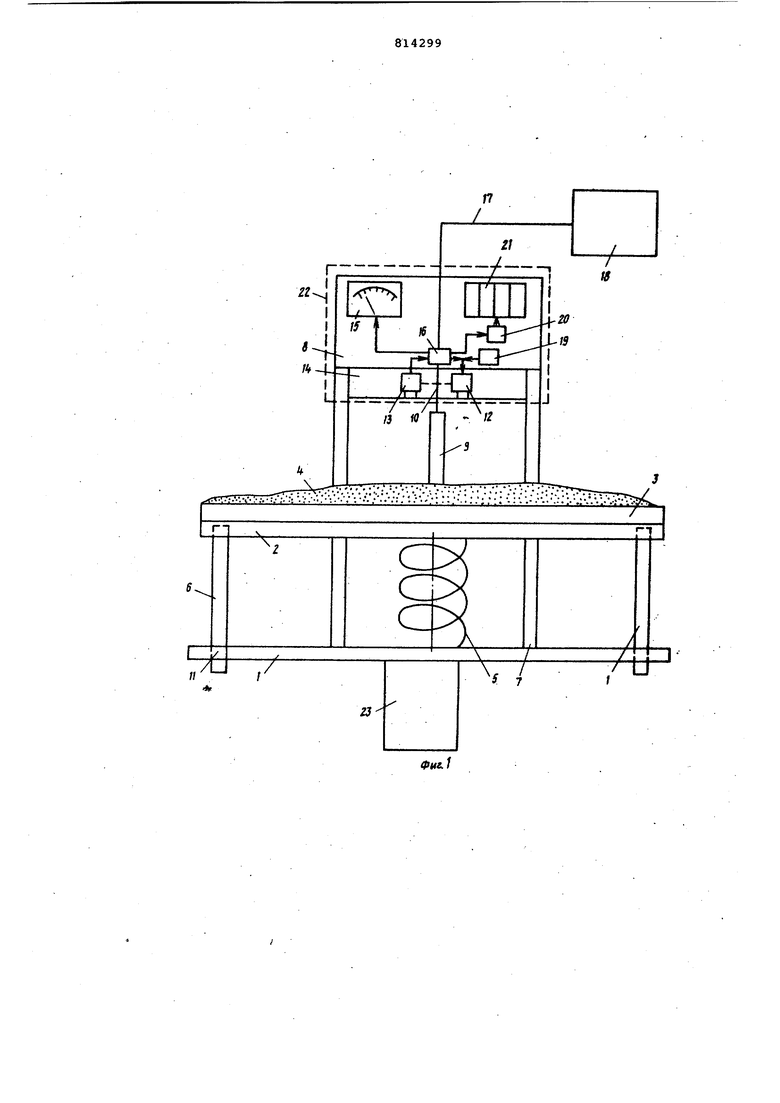
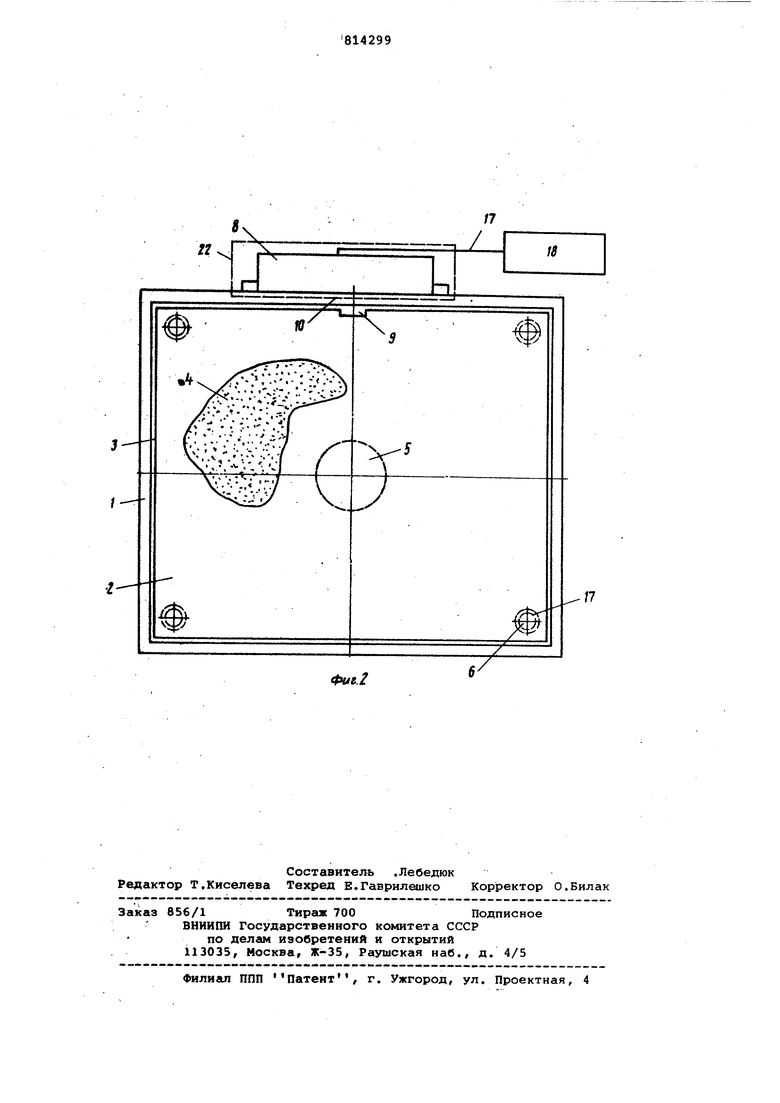
Изобретение относится к рыборазведению, в частности к устройствам для кормления рыбы и контроля за пое даемостью корма. Известно устройство для кормления рыбы и контроля за поедаемостью корма, содержащ« е платформу для корма, корпус и размещенные в нем источник излучения, фотоприемник с электрической системой регистрации фототока Однако в известном устройстве величина попадающего на фотоэлемент светового потока зависит от ос тающегося после поедания корма, т.е. при одном и том же количестве карма, находящегося на матовом экране, величина светового потока, проходящего на фотоэлемент будет различна, так как световой поток будет преломляться на поверхности корма в зависимости от формы поверхности, следователь но и различна величина фототока,что приводит к значительной неточности в определении поедаемости корма.Кроме того, между источником света и фотоприемником кроме корма могут находиться и другие предметы, например рыба, затонувшие куски древесины, плавающий ил, что в свою очередь так же приводит к неточности контроля поедаемости корма. Цель изобретения - повышение точности контроля за поедаемостью корма. Поставленная цель достигается тем, что оно оснащено диафрагмой, вертикально установленной между источником излучения и фотоприемником и соединенной с платформой посредством штанги, и плитой с вертикгшьньвли направляющими, при этом корпус размещен над платформой для корма, а последняя смонтирована на вертикгшьных направляющих плиты при помощи упругого элемента. На фиг. 1 изображено устройство, вид сбоку; на фиг. 2 - то же, вид сверху. Устройство содержит плиту 1 