(54) ДАТЧИК ПОЛОЖЕНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛЯРИЗОВАННЫЙ ГЕРКОН И ПОЛЯРИЗОВАННОЕ КОММУТАЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2474000C1 |
| Выключатель | 1982 |
|
SU1050001A1 |
| КЛАПАН ЭЛЕКТРОМАГНИТНЫЙ НОРМАЛЬНО ЗАКРЫТЫЙ | 2020 |
|
RU2752959C1 |
| Путевой выключатель | 1984 |
|
SU1159081A1 |
| ГЕРКОНОВЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 1993 |
|
RU2032955C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕГУЛЯТОР ДЛЯ БАЛАНСОВЫХ ЧАСОВ | 1971 |
|
SU300872A1 |
| Путевой выключатель Рохина | 1989 |
|
SU1753504A1 |
| ВЫКЛЮЧАТЕЛЬ КОНЦЕВОЙ БЕСКОНТАКТНЫЙ | 2002 |
|
RU2239252C2 |
| Устройство для контроля положения линейки стрелочного привода | 1988 |
|
SU1594041A1 |
| Устройство для считывания магнитной цифровой информации | 1980 |
|
SU875455A1 |
Изобретение относится к электротехнике, в частности к датчикам положения с подвижным постоянным магнитом. Известны датчики положения, содержащие балансовый осциллятор с ферромагнитной шторкой на ободе баланса и последовательную магнитную цепь из жестко закрепленного геркона, неподвижного постоянного магнита и ферромагнитного маг нитопровода с зазором. При своем перемещении щторка проходит через зазор между полюсами магнитопровода, вызывая срабатывание геркона. Известно, что надежность работы геркона характеризуется коэффициентом возврата, т. е. отношением потока отпускания к потоку срабатывания. Величина коэффициента возврата герконов, как правило, не нормируется и составляет 0,3-0,9. Следовательно, величина магнитного потока в зазоре геркона должна меняться, как минимум, в 3-4 раза, а с учетом коэффициента запаса по потоку срабатывания - в 6- 8 раз 1. Обеспечить указанное соотношение между максимальным и минимальным потоками в датчике указанной конструкции очень сложно. Наиболее близким техническим решением к предлагаемому является датчик положения, содержащий балансовый осциллятор с постоянным магнитом с осевой намагниченностью на ободе и неподвижно закрепленный геркон. Магнит, совершающий вместе с балансом колебательные движения, периодически приближается к геркону, создавая в его зазоре магнитный поток одного направления. Надежность работы такого датчика положения, как и первого, зависит от соотношения между максимальным и минимальны.м потоками в зазоре геркона. Регулировать величину магнитного потока в рассматриваемом датчике можно за счет регулирования габаритов магнита и (или) его рабочего хода 2. Однако увеличение рабочего хода магнита неизбежно приводит к увеличению габаритов датчИ|Ка в целом, а изменение параметров магнита при ограниченных размерах датчика, как правило, смысла не имеет, так как при малой величине хода
и сильном магните (даже при применении геркона с высоким коэффициентом возврата) снижается надежность при отпускании геркона, а при применении слабого магнита недостаточна надежность при срабатывании геркона.
Поэтому, учитывая малые размеры датчика указанной конструкции, для обеспечения надежной работы, необходимо каждый раз проводить подбор герконов и постоянных магнитов и тщательную регулировку положения геркона относительно магнита.
Цель изобретения -- повышение надежности работы датчика положения при одновременном уменьшении трудозатрат при изготовлении.
Поставленная цель достигается тем, что в датчике положения, содержащем балансовый осциллятор с постоянным магнитом с осевой намагниченностью и неподвижно закрепленный геркон, постоянный магнит с осевой намагниченностью установлен на оси балансового осциллятора и снабжен на одном из торцов магнитопроводом, который ориентирован относительно геркона так, что он перекрывает рабочий зазор геркона при нахождении балансового осциллятора в одном из амплитудных положений.
