Изобретение относится к области радиотехники и может быть использовано при разработке схем гетеродинов, управляемых напряжением генераторов синусоидальных колебаний и средств связи с частотной модуляцией передаваемого сигнала.
Известные устройства фазовой автоматической подстройки частоты (ФАПЧ) содержат генератор стабильной частоты, делитель частоты, фазовый детектор, формирователь импульсов, фильтр низкой частоты и управляемый генератор [1].
Такие устройства обеспечивают высокую точность подстройки частоты за интервал времени, значительно превышающий длительность периода входной частоты, так как в схеме ФАПЧ используют делитель частоты в Nдч раз и низкочастотный фильтр для сглаживания пульсации управляющего напряжения, формируемого из выходных импульсов фазового детектора разностной частоты. Кроме того, в процессе автоподстройки при приближении частоты в цепи обратной связи к частоте входного сигнала уменьшается сигнал рассогласования, что в свою очередь приводит к возрастанию времени вхождения устройства в синхронизм. Вследствие изложенных причин известные устройства используют, главным образом, для стабилизации средней частоты гетеродинов (несущей частоты радиопередатчиков), а также для подстройки девиации частоты при входных сигналах известной формы, в частности, при калибровке аппаратуры связи.
Известны также устройства автоматического контроля девиации частоты на основе генератора стабильной частоты, усилителя, детектора, управляемого генератора и низкочастотного фильтра [2].
В этих устройствах реализовано частотное детектирование входного сигнала, вследствие чего они могут быть использованы только для контроля и регулировки максимальных значений девиации частоты и не позволяют выполнять подстройку параметров схемы во всем динамическом диапазоне изменения девиации частоты.
Наиболее близким по технической сущности (прототипом) является устройство автоматической подстройки частоты, содержащее объект подстройки (например, высокочастотный генератор частотно-модулированных колебаний) и аналоговую цепь стабилизации на основе последовательно соединенных блока вычитания частот, преобразователя частоты в напряжение, фильтра низкой частоты и усилителя переменного тока [3].
Точность контроля и подстройки частоты в известном устройстве ограничена двумя факторами: нестабильностью параметров аналоговых функциональных узлов, применяемых в цепи стабилизации частоты, и влиянием нелинейности характеристики преобразования цепи автоподстройки на девиацию выходной частоты. Вследствие этого известное устройство не обеспечивает стабилизацию девиации частоты в широком динамическом диапазоне входного сигнала и практически работоспособно только при постоянной амплитуде и прямоугольной форме входного сигнала.
Перечисленные недостатки известных схем, в том числе прототипа, не позволяют реализовать непрерывную во времени подстройку девиации частоты в рабочем режиме, так как характеризуются существенными отличиями условий подстройки (формой и частотой сигналов) от реальных режимов эксплуатации. Кроме того, в известных устройствах не обеспечивается компенсация нелинейности модуляционной характеристики объекта подстройки вследствие большой инерционности применяемых аналоговых схем автоподстройки частоты.
Технической задачей изобретения является повышение точности подстройки девиации частоты в реальных режимах эксплуатации и уменьшение нелинейности модуляционной характеристики объекта подстройки в широком динамическом диапазоне работы.