и размещенную над ней платфор 1у 2 с бортиками 3. На платформе 2 помещен корм 4. Упругий элемент, например пружина 5, расположен между плитой 1 и платформой 2. Устройство для контроля за поедаемостью корма снабжено четырьмя цилиндрическими вертикальи1 «и напра ляклцими 6, штангами 7 для жесткого крепления щитка 8 с плитой 1. Штаига 9 жестко закреплена с платформой
2. На верхнем конце штанги 9 закреплена диафрагма 10. Направляющие б при помощи резьбы или потной посадки жестко закреплены в платформе 2. В плите 1, периметр которой больше периметраплaтфop вл 2, имеются соответственно четыре отверстия 11, в кц«врых по скользящей посадке закреп-%. лены направляющие 6, с возможностью перемещения, которые служат для предупреждения резкого перекашивания платформы 2 при неравномерном расположении на ней корма 4.
На щитке 8 расположены источник 12 света, фотоприемник 13, которяле помещены в светонерпоницаемый корпус 14. Далее на щитке 8 расположен стрелочный прибор 15 индикации фототока от фотоприемника 13, общий электрический разъем 16, служащий для подключения внешнего источника тока, а также системы внешней регистрации фототока при помощи кабеля 17 на пульте 18 оператора. Щиток 8 также снабжен источником 19 автономного питания, системой 20 электронных пороговых схем, соединенных с индикаторными лампочками 21. Щиток 8 с расположенными на нем узлами закрыт предохранителями от внешних воздействий легким корпусом 22, стенки которого по крайней мере со стороны наблюдения за приборами выполнены из прозрачного материала, например оргстекла.
Все устройство крепится в водоеме при помощи плиты 1 на свае 23 или иным образом, чтобы щиток 8 располагался над водой.
