связан с эксцентриком (Э) 13. Рычаг 14, связанный с В 11 с К 2, имеет укороченное плечо относительно оси вращения его. Э 13 имеет профильную кривую с постоянным радиусом R относительно оси вращения его. В сетевязальной машине введен механизм возвратно-поступательного перемещения в горизонтальном направлении Г 1 с К 2 в зоне сброса В 11 под Ч 7 к Н 12 при помощи возвратно-поступательных перемещений в горизонтальном направлении Р 3 и 4, в пазах которых нахо- , дится Г 1 с К 2. Подвижные Р 3 и 4 ; связаны с остовом машины пружинами растяжения 24 и кинематически связаны с кулачком 25, выполненным в виде диска с впадиной для сброса В 11 под Н 12, Э 13 с кулачком 25 в процессе наладки машины отрегулированы таким образом, что профильная кривая с постоянным радиусом R P 13 совпадает по времени с впадиной кулачка 25 в процессе работы машины. 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сетевязальная машина | 1985 |
|
SU1406253A1 |
| Сетевязальная машина по типу тюлевой | 1948 |
|
SU82360A1 |
| Сетевязальная машина | 1986 |
|
SU1640241A1 |
| МАШИНА ДЛЯ ОБВЯЗКИ ИЗДЕЛИЯ БАХРОМОЙ | 1967 |
|
SU203821A1 |
| МАШИНА ДЛЯ ВЯЗКИ СЕТЕЙ | 1955 |
|
SU103022A1 |
| Машина для вязания сетей | 1934 |
|
SU44299A1 |
| Сетевязальная машина | 1974 |
|
SU521367A1 |
| Сетевязальная машина | 1981 |
|
SU1094873A1 |
| СЕТЕВЯЗАЛЬНАЯ МАШИНА | 1995 |
|
RU2099452C1 |
| Машина для сшивки сетовых полотен | 1966 |
|
SU220409A1 |

Изобретение относится к машинам для вязания рыболовных узловых сетных полотен из синтетических волокон и многофиламентных синтетических нитей и позволяет повысить производительность машины за счет повышения скорости и сокращения простоя. Сете5 8 23 12 7 и 6 21 23 4-Я М 15 вязальная маншна содержит механизм для возвратно-поступательного перемещения горизонтального гребня (Г) 1 с крючками (К) 2 в пазах подвижных в горизонтальном направлении рамках (Р) 3 и 4 - основной 3 и вспомогательной 4, которые соединены между собой жестко, над подвижной кареткой 5, несущей шпули 6, размещенные в челноках -(Ч) 7 от зоны узлообраэова- ния, находящейся под вертикальным гребнем 8 со своими К 9 и распредзлн- тельной гребенкой 10, до зоны сброса основных, веревок (В) 1 1 под Ч 7 при помощи нитеснимателя (Ч) 12. Пазы Р 3 и 4 имеют упрощенный профиль кривых с перепадом вниз относительно первоначального положения пазов, рас- полсженных горизонтально у зоны уздо- образования с большими радиусами закругления. Г 1 с К 2 кинематически. CJP 13 ot оо vj со оэ 25
Изобретение относится к машинам для вязания рыболовных узловых сетных полотен из синтетических волокон и . монофиламентных синтетических нитей (мононитей) и может быть использовано в сетевязальных производствах се- теснастной отрасли рыбного хозяйства.
Целью изобретения является повыше- ние производительности за счет повышения скорости и сокращения простоя машины.