Для решения этой технической задачи в устройство, содержащее объект подстройки и последовательно соединенные блок вычитания частот, преобразователь частоты в напряжение, фильтр низкой частоты и усилитель переменного тока, дополнительно введены источник опорного напряжения, управляемый генератор, аналоговое вычитающее устройство, формирователь импульсов, сумматор и последовательно соединенные кварцевый генератор импульсов и делитель частоты, причем блок вычитания частот реализован в цифровом виде. Вход устройства подключен к управляющему входу управляемого генератора и первому входу аналогового вычитающего устройства, второй вход которого соединен с выходом усилителя переменного тока, а выход аналогового вычитающего устройства подключен к входу объекта подстройки. Выход объекта подстройки, являющийся выходом устройства, через формирователь импульсов соединен с одним входом блока вычитания частот, второй вход которого подключен к выходу сумматора. При этом первый вход сумматора соединен с выходом управляемого генератора, а его второй вход подключен к выходу делителя частоты и объединенным входам синхронизации преобразователя частоты в напряжение и управляемого генератора, аналоговые входы которых также объединены и подключены в выходу источника опорного напряжения. Кроме того, сумматор выполнен на трехвходовом мажоритарном элементе, ждущем мультивибраторе и двух триггерах. Первый вход сумматора соединен со стробирующим входом первого триггера, D-вход которого подключен к нулевой цепи, а его вход установки нуля соединен с прямым выходом второго триггера и первым входом мажоритарного элемента, второй вход которого, являющийся вторым входом сумматора, соединен с входом установки второго триггера и входом ждущего мультивибратора. Выход ждущего мультивибратора подключен к третьему входу мажоритарного элемента и стробирующему входу второго триггера, D-вход которого соединен с инверсным выходом первого триггера. Выход мажоритарного элемента является выходом сумматора.
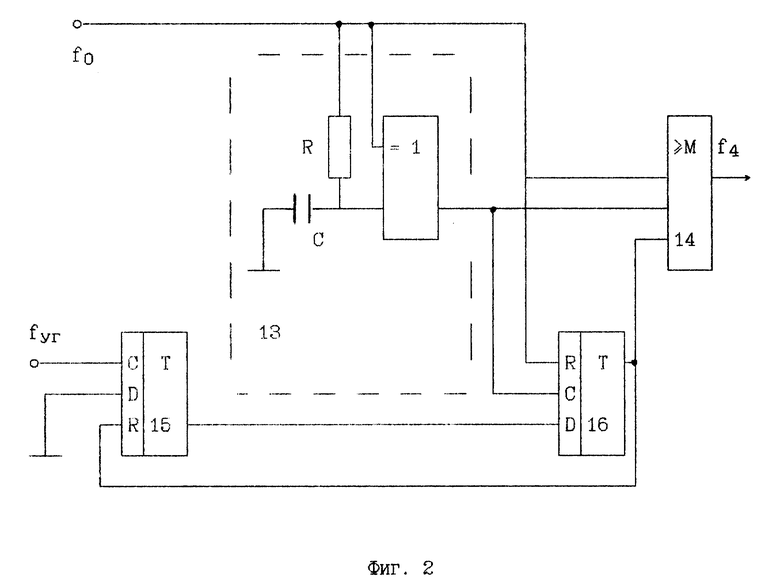
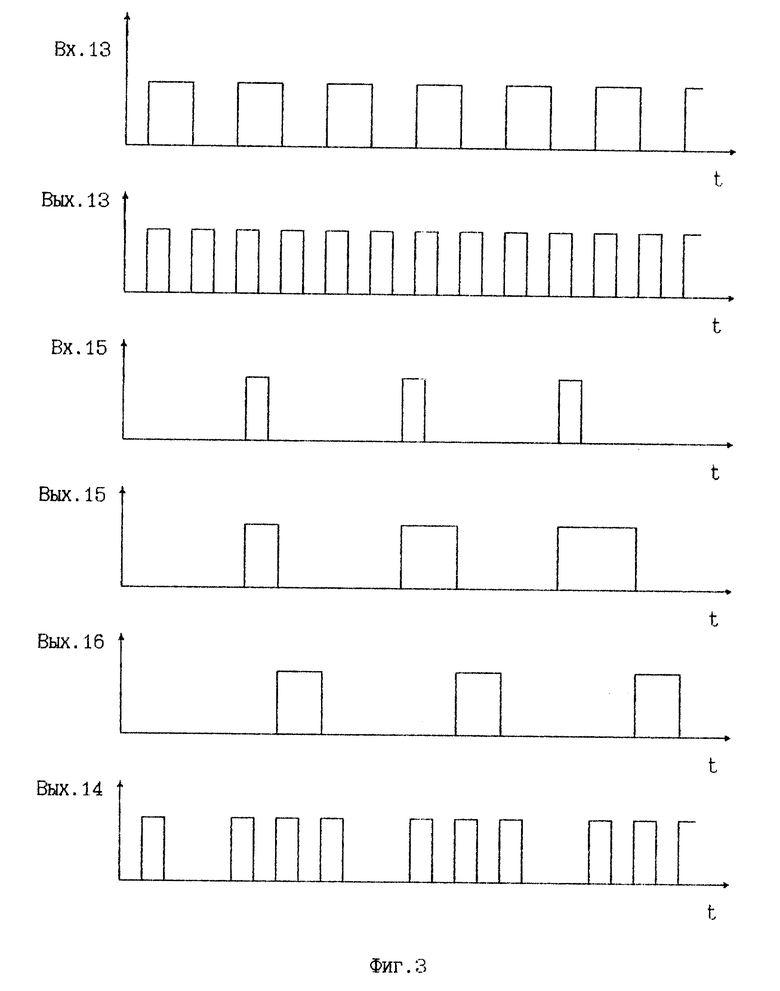
На фиг. 1 приведена структурная схема устройства автоматической подстройки девиации частоты; на фиг.2 показана функциональная схема сумматора. Временные диаграммы, поясняющие работу сумматора, приведены на графиках фиг. 3.