Устройство работает следующим обрзом.
При загрузке платформы 2 кормом 4 пружина 5, находящаяся между плитой 1 и платформой 2 сжимается и платформа 2 опускается вниз в направлении плиты 1, которая неподвижна, Вместе с платформой 2/ посредством штанги 9, диафрагма 10 также опускается вниз. Свет от источника 12 света попадает на фотоприемник 13 и в цепи фотоприемника 13 течет ток. По мере съедания корма, при помощи пружины 5 платформа 2 и, следовательно, штанга 9 с диафрагмой 10 двигаются вверх. При этом диафрагма будет постепенно уменьшать величину светового потока, поступающего от источника 12 света на фотоприемник 13, например фотодиод. Ток в цепи фотоприемника 13 будет изменяться, т.е. уменьшаться. По величине тока, регистрируемого прибором 15 можио с большой точностью контролировать поедаемость корма рыбой. Прибор 15 градуируют
при помощи известных весовых единиц, поочередно погружаемых на платформу 2 в единицах веса корма.
Можно применять дискретную сигнализацию количества съеденного корма. В этом случае в цепь фотоприемника 13 включается система 20 пороговых схем, порог срабатывания которых устанавливается различным в зависимости от величины фототока, например для значений фототока, соответствующих наиболее интересующим порциям съеденного корма. Результат считывается с индикаторных ламп 21.
Контроль за поедаемостью корма можно осуществлять как со щитка 8,расположенного над водой, так и пульта 18 оператора на любом расстоянии, от кормушки.
Для уменьшения расхода электрическоЯ энергии устройство может быть снабжено реле времени, включающее электросхему регистрами на определенный промежуток и в определенное время. Часть конструкции устройства находящаяся в воде может быть выполнена из материалов нейтральных к воде, корму и рыбе - полиэтилен, капрон.
Таким образом, предлагаемое устройство позволяет с высокой точность и оперативно контролировать степень поедаемости корма/ так как показания приборов зависят только от количества корма, а не от каких-либо других факторов, например формы .норма.
Формула изобретения
Устройство для кормления рыбы и контроля за поедаемостью корма, включающее платформу для корма, корпус и размещенные в нем источник излучения, фотоприемник с электрической системой регистрации фототокаf отличающееС я тем, что, с целью повышения точности контроля за пседаемостью корма, онс оснащено диафрагмойf вертикально установленной между источником излучения и фотоприемником и соединенной с платформой посредством штанги, и плитой с вертикальными нап1 авляющими, при этом корпус размещен над платформой длякорма, а последняя смонтирована на вертикальных направляющих плиты при помощи упругого элмента.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке 2510510/28-13, кл. А 01 К 61/00, 1977.
ZZ
rrrrr /
n
L
Л
,/
/
Фие.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля за поеданием корма рыбами | 1977 |
|
SU733587A1 |
| Устройство для кормления рыбы и аэрации воды в рыбохозяйственных водоемах | 1984 |
|
SU1253552A1 |
| СПОСОБ КОНТРОЛЯ СТЕПЕНИ АДАПТАЦИИ СВЕТОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ И КОНТРОЛЬНО-ПРОВЕРОЧНЫЙ ПРИБОР | 2013 |
|
RU2540447C1 |
| Система автоматического кормления рыбы | 1978 |
|
SU766552A1 |
| ПОРТАТИВНЫЙ ПРИБОР КОНТРОЛЯ И ИЗМЕРЕНИЯ ВОЗВРАТНО-ОТРАЖАЮЩЕЙ СПОСОБНОСТИ СВЕТОВОЗВРАЩАЮЩИХ ИЗДЕЛИЙ | 2005 |
|
RU2302624C2 |
| КОРОТКОБАЗНЫЙ ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ВОЗВРАТНО-ОТРАЖАЮЩЕЙ СПОСОБНОСТИ СВЕТОВОЗВРАЩАЮЩИХ ИЗДЕЛИЙ | 2005 |
|
RU2311631C2 |
| Устройство для кормления рыбы и контроля за поедаемостью корма | 1985 |
|
SU1242085A1 |
| Устройство для оценки качества пищевых продуктов | 1977 |
|
SU734559A1 |
| Фотоэлектрический измеритель перемещений вращающихся деталей | 1980 |
|
SU1004752A1 |
| СПЕКТРОАНАЛИЗАТОР1;:;г'Е:н*я•( L | 1972 |
|
SU351091A1 |