бака с патрубком в днище, при этом связь с основньм насосом осуществлена через гибкий шланг, подключенный к баку.
3, Устройство по п.1, отличающееся тем, что в корпуИзобретение относится к рыбоводству, а именно к устройствам для кормления рыбы и аэрации воды в рыбоводных водоемах, и может быть использовано в хозяйствах, занимающихся выращиванием рыб в промьшлен- ных масштабах.
Цель изобретения - улучшение условий кормления и содержания рыб и обеспечение кормления рыб в соответствии с их биологическими особенностями.
Использование устройства позволяет повысить эффективность рыбоводных хозяйств, так как оно повышает уровень механизации и автоматизации процесса кормления рыб, снижает расход искусственного корма и сохраняет его качество за счет внесения корма малыми порциями в течение суток. Кроме того, устройство улучшае кормовую базу водоема путем привлечения к местам кормления насекомых и способствует отпугиванию хищных птиц от мест кормления.
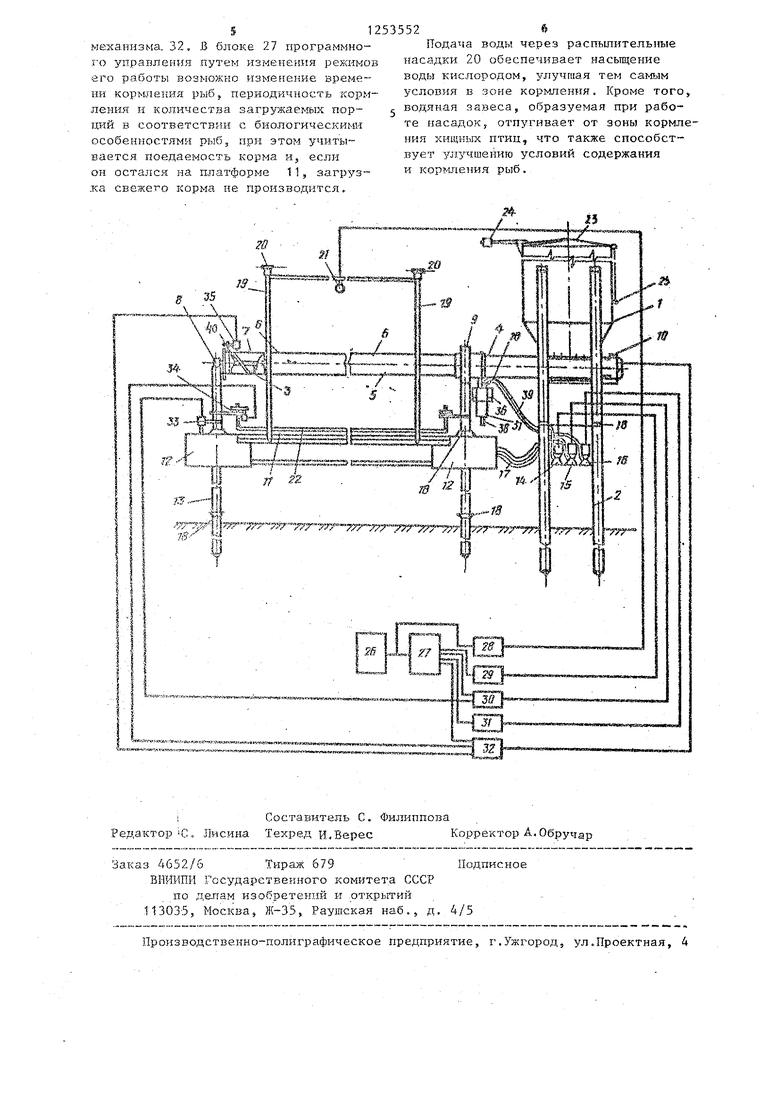
На чертеже изображено предлагаемое устройство, общий вид.