Устройство содержит кварцевый генератор импульсов стабильной частоты 1, выход которого подключен к входу делителя частоты 2. Выход делителя частоты 2 подключен к входу синхронизации управляемого генератора импульсов 3, одному входу сумматора частотных сигналов 4 и входу синхронизации преобразователя частоты в напряжение 5. Выход управляемого генератора 3 через сумматор 4 соединен с первым входом цифрового блока вычитания частот 6, второй вход которого подключен к выходу формирователя импульсов 7. Выход цифрового блока вычитания частот 6 соединен с информационным (управляющим) входом преобразователя частоты в напряжение 5, выход которого через фильтр низкой частоты 8 и усилитель переменного тока 9 подключен к одному из входов аналогового вычитающего устройства 10, другой вход которого объединен с аналоговым входом управляемого генератора импульсов 3 и является входом всего устройства. Выход аналогового вычитающего устройства 10 подключен к входу объекта подстройки 11, например гетеродина, выход которого соединен с входом формирователя импульсов 7 и является выходом всего устройства. Кроме того, аналоговые (опорные) входы управляемого генератора 3 и преобразователя частоты в напряжение 5 объединены и подключены к выходу источника опорного напряжения 12.
В схеме сумматора 4, показанной на фиг.2, применены ждущий мультивибратор 13, мажоритарный элемент 14, первый D-триггер 15 и второй D-триггер 16. Первый вход сумматора 4 подключен к входу установки нуля (R-входу) триггера 16 и одному входу мажоритарного элемента 14, а также через ждущий мультивибратор 13 соединен с вторым входом мажоритарного элемента 14 и со стробирующим входом (С-входом) триггера 16. Выход триггера 16 подключен к третьему входу мажоритарного элемента 14 и к R-входу триггера 15, инверсный выход которого соединен с D-входом триггера 16. Кроме того, стробирующий С-вход триггера является вторым входом сумматора, а D-вход этого триггера соединен с нулевой цепью. Выход мажоритарного элемента является выходом сумматора.
Устройство работает следующим образом. Входное модулирующее напряжение Uх подается на высокочастотный управляемый генератор 3 и одновременно через аналоговое вычитающее устройство 10 поступает на вход подстраиваемого гетеродина 11. Выходной частотный сигнал fг гетеродина 11 имеет синусоидальную форму и представляет собой сумму или разность двух составляющих - несущей частоты fн и девиации частоты Δf, которая в свою очередь зависит от чувствительности гетеродина Sг и ее относительной нестабильности γг: fг= fн+Δf(1+γг) = fн+Sг(1+γг)ΔU, где ΔU = Uх - Uос - напряжение на входе гетеродина 11, определяемое разностью входного напряжения Uх и напряжения цепи обратной связи Uос.