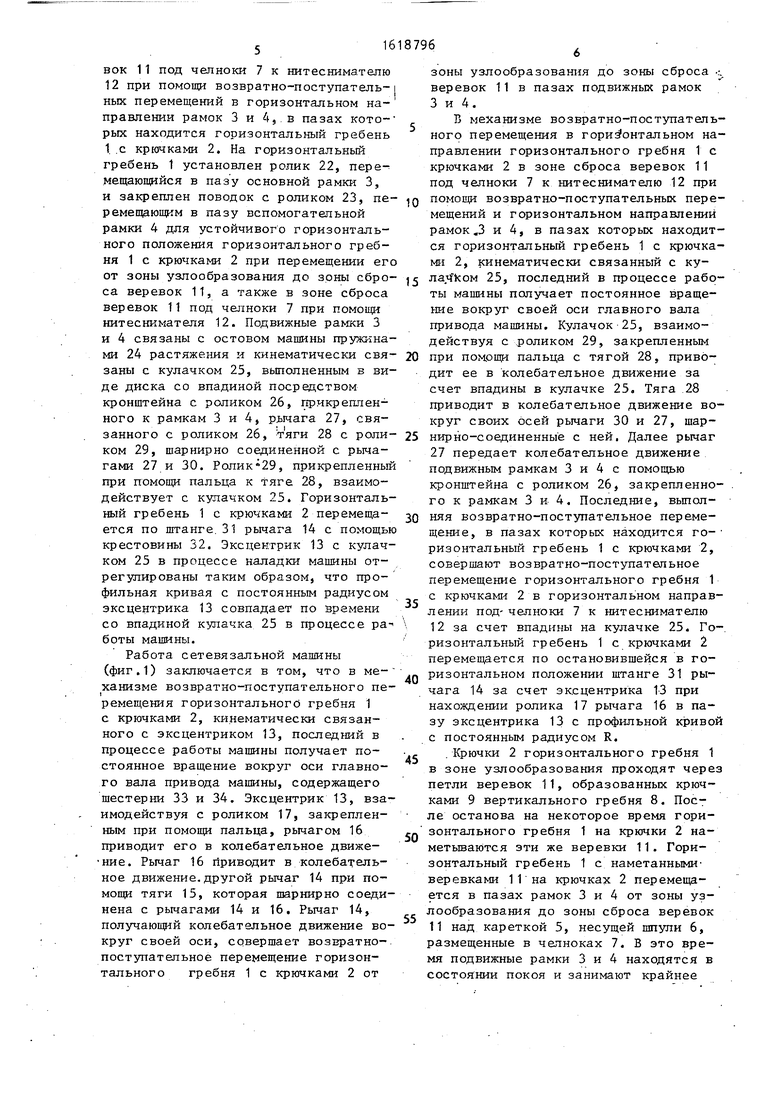
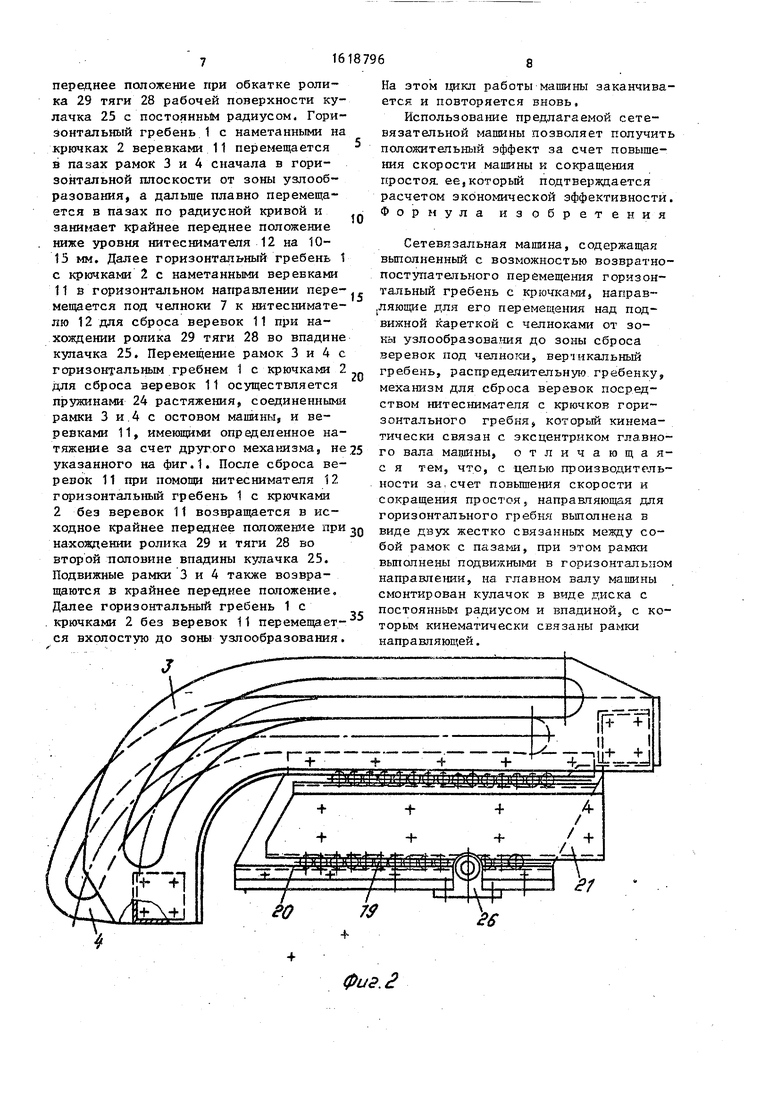
На фиг.1 показана сетевая машина; на фиг.2 - подвижные в горизонтальном направлении рамки с пазами; на фиг.З- рычаг с укороченным плечом; на фиг.4- эксцентрик; на фиг.5 - механизм возвратно-поступательного перемещения в горизонтальном направлении горизон- тального гребня - с крючками в зоне сброса веревок.
Сетевязательная машина (фиг.1) для выработки узловых сетных полотен содержит механизм возвратно-поступа тельного перемещения горизонтального гребня 1 с крючками 2 в пазах подвижных в горизонтальном направлении основной 3 и вспомогательной 4 рамок, которые соединены между собой жестко над подвижной кареткой 5, несущей . шпули 6,размещенные в челноках 7, от зоны узлообразования, находящейся под вертикальным гребнем 8 со своими крючками 9 и распределительной гре- бенкой 10, до зоны сброса веревок 11 под челноки 7 при помощи нитеснимате- ля 12. Пазы рамок 3 и 4 имеют упрощенный профиль кривых с перепадом вниз относительно первоначального по
ложения пазов, расположенных горизонтально у зоны узлообразования.
Рамки 3 и 4 имеют пазы с упрощенным профилем кривых с большими радиу0
5
Q :
0
