(54) КОНТАКТНЫЙ БЛОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Контактная система для электрических программных механизмов | 1975 |
|
SU535610A1 |
| Сетевязальная машина | 1988 |
|
SU1618796A1 |
| Программный инверсный переключатель | 1977 |
|
SU675474A1 |
| Контактное устройство для программных механизмов | 1976 |
|
SU632002A1 |
| Сетевязальная машина | 1985 |
|
SU1406253A1 |
| Устройство для подключения радиоэлектронных блоков | 1986 |
|
SU1316101A1 |
| Устройство для подключения радиоэлектронных блоков | 1985 |
|
SU1307612A2 |
| Переключатель | 1986 |
|
SU1352550A1 |
| МЕХАНИЗМ ОТОБРАЖЕНИЯ ДЛЯ ЧАСОВОГО УСТРОЙСТВА, ПОЗВОЛЯЮЩИЙ ОТОБРАЖАТЬ ИЛИ НЕТ ТЕКУЩЕЕ ВРЕМЯ | 2009 |
|
RU2470338C2 |
| Инклинометр | 1990 |
|
SU1723317A1 |
1
Изобретение относится к электротехнике и может быть использовано для программных электрических устройств.
В известных электрических коммутационных устройствах контактный блок состоит из неподвижных и подвижных пружин, которые перемещаются элементом передачи движения, в частности, кулачком, через ползун или шток и шарнирный рычаг 1.
Известен также контактный блок, содержащий основание, на котором закреплена изоляционная плата с подвижнйми контактными пружинами, свободн е концы которых введены в пазы г±)дъемной рамки, установленной меж.ду рычагами 2.
, К недостаткам известных контактных блоков относится отсутствие регулировки давлений контактных пружин на подъемную,рамку и на блок опор, увеличение давления на привод за счет рычагов и, при использовании его в программных механизмах, недостаточная точность выполнения nporpauvмы.
Цель изобретения - повышение точности и надежности коммутирования
программных механизмов, а следовательно, и устройства в целом.
Поставленная цель достигается тем, что известный контактный блок снабжен идентичной дополнительной платой с подвижными контактными пружинами,- дополнительной подъемной рамкой с пазами и дополнительными рычагами, между которыми установлены дополнительные подвижные контактные пружины, свободные концы которых введены в пазы дополнительной подъемной рамки и каждый из них образует с известными подвижными контактными пружинами- контактную. пару, все упомянутые рычаги выполнены жесткими и шарнирно соединены . с соЪтветствующей подъемной рамкой и изоляционной платой, при этом дополнительная изоляционная плата
; также закреплена на указанном основании, в котором выполнены резьбовые отверстия под регулировочные винты.
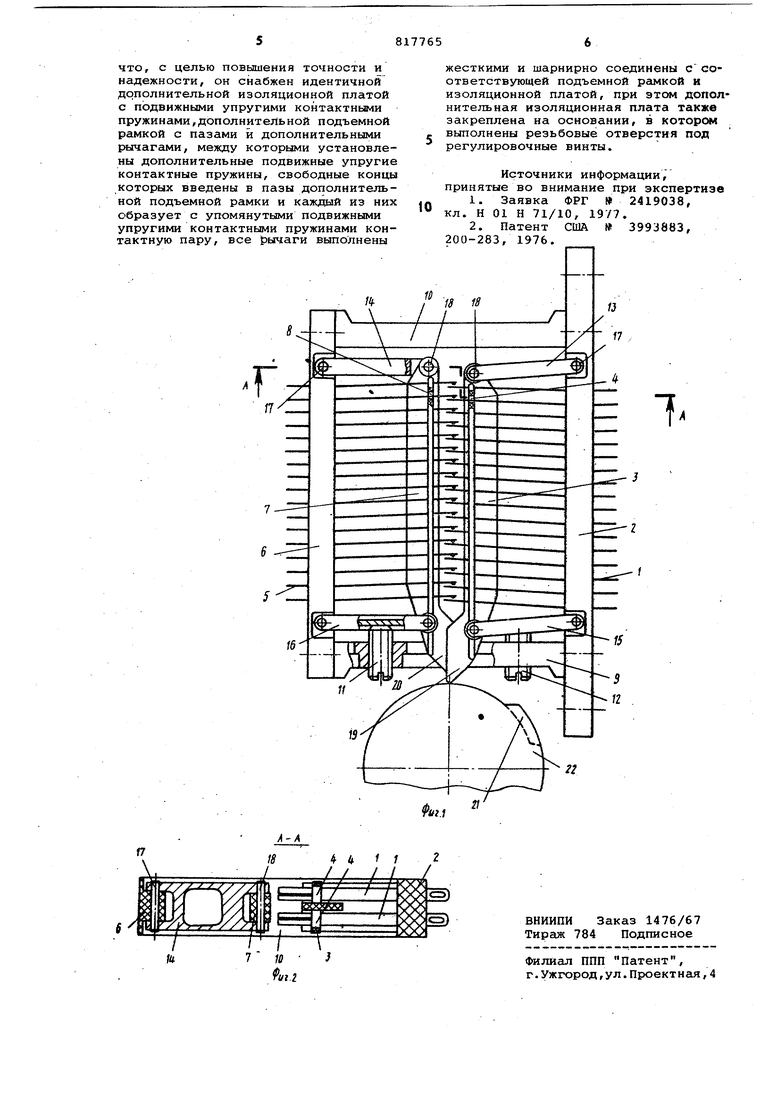
На фиг.1 изображен контактный блок; на фиг. 2 - разрез А-А на фиг.1 Контактный блок состоит из подвижных упругих контактных пружин 1, закрепленных в изоляционной плате 2
и перемещаемых с помощью подъемной
3 с пазами 4; дополнительных подвижных упругих контактных пружин 5, составляющих с подвижными контактными пружинами 1 контактную пару, закрепленных в дополнительной изоляционной плате б и перемещаемых дополнительной подъемной рамкой 7с пазами 8. Платы 2 и 6 скреплены между собой с помощью основания 9 и стойки 10, В основании 9 выполнр.ны резьбовые отверстия, в них уста :г1В- . лены регулировочные винты 11, 12 с помощью которых настраивается определенная величина давления подвижных пружин 1 и 5. Подъемные рамки 3 и 7 прикреплены к соответствующей плате 2 или б с помощью верхних 13, дополнительного 14 и нижних 15, дополнительного 16 рычагов, шарнирно закрепленных на осях 17, 18. Концы 19, 20 подъемных рамок 3, 7 имеют специальную форму для скольжения по 20 кулачку при использовании его в качестве элемента, передающего движение привода в программном механизме. Каждая подъемная рамка 3, 7 скользит по своему кулачку соответственно 21, 25 22. При использовании другого элемента, передающего движение привода, форма концов 19, 20 может быть изменена.
