(54) УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ПОДСТРОЙКИ
ЧАСТОТЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство фазовой автоподстройки частоты | 1990 |
|
SU1775855A1 |
| Устройство радиоимпульсной автоматической подстройки частоты | 1981 |
|
SU1146799A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ПОДСТРОЙКИ ДЕВИАЦИИ ЧАСТОТЫ | 1997 |
|
RU2126587C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ПОЛОСЫ ЗАХВАТА СИСТЕМЫ ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ С ЗНАКОВЫМ ЛОГИЧЕСКИМ ФАЗОВЫМ ДИСКРИМИНАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2582878C1 |
| Следящий фильтр-демодулятор | 1980 |
|
SU1020970A1 |
| Формирователь линейно-частотно-модулированных сигналов | 1986 |
|
SU1424112A1 |
| Цифровой фазометр | 1976 |
|
SU681388A1 |
| ЙДТЕЙТИС- <л*^ теХНЕЧЕСКдй ^^ЕИБЛЙОТЕКАВ. М, Сафонов | 1970 |
|
SU283316A1 |
| Устройство автоподстройки частоты генератора с частотной модуляцией | 1987 |
|
SU1566458A1 |
| Реле частоты | 1978 |
|
SU817785A1 |
1
Изобретение относится к радиотехнике и может использоваться для поддержания синфазности различных источников периодических и квазипериодических сигналов.
Известно устройство автоматической подстройки частоты, содержащее последовательно соединенные генератор опорного сигнала, фазовый детектор, сумматора, петлевой фильтр и генератор, управляемый напряжением, выход которого подключен к дру гому входу фазового детектора и частотному детектору, к выходу частотного детектора подключена дифференцирующая цепь 1 .
Однако известное устройство имеет недостаточное быстродействие.
Цель изобретения - повышение быстродействия.
Поставленная цель достигается тем, что в устройстве автоматической подстройки частоты, содержащем, последовательно соединенные генератор опорного сигнала, фазовый детектор, сумматор, петлевой фильтр и генератор, управляемый напряжением, выход которого подключен к другому входу фазового детектора и частотному детектору.
К выходу частотного детектора подключена дифференцирующая цепь, между выходом частотного детектора и другим входом сум матора включены последовательно нелинейный элемент, типа «квадратный корень, элемент сравнения, другой вход которого подключен к выходу дифференцирующей цепи, и релейный элемент, при этом другой вход частотного детектора подключен к выходу генератора опорного сигнала.
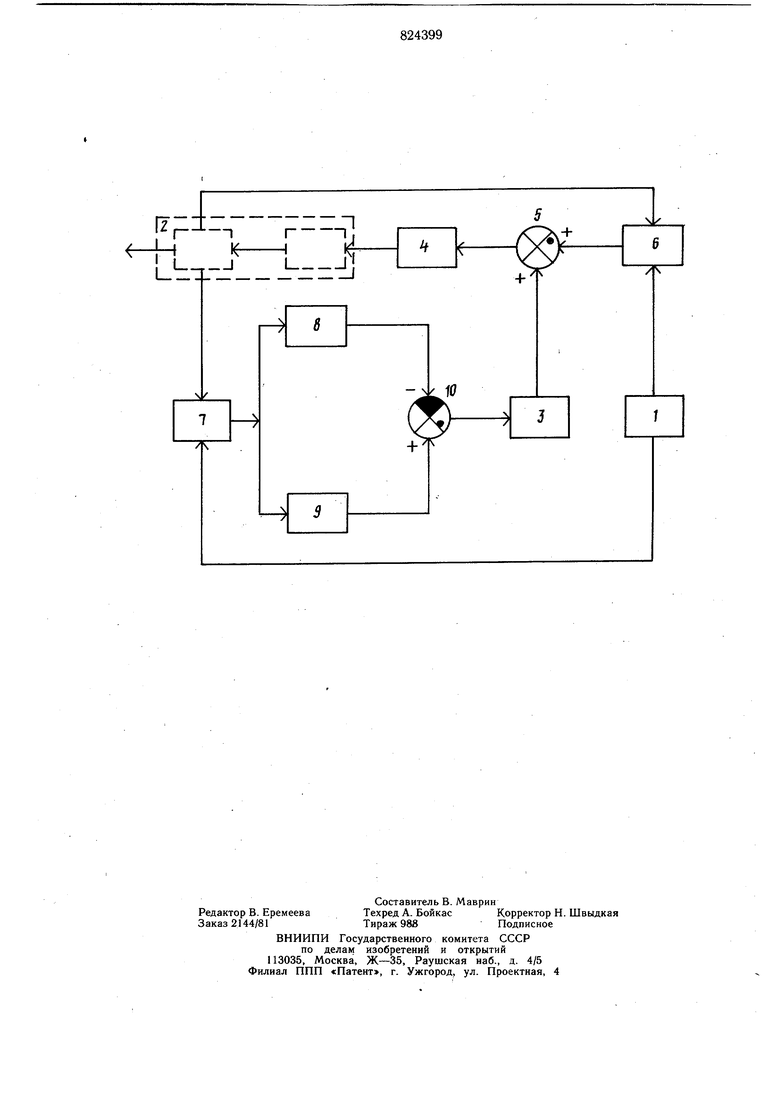
На чертеже приведена структурная электрическая схема предлагаемого устройства.