сами закругления, обеспечивающими плавность хода возвратно-поступательного перемещения горизонтального гребня 1 с крючками 2. В механизме
1 оризоктальный гребень 1 с тсрючками
2 кинематически связан с эксцентриком 13 посредством рычага 14 с укороченными плечом относительно оси вращения его, тяги 15, регулируемой по длине в процессе наладки машины, которая шарнирно соединена с рычагами 14 и: 16. Ролик 17, закрепленный при помощи пальца на рычаге 16, взаимодействует с эксцентриком 13, имеющим профильную кривую с постоянным радиусом. R относительно оси вращения эксцентрика 13. Причем один шарнир тяги 15, связанный с рычагом 14, имеет регулировочный паз с винтом 18 в рычаге 14 (фиг.З), применяемый в процессе наладки машины для изменения плеча рычага 14 с целью изменения длины хода горизонтального гребня 1 с крючками 2 от зоны узлообразования до зоны сброса веревок. Подвижные рамки 3 и 4 (фиг, 1 и 2) перемещаются в горизонтальном направлении на роликах 19, заложенных в сепараторах 20, расположенных в продольных пазах направляющей 21, которая прикреплена к раме остова машины.
Продольные пазы для роликов 19 также имеют и подвижные рамки 3 и 4. Для устойчивости перемещения рамок 3 и 4 ролики 19 с сепараторами 20 расположены в верхней и нижней частях направляющей 2t.