Контактный блок работает следую- tn щим образом.
При нахождении концов 19, 20 подъемных рамок 3 и 7 во впадине кулачков 21, 22 между подвижными контактными пружинами 1 и 5 имеется опре- деленный воздушный зазор - коммутируемые цепи разомкнуты.
Кулачки устанавливаются таким образом, что концы 19, 20 подъемных рамок 3, 7 одновременно поднимаются на гребни кулачков 21, 22, при этом 40 воздушный зазор между контактными пружинами сохраняется. При необходимости уменьшить нагрузку на привод моменты подъема концов 19 20 подъ@«1ных рамок 3, 7 можно разнести. 5 В этом случае первым на гребень кулачка 22 поднимается конец 20 подъемной рамки 7, а затем на гребень кулачка 21.поднимается конец 19 рамки 3, при этом воздушный зазор между JQ контактными пружинами 1, 5 или увеличивается, или остается прежним. Первым с гребня кулачка 22 падает 20 подъемной рамки 7, контактные пружины 1,5 замыкаются и замыкают коммутируемые ими цепи. При спа- 5 .де с гребня кулачка 21 конца 19 подъемной рамки 3 происходит размыкание контактных пружин 1, 5, и, следовательно, электрических цепей, коммутируемых ими. Подъем концов 40 подъемных рамок на гребни кулачков происходит за счет энергии привода, возврат в исходное состояние за счет упругости контактных пружин 1, 5, причем величина этого усилия 5
может быть настроена в требуемых пределах регулировочными винтами. 11, 12 и может быть минимальной, так как крепление подъемных рамок с помощью рычагов 13-16, имеющих возможность свободного поворота относительно осей 17, 18, не создает дополнительных усилий, и давление на кулачок определяется только упругостью самих контактных пружин, за счет чего снижается нагрузка на привод, а следовательно, возможно уменьшение его мощности. Снижение нагрузки на привод происходит также за счет обеспечения коммутации только при спаде. Наибольшую нагрузку н привод контактного блока производит при подъеме его на гребень кулач-: ка и, если по программе необходима коммутация одновременно нескольких контактных блоков, то в случае коммутации на подъеме они создают значительные нагрузки. При спаде нагрука на привод не увеличивается, подъем же концов подъемных рамок на гребни может производиться в любой период, лишь бы к моменту спада подъемные рамки находились на гребне.
Коммутация электрических цепей при спаде с гребней кулачков повышает также надежность работы коммутационных элементов, так как исключает моменты нестабильного переходного сопротивления контактов при коммутации на подъеме на гребень кулачка/ что значительно снижает электроэррозию контактов и повышает сро их службы. При этом повышается и точность настройки моментов коммутации, так как исключается коммутация на подъеме, а гребень кулачка, когда момент замыкания или размыкания зависит от многих факторов и колеблется в широких пределах.
Описываемый контактный блок малогабаритный, надежен в работе, прост в изготовлении и регулировке, хорошо компонуется в составе программного механизма, может применяться в широком диапазоне параметров коммутируемых электрических цепей, обеспечивает возможность настройки программы электрических программных механизмов и подобных им приборов с большой точностью, что необходимо для электрических программных меха низмов систем автоматики.
Формула изобретения
Контактный блок, содержащий основание, на котором закреплена изоляционная плата с подвижными упругими контактными пружинами, свободные концы которых введены в пазы подъемной рамки, установленной между рычагами, отличающийся тем.