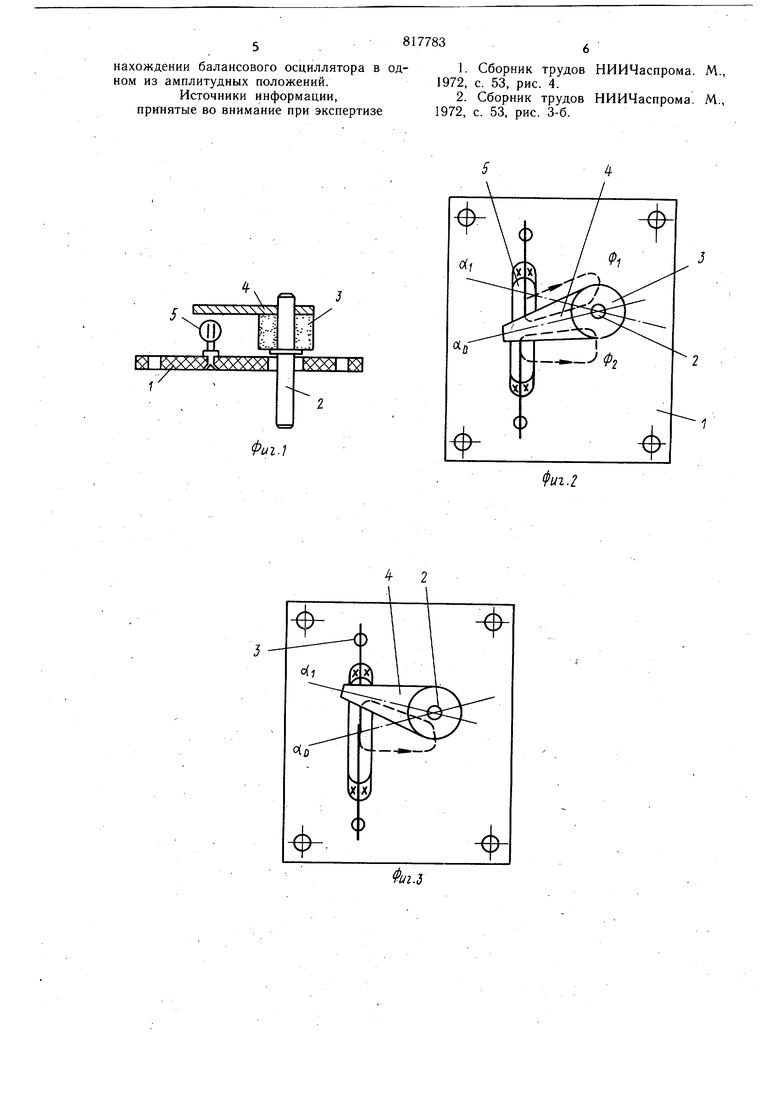
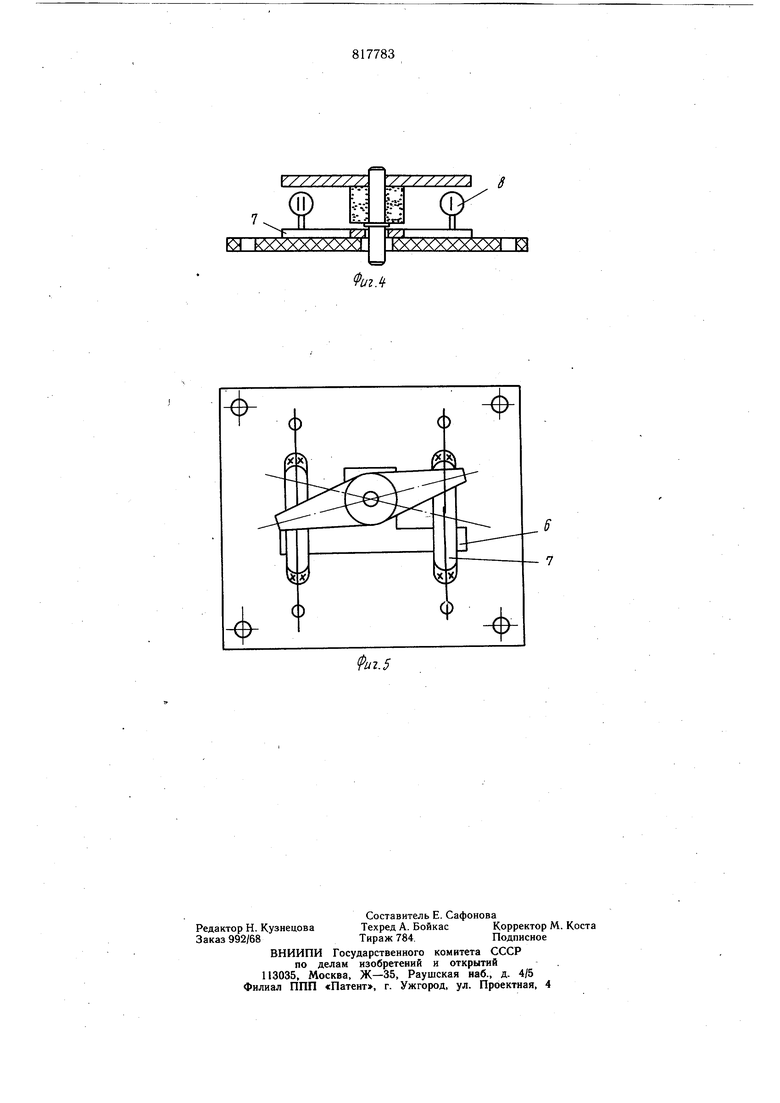
На фиг. 1 представлен схематично датчик положения, общий вид; на фиг. 2 и 3 - датчик, вид сверху, согласно фиг. 1 при двух амплитудных положениях балансового осциллятора; на фиг. 4 - форма.исполнения датчика с двумя герконами; на фиг. 5 - вид сверху датчика согласно фиг. 4.