В сетевязальной машине (фиг.1 и 5) расположен механизм возвратно-поступательного перемещения в горизонтальном направлении горизонтального гребня 1 с крючками 2 в зоне сброса веревок 11 под челноки 7 к нитеснимателю 12 при помощи возвратно-поступательных перемещений в горизонтальном направлении рамок 3 и 4, в пазах кото- рых находится горизонтальный гребень 1. .с крючками 2. На горизонтальный гребень 1 установлен ролик 22, пере- мешающийся в пазу основной рамки 3, и закреплен поводок с роликом 23, перемещающим в пазу вспомогательной рамки 4 для устойчивого горизонтального положения горизонтального гребня 1 с крючками 2 при перемещении его
от зоны узлообразования до зоны сбро- 25, последний в процессе рабоа также в зоне сброса челноки 7 при помощи
са веревок 11, веревок 11 под
нитеснимателя 12. Подвижные рамки 3 и 4 связаны с остовом машины пружинами 24 растяжения и кинематически свя- 20 заны с кулачком 25, выполненным в виде диска со впадиной посредством кронштейна с роликом 26, прикрепленного к рамкам 3 и 4, рычага 27, связанного с роликом 26, тяги 28 с роли- 25 ком 29, шарнирно соединенной с рычагами 27 и 30. Ролик«29, прикрепленный при помощи пальца к тяге 28, взаимодействует с кулачком 25. Горизонтальты машины получает постоянное вращение вокруг своей оси главного вала привода машины. Кулачок-25, взаимодействуя с роликом 29, закрепленным при помощи пальца с тягой 28, приводит ее в колебательное движение за счет впадины в кулачке 25. Тяга 28 приводит в колебательное движение вокруг своих осей рычаги 30 и 27, шар- нирно-соединенные с ней. Далее рычаг 27 передает колебательное движение подвижным рамкам 3 и 4 с помощью кронштейна с роликом 26, закрепленного к рамкам 3 и 4. Последние, выполняя возвратно-поступательное перемещение, в пазах которых находится го- ризонтальный гребень 1 с крючками 2, совершают возвратно-поступательное перемещение горизонтального гребня 1 с крючками 2 в горизонтальном направлении под- челноки 7 к нитеснимателю 12 за счет впадины на кулачке 25. Го-, ризонтальный гребень 1 с крючками 2 перемещается по остановившейся в горизонтальном положении штанге 31 рычага 14 за счет эксцентрика 13 при нахождении ролика 17 рычага 16 в пазу эксцентрика 13 с профильной кривой с постоянным радиусом R.
ный гребень 1 с крючками 2 перемещается по штанге. 31 рычага 14 с помощью крестовины 32. Эксцентрик 13 с кулачком 25 в процессе наладки машины отрегулированы таким образом, что профильная кривая с постоянным радиусом эксцентрика 13 совпадает по времени со впадиной кулачка 25 в процессе ра- боты машины.
Работа сетевязальной машины (фиг . 1) заключается в том, что в ме- ханизме возвратно-поступательного перемещения горизонтального гребня 1 с крючками 2, кинематически связанного с эксцентриком 13, последний в процессе работы машины получает постоянное вращение вокруг оси главного вала привода машины, содержащего шестерни 33 и 34. Эксцентрик 13, взаимодействуя с роликом 17, закрепленным при помощи пальца, рычагом 16 приводит его в колебательное движе- ние. Рычаг 16 приводит в колебательное движение.другой рычаг 14 при помощи тяги 15, которая шарнирно соединена с рычагами 14 и 16. Рычаг 14, получающий колебательное движение вокруг своей оси, совершает возвратно-, поступательное перемещение горизонтального гребня 1 с крючками 2 от
зоны узлообразования до зоны сброса :. веревок 11 в пазах подвижных рамок 3 и 4.
В механизме возвратно-поступательного перемещения в горизонтальном направлении горизонтального гребня I с крючками 2 в зоне сброса веревок 11 под челноки 7 к нитеснимателю 12 при помощи возвратно-поступательных перемещений и горизонтальном направлении рамок«3 и 4, в пазах которых находится горизонтальный гребень 1 с крючками 2, кинематически связанный с ку05
0
5
0
5
0
5
ты машины получает постоянное вращение вокруг своей оси главного вала привода машины. Кулачок-25, взаимодействуя с роликом 29, закрепленным при помощи пальца с тягой 28, приводит ее в колебательное движение за счет впадины в кулачке 25. Тяга 28 приводит в колебательное движение вокруг своих осей рычаги 30 и 27, шар- нирно-соединенные с ней. Далее рычаг 27 передает колебательное движение подвижным рамкам 3 и 4 с помощью кронштейна с роликом 26, закрепленного к рамкам 3 и 4. Последние, выполняя возвратно-поступательное перемещение, в пазах которых находится го- ризонтальный гребень 1 с крючками 2, совершают возвратно-поступательное перемещение горизонтального гребня 1 с крючками 2 в горизонтальном направлении под- челноки 7 к нитеснимателю 12 за счет впадины на кулачке 25. Го-, ризонтальный гребень 1 с крючками 2 перемещается по остановившейся в горизонтальном положении штанге 31 рычага 14 за счет эксцентрика 13 при нахождении ролика 17 рычага 16 в пазу эксцентрика 13 с профильной кривой с постоянным радиусом R.
