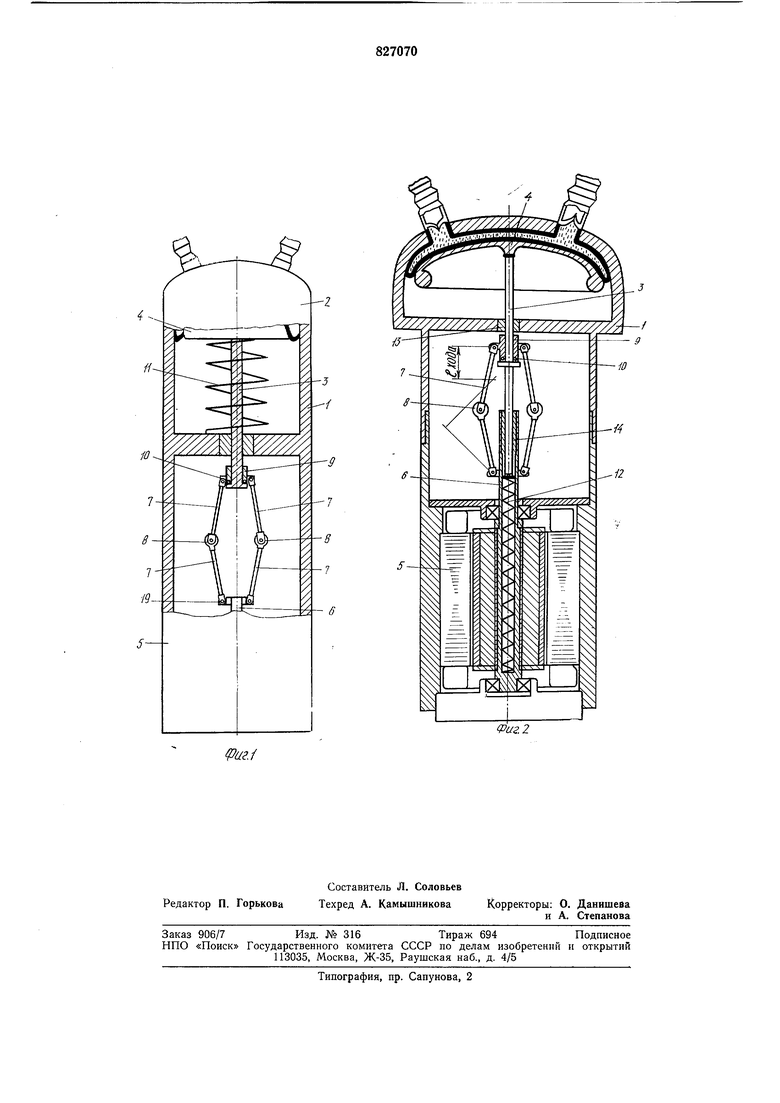
Искусственный желудочек сердца работает следующим образом.
При вращении вала 6 электродвигателя на рычаги 7 и грузы 8 действует центробежная сила Рц, иод действием которой при определенной частоте вращения
(Pn + F,,)iga,
где FH - усилие, иеобходимое для создания задаиного давления нагнетания;
пр - усилие пружииы; а, - угол между осью вала и иружииы,
и расстояние между осью вала и грузами увеличивается, ири этом щток 3 иеремещается совместно с мембраной 4. Таким образом осуществляется процесс нагнетания рабочей жидкости. Для осуществления обратного хода щтока необходимо уменьшить частоту вращения электродвигателя до такой величины, чтобы выполнялось условие
ц( )tga,
где FBC - усилие, необходимое для обеспечения заданного давления всасывания рабочей жидкости, после чего под действием пружины начинается сближение грузов 8, и щток 3 перемещается в обратном направлении. Для осуществления паузы, после нагнетания или всасывания, достаточно застабилизнровать частоту вращения электродвигателя на заданном уровне. Одновременно указанный уровень частоты вращения двигателя определяет величину хода щтока.
Достоинствами данного устройства являются исключение необходимости реверсирования двигателя, возможность регулирования закона изменения давления насоса, а легкая и точная регулировка объема выталкиваемого рабочего вещества за один цикл. Регулирование давления насоса осуществляется путем изменения частоты вращения электродвигателя, а регулировка объема выталкиваемого рабочего вещества за один цикл путем изменения диапазона
изменения частоты вращения (перепада частот вращения). Реализация указанных изменений легко осуществляется путем регулирования напряжения питания двиг.ателя.
При правильном выборе геометрии шарнирного механизма преобразователя движения, масс грузов и пружины удается достигнуть высоких энергетических, массогабаритных и динамических показателей. Так, в соответствии с расчетами время нагнетания может быть доведено до 0,03 с.
Таким образом, предлагаемая конструкция желудочка сердца обеспечивает независимое изменение длительностей систолы и диастолы в пределах 0,1-0,5 с, что приближает регулирование производительности искусственного сердца к естественному.