Устройство автоматической подстройки частоты содержит генератор 1 опорного сигнала, генератор 2, управляемый напряжением, релейный элемент 3, петлевой фильтр 4, сумматор .5, фазовый детектор б, частотный детектор 7, дифференцирующую цепь 8, нелинейный элемент 9 «квадратный корень, элемент 10 сравнения.
Устройство работает следующим образом.
Регулирующий сигнал в стационарном
0 режиме в устройстве формируется фазовым детектором 6, который через сумматор 5 петлевой фильтр 4 воздействует на генератор 2.
В этом случае частоты синхронизируемых колебаний становятся почти оди-наковыми, в системе устанавливается постоянная фаза и выходное напряжение фазового детектсГра 6 постоянно. Это автоматический регулятор нижнего уровня регулирования (обычное кольцо фазовой автоподстройки частоты) .
В случае же н аличия фазового рассогласования между генераторами 1 и 2 (динамический режим) регулирующий сигнал по кольцу фазовой автоподстройки воздействует на управляющий вход генератора 2, внося соответствующую расстройку в него. Регулирующий сигнал зависит только от величины знака фазовой ощибки. В предлагае.мом устройстве в дополнении к этому прибавляется сигнал, выработанный на основании анализа величин и знаков мгновенных фазовой и частотной ошибок системы, увеличивая мощность регулирующего сигнала и формируя его таким образом, чтобы обеспечивались разнотемповые режимы протека1;мя переходных процессов. При этом расстройка, вносимая в генератор 2 управляемый напряжением, будет изменяться Тю экстремальному закону, представляющему собой сочетание максимальной и минимальной регулируемых расстроек, что сводит разность фаз (частот) генераторов 1 и 2 к минимальной погрешности за наи-кратчайще( время. Это автоматический регулятор верхнего уровня регулирования. Для реализации этого, регулирующий сигнал образуется на выходе сумматора 5 и представляет собой сумму сигналов с выходов фазового детектора 6 и релейного элемента 3. Сигнал с выхода элемента 10 сравнения, образованный как разность между сигналами, получаемыми с выходов дифференцирующей цепи 8 и нелинейного элемента 9, подается на вход релейного элемента 3 и управляет сигналом на его выходе. Следовательно, сигнал на входе сумматора 5 формируется на основании сигнала, нелинейно зависящего от мгновенной разности фаз, и на основании сигнала, пропорционального мгновенной разности частот. В стационарном режиме, когда фазы (частоты) генераторов 1 и 2 выравниваются, т. е. разности становятся близкими к заданной величине (нулю), усредненное напряжение на выходе релейного элемента 3 отсутствует и предлагаемая система синхронизации работает как обычное кольцо фазовой автоподстройки. Непосредственно на объект регулирования воздействует регулятрр нижнего уровня, адаптацию параметров которого осуществляет регулятор верхнего уровня. Координатор (сумматор) согласует частные цели регуляторов нижнего и верхнего уровней.
Автоматический регулятор верхнего уровня расщиряет логические возможности систем синхронизации без ухудшения их помехоустойчивости, так как он не входит в обычное кольцо фазовой автоподстройки и играет роль логической гибкой нелинейной обратной связи. При этом полоса захвата системы в основном определяется параметрами регулирующего сигнала на выходе сумматора 5 и без нарушения фильтрующих свойств становится управляемой (широкой, а затем узкой), тем самым обеспечивается
высокая точность и быстродействие устройства поддержания синфазности двух колебаний.
Формула изобретенияУстройство автоматической подстройки частоты, содержащее последовательно соединенные генератор опорного сигнала, фазовый детектор, сумматор, петлевой фильтр
и генератор, управляемый напряжением, выход которого подключен к другому входу фазового детектора и частотному детектору к выходу частотного детектора подключена дифференцирующая цепь, отличающееся тем, что, с целью повышения быстродействия между выходом частотного детектора и другим входом сумматора включены последовательно нелинейный элемент типа «квадратный корень, элемент сравнения, другой вход которого подключен к выхоДу дифференцирующей цепи, и релейный элемент,, при этом другой вход частотного детектора подключен к выходу генератора опорного сигнала.
Источники информации, принятые во внимание при экспертизе