Устройство для кормления рыбы и аэрации воды в рыбохозяйственных водоемах состоит из бунке ра 1 для корма, установленного на сваях 2, и шнека 3 для вьщачи корма, заключенного в корпус, состоящий из двух половин-жестко закрепленной (неподвижной) 4 и подвижной 5, последняя из которых имеет две крышки - основную 6 (большего размера) и дополнительную 7 (меньшего размера). Подвижная часть 4 корпуса установлена в подшипнике 8 скольжения и роликовом подшипнике 9 и снабжена механизмом поворота на 180°, а шнек 3 имеет электрический привод 10. Ус ройство включает также кормовое мессе шнека в районе крышки меньшего размера установлен наклонный козырек для обеспечения контакта корма при полном заполнении корпуса с крышкой,, а последняя связана с датчиком заполнения.
то, представляющее собой платформу 11, смонтированную на двух сообщающихся между собой поплавках 12, которые укреплены с возможностью перемещения на сваях 13, и насосы 14--16, из которых два последних 15 и 16 связаны посредством гибких шлангов 17 с одним из поплавков 12, а насос 14 - с механизмом поворота. Для ограничения перемещения поплавков 12 по сваям 13 предусмотрены стопорные кольца 18. На платформе 11 закреплены вертикальные трубы 19)сообщенные одними концами с полостями поплавков 12, а другими - с атмосферой и снабженные распьтительными насадками 20, установленными с возможностью вращения. Между трубами 19 в зоне действия насадок 20 размещен источник 21 света . Над платформой 11 на поплавках 12 смонтирована штанга 22, а бункер 1 для корма оснащен крьшткой 23 с противовесом 24 и стопором 25.
Устройство снабжено системой автоматического управления его работой, включающей датчик 26 освещенности, блок 27 программного управления, исполнительные механизмы 28-32, управляющие работой источника 21 света, приводов насосов 14-16 и приводом 10 шнека 3 соответственно, а также датчик 33 перемещения кормового места - платформы 11, датчик 34 наличия корма на кормовом месте - платформе 11 и датчик 35 заполнения кормом корпуса шнека 3, при этом датчики 33-35 могут быть выполнены в виде концевых выключателей.
Выход датчика 26 освещенности подключен к входу исполнительного механизма 28 и к входу блока 27 программного управления. Выходы последнего связаны с входами исполнительных ме3
ханизмов 28-32. Датчик 34 наличия кма и датчик 35 заполнения кормом корпуса шнека 3 связаны с блокирующими входами исполнительного механима 32, а датчик 33 перемещения кор- мового места - платформы 1i подключен к блокирующему входу исполнителного механизма 30.
Механизм поворота подвижной част 5 корпуса шнека целесообразно образ вать из противовеса 36 и бака 37, имеющего в днище патрубок 38 для слива воды, при этом бак 37 следует связать с насосом 14 с помощью шланга 39, Указанный механизм обес- печивает поворот подвижной части 5 на 180 вокруг горизонтальной оси. Для облегчения контроля дополнния корпуса шнека 3 кормом внутри него в районе крышки 7 установлен наклонный козьфек 40, обеспечивающий контакт корма с крышкой 6 при заполнении корпуса кормом, при этом крышка 7 связана с датчиком 35.
Работа устройства осуществляется следующим образом.