Частотный сигнал fг гетеродина 11 преобразуется в последовательность прямоугольных импульсов формирователем 7, выполняющим функцию триггера Шмитта, и поступает на один из входов цифрового блока вычитания частот 6, служащего для выделения разности двух частотных сигналов.
Одновременно входное напряжение Uх поступает на вход образцового управляемого генератора 3 и преобразуется в последовательность импульсов, частота fуг которых прямо пропорционально Uх и зависит от коэффициента преобразования Куг управляемого генератора 3 и его относительной нестабильности γ: fуг= Kуг(1+γ)Ux= fo(1+γ)Ux/Uo= Δf(1+γ).
Импульсы частоты fуг с выхода управляемого генератора 3 поступают на один из входов сумматора 4, на второй вход которого подаются импульсы стабильной высокой частоты fо с выхода делителя частоты 2, которым в Nдч раз уменьшается частота импульсов кварцевого генератора 1. На входе сумматора 4 формируется последовательность импульсов суммарной частоты: f4=fо+fуг, поступающих на второй вход цифрового вычитающего устройства 6. Сигнал разностной частоты f6= fуг-f4 с выхода вычитающего устройства 6 поступает на вход преобразователя частоты в напряжение 5. При этом на выходе преобразователя 5 формируется напряжение: Uпчн= f6Uo/fo= [fн-fo+Δf(1+γг)-Δf(1+γ)]Uo/fo, пропорциональное частоте f6 цифрового блока вычитания частот 6.
Для ускорения автоподстройки девиации частоты разность несущей fн и образцовой fо частот выбирают значительно больше максимальной девиации частоты Δfmax гетеродина по условию: (fн-fo) ≥ (3÷5)Δfmax, что позволяет существенно уменьшить постоянную времени фильтра низких частот 8, служащего для сглаживания пульсаций выходного напряжения Uпчн преобразователя частоты в напряжение 5.
Вследствие этого на выходе фильтра низкой частоты 8 формируется сигнал, содержащий сумму двух составляющих: постоянного напряжения, пропорционального разности частот (fн-fо), и переменного напряжения, пропорционального разности девиаций частот объекта подстройки (гетеродина) 11 и высокоточного управляемого генератора 3: U~= UoΔf(γг-γ)/fo.
Переменная составляющая выходного напряжения фильтра 8 усиливается с помощью усилителя переменного тока 9 и вычитается из входного напряжения Uх аналоговым вычитающим устройством 10. При этом за счет охвата объекта подстройки импульсной обратной связью по переменному току суммарная погрешность γг от нестабильности и нелинейности характеристики гетеродина 11 снижается пропорционально произведению коэффициентов преобразования усилителя переменного тока К9, фильтра низких частот К8 и преобразователя частоты в напряжение К5. В итоге выходная частота гетеродина 11 при выполнении условия К5К8К9>>1 определяется выражением: fг= fн+Δf(1+γг/K5K8K9+γ),
Особенность работы схемы сумматора заключается в том, что с помощью ждущего мультивибратора 13, срабатывающего как по переднему, так и по заднему фронтам импульсов частоты fо делителя частоты 2, производится двухкратное умножение частоты fо выходных импульсов делителя частоты 2. При этом триггер 15 срабатывает в моменты появления передних фронтов импульсов выходной частоты fуг управляемого генератора 3, а триггер 16 обеспечивает поочередное прохождение импульсов частот fо и fуг через мажоритарный элемент 14, на выходе которого формируется суммарная частота f4=fо+fуг независимо от взаимного расположения и совпадения фронтов входных импульсных сигналов (фиг.3).