.Крючки 2 горизонтального гребня 1 в зоне узлообразования проходят через петли веревок 11, образованных крючками 9 вертикального гребня 8. После останова на некоторое время горизонтального гребня 1 на крючки 2 наметываются эти же веревки 11. Горизонтальный гребень 1 с наметанными- веревками 1 Г на крючках 2 перемещается в пазах рамок 3 и 4 от зоны узлообразования до зоны сброса веревок 11 над кареткой 5, несущей шпули 6, размещенные в челноках 7. В это время подвижные рамки 3 и 4 находятся в состоянии покоя и занимают крайнее
переднее положение при обкатке ролика 29 тяги 28 рабочей поверхности кулачка 25 с постоянна радиусом. Горизонтальный гребень 1 с наметанными на крючках 2 веревками 11 перемещается в пазах рамок 3 и 4 сначала в горизонтальной плоскости от зоны узлооб- разования, а дальше плавно перемещается в пазах по радиусной кривой и занимает крайнее переднее положение ниже уровня нитеснимателя 12 на 10- 15 мм. Далее горизонтальный гребень 1 с крючками 2 с наметанными веревками 11 в горизонтальном направлении перемещается под челноки 7 к нитеснимате- лю 12 для сброса веревок 11 при нахождении ролика 29 тяги 28 во впадине кулачка 25. Перемещение рамок 3 и 4 с горизонтальным гребнем 1 с крючками 2 для сброса веревок 11 осуществляется пружинами 24 растяжения, соединенными рамки 3 и.4 с остовом мамины, и веревками 11, имеющими определенное натяжение за счет другого механизма, не указанного на фиг.1. После сброса веревок 11 при помощи нитеснимателя 12 горизонтальный гребень 1 с крючками 2 без веревок 11 возвращается в исходное крайнее переднее положение при нахождении ролика 29 и тяги 28 во второй половине впадины кулачка 25. Подвижные рамки 3 и 4 также возвращаются в крайнее переднее положение. Далее горизонтальный гребень 1 с . крючками 2 без веревок 11 перемещается вхолостую до зоны узлообразования.
фи г. 2
0
5 Q
На этом цикл работы машины заканчивается, и повторяется вновь,
Использование предлагаемой сете- вязательной машины позволяет получить положительный эффект за счет повышения скорости машины к сокращения простоя, ее,который подтверждается расчетом экономической эффективности. Формула изобретения
Сетевязальная машина, содержащая выполненный с возможностью возвратно- поступательного перемещения горизонтальный гребень с крючками, направ- яющие для его перемещения над подвижной кареткой с челноками от зо- Кг.1 узлообразования до зоны сброса веревок под челноки, вертикальный гребень, распределительную гребенку, механизм для сброса веревок посредством нитеснимателя с крючков горизонтального гребня, который кинематически связан с эксцентриком главного вала машины, отличающая- с я тем, что, с целью производительности за,счет повышения скорости и сокращения простоя, направляющая для горизонтального гребня выполнена в виде двух жестко связанных между собой рамок с пазами, при этом рамки выполнены подвижными в горизонтальном направлении, на главном валу машины смонтирован кулачок в виде диска с постоянным радиусом и впадиной, с которым кинематически связаны рамки направляющей.
S1
32
Я
&
фие.Ь
25
0be.S
| Сетевязальная машина | 1974 |
|
SU521367A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