При наступлении световой части суток срабатывает датчик 26 освещенности, включая исполнительный механизм 28 и соединенньм с ним ис- точник 21 света, а также запуская блок 27 программного управления, который работает в старт-стопном режиме и осуществляет реализацию программы загрузки корма на платформу 11 через заданные промежутки времени. Количество загрузок может быть изменено путем переключения вручную режима работы блока 27 программного управления, управ- ляющего работой исполнительньгк механизмов 28-32 в заданной временной последовательности,
Рабочрш цикл разгрузки корма начинается с подъема платфор 11 путем откачивания воды из поплавков 12 насосом 15, Платформа 11 перемещается вверх до положения, ограниченного стопорными кольцами 18 При достижении этого положения срабатывает датчик 33, блокируется исполнительный механизм 30 и привод насоса 15 отключается. Если корма на платформе 11 нет, то штанга 22 и датчик 34 остаются на месте и исполнительный механизм 32 не блокирован, при поступлении сигнала от блока 27 програм шого управления
53
j10Т5 20
25
о Q
5
5
5524
он включает привод 10 шнека 3 и корпус последнед о заполняется кормом до момента срабатывания датчика 35,
После его срабатывания блокируется работа исполнительного механизма 32 и привода Ш, при этом подача корма прекращается. Затем включается привод насоса 14, подающего воду в механизм поворота и осуществляется поворот подвижной части 5 корпуса шнека 3 на 180 , при этом открывается крышка 6 и корм поступает на платформу 11. После выгрузки корма подвижная часть 5 корпуса шнека 3 возвращается в исходное положение. Подачу корма можно производить от одного до нескольких раз путем установки соответствующего режима работы блока 27,
При окончании загрузки корма на платформу 11 включается исполни- тельньш механизм 31 и привод-насоса 16, подагощего воду в поплавки 12 и тем самым опускающим платформу 11 до стопорных колец 18, В процессе последующего кормления рыбы посредством распылительных насадок 20 в зоне кормления создают водяную завесу, В ночное время подача корма прекращается путем возврата в исходное положение блока 27 программного управления. Включается источник 21 света и продолжается подача воды через рас- пьшительные насадки 20, при этом привлекаемые светом насекомые, попадают в водяную завесу и падают в водоем, становясь естественным кормом для рыб,
Выполнение механизма поворота, состоящим из Сака 37 с патрубком 38 и противовеса 36, позволяет использовать в качестве рабочего вещества воду, поступающую из насоса 14 по шлангу 39, При включении привода насоса 14 вода поступает в бак 37 и под действием его веса подвижная часть 6 поворачивается на 180, Обратный ее ход происходит за счет противовеса 36 при отключенном приводе насоса 14, так как в этом случае вода вытекает из бака 37 через патрубок 38,
Наличие наклонного козьфька 40 способствует контролю за наполнением кормом корпуса шнека 3, так как при заполнении корм по этому козьфьку 40 поступает к крьш1ке 7 и открывает ее, а поскольку крьш1ка 7 связана с датчиком 35, то последний срабатывает и блокирует работу исполнительного
механизма. 32, В блоке 27 программного управления путем изменения режимов его работы возможно изменение времени кормления pbi6, периодичносттз кормления и количества загружаемых порций в соответствии с биологическиш-г особенностями рыб, при этом учитывается поедаемость корма и, если он остался на платформе 11, загруз- jca свежего корма не производится.
Подача воды через распылительные насадки 20 обеспечивает насыщение воды кислородом, улучшая тем самым условия в зоне кормления. Кроме того, водяная завеса, образуемая при работе насадок, отпугивает от зоны кормления хищньгх птиц, что также способствует улучшению условий содержания и кормления рыб.
гв

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздачи кормов,внесения удобрений и аэрации воды в рыбоводных прудах | 1980 |
|
SU952182A1 |
| Устройство для раздачи корма рыбам в рыбоводных водоемах "карусель | 1982 |
|
SU1041084A1 |
| ЭКОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ АКВАКУЛЬТУРЫ И РЕКУЛЬТИВАЦИИ МОРСКИХ ВОД | 2011 |
|
RU2479996C2 |
| Кормушка для рыб | 1980 |
|
SU942641A1 |
| Устройство для автоматизированного кормления рыб | 1986 |
|
SU1387938A1 |
| СПОСОБ СТАШЕВСКОГО И.И. ДЛЯ ЛОВЛИ РЫБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2299564C2 |
| Устройство для кормления телят | 1981 |
|
SU1014548A2 |
| Кормушка для рыб | 1981 |
|
SU999995A1 |
| ДЕСАНТНЫЙ ТАНКОВЫЙ ПАРОМ | 2005 |
|
RU2296079C1 |
| Устройство для раздачи гранулированных кормов рыбам | 1984 |
|
SU1237138A1 |

iСоставитель С. Филиппова
Редактор С. Лисина Техред и,Верес Корректор А.Обручар
Заказ 4652/6 Тираж 679Подписное
ВНИИПИ Государственного комитета СССР
по деггам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Кормушка для рыб | 1980 |
|
SU944518A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ извлечения из сотов загустевшего и закристаллизовавшегося меда | 1981 |
|
SU952181A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