В плате 1 (фиг. 1) выполнено сквозное отверстие, через которое проходит ось 2 балансового осциллятора (не показано). На ось 2 жестко посажен постоянный магнит 3, ось намагничивания которого совпадает с осью 2 балансового осциллятора, и магнитопровод 4, закрепленный на торце магнита 3. Магнитопровод 4 выпвлнен из магнитомягкого материала.
На плате 1 жестко закреплен геркон 5. Магнитопровод 4 ориентирован относительно геркона 5 таким образом, что при нахождений балансового осциллятора в одном из крайних амплитудных положений, он перекрывает рабочий зазор геркона 5.
В форме исполнения согласно фиг. 4 на плате 1 закреплен допдлнительный магнитопровод 6, повышающий чубствительность датчика, на котором в свою очередь закреплены два геркона 5 и 7. На ось 2 балансового осциллятора жестко посажены постоянный магнит 3 и прикрепленный к его торцу симметричный магнитопровод 4, перекрывающий поочередно в амплитудных положениях балансового осциллятора рабочие зазоры герконов 5 и 7.
. Датчик согласно фиг. 1-3 работает следующим образом.
При нахождении балансового осциллятора в положении, когда конец магнитопровода 4 перекрывает область рабочего зазора геркона (фиг. 2), магнитный поток, создаваемый постоянным магнитом 3, проходит по магнйтопроводу 4 и разветвляется на две составляющие Ф i и Ф j. разного направления, которые замыкаются на контактные пластины геркона 5. При этом разность магнитных потенциалов между пластинами геркона 5 практически равна нулю, и поток в зазоре геркона 5 отсутствует. Геркон 5 замкнут.
При приходе балансового осциллятора в другое крайнее положение (фиг. 3) магнитный поток одного направления замыкается следующим образом; магнитопровод 4, первая контактная пластина геркона 5, его рабочий зазор, вторая пластина. Геркон 5 .срабатывает, датчик выдает электрический сигнал. Затем цикл повторяется.
Датчик согласно фиг. 4 работает аналогично вышепредлагаемому, но с удвоенной частотой (фиг. 5).
В этом случае датчик выполняет функцию переключателя.
Таким образом, в предлагаемой конструкции датчика величина магнитного потока в рабочем зазоре геркона при одном из амплитудных положе«ий балансового осциллятора практически равна нулю, что гарантирует надежное размыкание геркона и позволяет применять для управления гер0 коном постоянный магнит с заведомо большой намагничивающей силой, обеспечивающей в другом крайнем положении системы надежное срабатывание геркона, причем надежная работа датчика обеспечивается при его малых габаритах и при использовании герконов с любым коэффициентом возврата, т. е. без затрат времени на подбор герконов.
Кроме того, размещение постоянного магнита непосредственно на оси балансового осциллятора сводит к минимуму его влияния на момент инерции балансового осциллятора и, следовательно, на ее динамические характеристики.
Формула изобретения
Датчик положения, со}1ержащий балансовый осциллятор с постоянным магнитом
с осевой намагниченностью и неподвижно закрепленный геркон, отличающийся тем, что, с целью повышения надёжности при одновременном уменьщении трудозатрат при изготовлении, постоянный магнит с осевой намагниченностью установлен на оси
балансового осциллятора и снабжен на одном из торцов магнитопроводом, который ориентирован относительно геркона так, что он перекрывает рабочий зазор геркона при
5817783
нахождении балансового осциллятора в од-1. Сборник трудов НИИЧаспрома. М
ном из амплитудных положений.1972, с. 53, рис. 4.
Источники информации.
принятые во внимание при экспертизе
Л V.. lyc/y L/riV,- П.
Фиг Л