Фактически в схеме сумматора (фиг.2) при частоте fуг=0 на выход мажоритарного элемента проходят все нечетные импульсы, формируемые ждущим мультивибратором 13 по передним фронтам импульсов частоты fо, а при появлении на втором входе сумматора 4 сигнала частоты fуг к этим импульсам добавляются с частотой fуг четные импульсы, формируемые ждущим мультивибратором 13 по задним фронтам импульсов частоты fо (фиг.3).
Нормальная работа сумматора (фиг. 2) обеспечивается при максимальной частоте управляемого генератора fуг.max ≤ fо и при выборе постоянной времени ждущего мультивибратора τ = RC ≤ 1/4fо.
Высокая точность устройства автоматической подстройки девиации частоты достигается за счет того, что в нем функцию образцового элемента (или меры) выполняет высокоточный управляемый генератор импульсов 3, называемый также преобразователем напряжения в частоту. Такие управляемые генераторы выпускаются серийно в виде микросхем (например, типа К1108ПП1), которые характеризуются погрешностью нелинейности менее (0,002 - 0,01)% в диапазоне частот до сотен кГц [4, c.309]. Однако непосредственно применение таких высокоточных управляемых генераторов в аппаратуре радиосвязи практически невозможно из-за несинусоидальной формы выходного импульсного сигнала, что приводит к расширению спектра частот и существенному влиянию на соседние каналы при передаче частотно-модулированных сигналов по линиям связи. Кроме того, несущая частота таких управляемых генераторов не превышает сотен кГц, что явно недостаточно для современных средств связи.
Снижение инструментальных погрешностей до уровня сотых долей процента обеспечивается в предложенном устройстве за счет использования одного источника опорного напряжения 12 и синхронизации стабильной частотой fо как управляемого генератора импульсов 3, так и преобразователя частоты в напряжение 5. Такое техническое решение позволяет снизить влияние нестабильности опорного напряжения Uо на точность формирования сигнала поправки. В частности, произведение коэффициентов преобразования управляемого генератора импульсов (Куг= КR3fо/Uо) и преобразователя напряжения в частоту (К5= КR5Uо/fо) не содержит составляющих опорного напряжения Uо и частоты fо (К3К5= КR3КR5), а зависит только от коэффициентов пропорциональности КR3, КR5, задаваемых в реальных схемах отношением сопротивлений стабильных резисторов.
К преимуществам предложенного устройства относится универсальность его применения в широком диапазоне несущей частоты fн объекта подстройки, поскольку для установки различных значений опорной частоты fо (т.е. стабилизации постоянной разностной частоты fн-fг и соответственно сохранения неизменного значения постоянной времени фильтра низкой частоты) достаточно переключить коэффициент деления Nдч делителя частоты 2.
Кроме того, в данном устройстве в отличие от всем известных схем за счет применения высокоточного и быстродействующего тракта импульсного преобразования входного сигнала в частоту достигается компенсация быстрых флюктуаций несущей частоты Δfн объекта подстройки (гетеродина), частота которых лежит в рабочем диапазоне девиации частоты Δf. Необходимо отметить, что такие быстрые флюктуации Δfн несущей частоты принципиально нельзя исключить во всех известных устройствах, реализующих автоподстройку по результатам аналоговых либо цифровых измерений выходной частоты гетеродина.
Формирование выходного сигнала, аналогичного и эквивалентного по форме рабочим сигналам объектов подстройки в режиме их эксплуатации, позволяет значительно повысить точность автоматической подстройки девиации частоты большинства ЧМ-генераторов синусоидальных колебаний коротковолнового и УКВ-диапазонов.
В предложенном устройстве все цифровые функциональные узлы: генератор импульсов 1, делитель частоты 2, сумматор 4, формирователь импульсов 7, цифровой блок вычитания частот 6 и преобразователь частоты в напряжение 5 могут быть собраны на быстродействующих КМОП-микросхемах серии КР1554, способных работать при частоте переключения до 150 МГц. В управляемом генераторе 3 может быть применена микросхема типа КР1108ПП1А, а в усилителе переменного тока - микросхемы К574УДЗ, К140УД1208. Источник опорного напряжения может быть собран на термостабильных маломощных стабилитронах типов КС406В, КС108В и т. п., а в схеме фильтра и аналоговом вычитающем устройстве могут быть применены термостабильные пассивные элементы - сопротивления типа С2-29В и конденсаторы типа К73П.