Формула изобретения
. Искусственный желудочек сердца с электромеханическим приводом, содержащий установленные в корпусе насосное устройство мембранного типа со щтоком,
электродвигатель и преобразователь движения, отличающийся тем, что, с целью приближения регулирования производительности искусственного сердца к естественному путем независимого изменения
длительностей систолы и диастолы, преобразователь выполнен в виде установленного между валом электродвигателя и штоком шарнирного рычажного механизма с закрепленными на каждом рычаге грузами, при
этом между щтоком и щарнирным рычажным механизмом установлена втулка, а между корпусом и мембраной - пружина. 2. Искусственный желудочек сердца по п. 1, отличающийся те.м, что вал электродвигателя выполнен полым, а пружина размещена в полости последнего. Источники информации, принятые во внимание при экспертизе I. Beckman J. et al The design and evalution of ventricles for AEC artificial heart nuclear power sour «TASAIO, Vol. 19 S. 545, 1973.
иг.2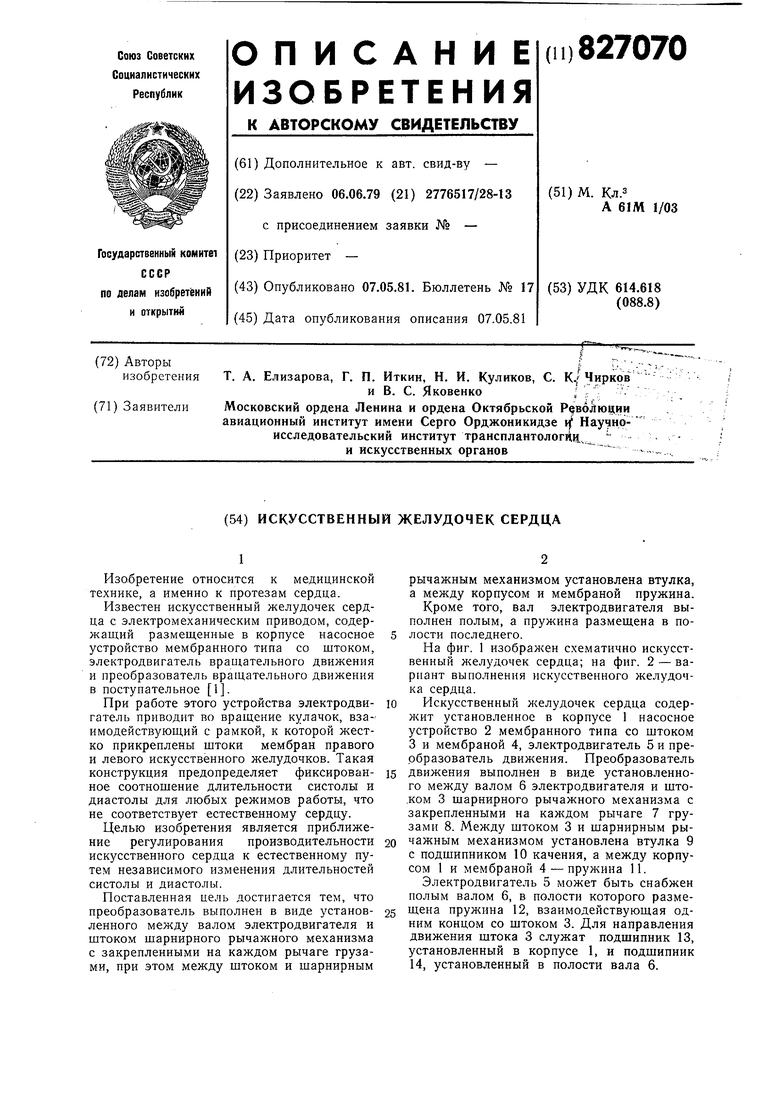

| название | год | авторы | номер документа |
|---|---|---|---|
| Искусственный желудочек сердца | 1983 |
|
SU1138168A1 |
| Насосное устройство с электромеханическим приводом | 1980 |
|
SU952262A1 |
| ИСКУССТВЕННЫЙ ЖЕЛУДОЧЕК СЕРДЦА | 1996 |
|
RU2115439C1 |
| ИСКУССТВЕННЫЙ ЖЕЛУДОЧЕК СЕРДЦА И СПОСОБ ЕГО РАБОТЫ | 2007 |
|
RU2360704C1 |
| Искусственный желудочек сердца | 1984 |
|
SU1192815A1 |
| Искусственный желудочек сердца | 1980 |
|
SU950401A1 |
| ИСКУССТВЕННОЕ СЕРДЦЕ | 1990 |
|
RU2046607C1 |
| Устройство для управления искусственным сердцем | 1986 |
|
SU1477418A1 |
| Искусственный желудочек сердца | 1979 |
|
SU865298A1 |
| Протез сердца с гидравлическим приводом | 1983 |
|
SU1438599A3 |