Следует отметить сравнительную простоту практической реализации предложенного устройства при кажущейся громоздкости ее структурной схемы (фиг.1). В частности, при экспериментальном моделировании предложенной схемы автоподстройки девиации частоты затраты на цифровую часть составили 6 микросхем серии К1554, а на аналоговую часть - 2 микросхемы (КР1108ПП1А - в управляемом генераторе импульсов и К574УД3 - в усилителе низкой частоты).
Источники информации.
1. Хоровиц П., Хилл У. Искусство схемотехники: в трех томах: Том 2. Пер. с англ. - М.: Мир, 1993, с.264 - 276, рисунок 9.81.
2. Павленко Ю.Ф., Шпаньон П.А. Измерение параметров частотно-модулированных колебаний. - М.: Радио и связь, 1986, с.16 (рисунок 2.2); с.115, рисунок 2.39.
3. А.с. N 726667, МПК Н 04 В 1/02, Н 03 С 3/00. Частотно-модулированный передатчик/ Андреев А.В., Вейс Г.Н., Порецкий В.Я. Опубл. в БИ, 1980, N 13.
4. Хоровиц П., Хилл У. Искусство схемотехники: в трех томах: Том 1. Пер. с англ. - М.: Мир, 1993, с.307-323.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕВИАЦИИ ЧАСТОТЫ | 1998 |
|
RU2138828C1 |
| УПРАВЛЯЕМЫЙ ДЕЛИТЕЛЬ ЧАСТОТЫ ИМПУЛЬСОВ | 2000 |
|
RU2175167C1 |
| СУММАТОР-ВЫЧИТАТЕЛЬ СТАРШИМИ РАЗРЯДАМИ ВПЕРЕД НА НЕЙРОНАХ | 2002 |
|
RU2205444C1 |
| РАДИОСПЕКТРОМЕТР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1991 |
|
RU2060507C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЧАСТОТЫ | 1998 |
|
RU2138829C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА СИГНАЛОВ РАДИОСТАНЦИЙ | 2001 |
|
RU2202853C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 1999 |
|
RU2162592C2 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР | 1995 |
|
RU2097785C1 |
| ЭЛЕКТРОМАГНИТНЫЙ МНОГОЧАСТОТНЫЙ СТРУКТУРОСКОП | 1999 |
|
RU2179312C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ УГЛОВЫХ ВЕЛИЧИН | 1997 |
|
RU2133451C1 |
Изобретение относится к радиотехнике и предназначено для повышения стабильности девиации частоты частотных модуляторов. Устройство содержит кварцевый генератор импульсов, делитель частоты, образцовый управляемый генератор, сумматор частотных сигналов, преобразователь частоты в напряжение, цифровой блок вычитания частот, формирователь импульсов, фильтр низкой частоты, усилитель переменного тока, аналоговое вычитающее устройство, объект подстройки (гетеродин) и источник опорного напряжения. В схеме сумматора применены ждущий мультивибратор, мажоритарный элемент и два D-триггера. Стабилизация девиации частоты, что является техническим результатом изобретения, обеспечивается за счет коррекции по результатам цифрового сравнения частот объекта подстройки и управляемого генератора. Для исключения эффекта наложения частотных сигналов в сумматоре применена разновременная синхронизация D-триггеров на удвоенной частоте. 1 з.п. ф-лы, 3 ил.
| Частотно-модулированный передатчик | 1976 |
|
SU726667A1 |
| Частотно-модулированный генератор | 1988 |
|
SU1601738A1 |
| Хоровиц П | |||
| и др | |||
| Искусство схемотехники.- М.: Мир, 1993, т.2, с.264-276, рис.981. | |||
