Изобретение относится к медицинской технике и может быть использовано в имплантируемых устройствах для частичной или полной замены насосной функции сердца
Цель изобретения - новьинепие КПД.
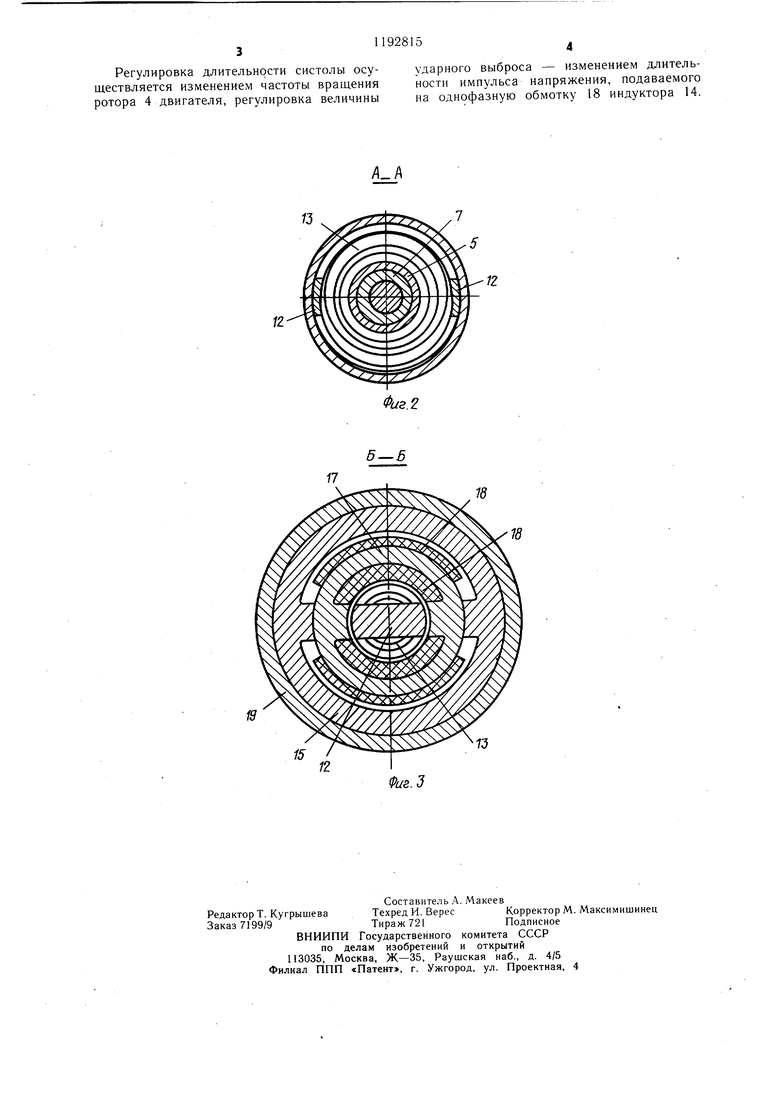
На фиг. 1 приведен искусственный желудочек сердца, продольный разрез, на фиг. 2 сечение А--А на фиг. 1; на фиг. 3 - сечепис Б-Б па фиг. 1.
Статор (якорь) 1 двигателя вынолпен ч виде зубцового магнитонровода с т-фазной обмоткой, соединенной, например, по схеме «звезда и запрессованной в корпус. Фазы обмотки якоря коммутируются полупроводниковыми ключами коммутатора (не показаны), которые переключаются в необходимой последовательности по сигна.1ам чувствительных элементов 2 датчика положения ротора (ДПР), установленных на статоре. В свою очередь чувствительные элементы 2 управляются ротором ЗДПР, жестко закрепленным на роторое 4 двигател я.
Ротор 4 представляет собой «сборную звездочку, которая неподвижно установлена па валу 5. Вал выполнен полым и на одном из его концов жестко закреплена гайка 6, а на другом - подшипник 7. Ротор 4 установлен в корпусе на подшипниках 8.
Внутрн полого вала размешен винт 9, который входит в зацепление с гайкой 6 и насосным устройством 0 (контакт винта с насосным устройством может осуществляться, наиример, с помощью шарика, свободно врашаюшегося в конусе, вынолненном на конце винта 9, или каким-либо другим способом).
В левой части випта 9, расположенного внутри по.юго вала 5 электродвигателя, имеется радиальная прорезь, которая в осевом направлении имеет длину, несколько большую длины рабочего хода винта (на 2-3 мм). В прорезь свободно входит фиксатор 11, который жестко закреплен на якоре 12. Якорь 12 выполнен из магнитомягкого материала, имеет, например, два явновыраженных нолюса (фиг. 3) и установлен в подшипнике 7. Кроме того, якорь 12 с помошью специальны.х выступов или какимлибо другим образом сочленен с одним концом плоской пружины 13, другой конец которой жестко закренлен на валу 5 (фиг. 1 и 2).
Индуктор 14 тормозного устройства установлен неподвижно в 1юдп ипниковом гците 15 (или корпусе 16 двигателя) и выполнен из магнитомягкого материала в виде замкнутого кольцевого ярма 17 (фиг. 2) с полюсами; на ярмо (или на зубцы) намотана однофазная обмотка 18.
Электродвигатель может быть закрыт крышкой 19, предохраняющей его от попадания инородных тел.
Устройство работает следующим образом.
При вращении двигателя, например, по часовой стрелке винт 9 под действием осевой составляющей силы, воздействующей га гайку 6 со стороны ротора 4 двигателя, перемещается слева направо, вывинчиваясь из полого вала двигателя и, воздействуя на насосное устройство 10, осуществляет цикл нагнетания (систола). При зтом вращение винта 9 вместе с ротором 4 предотвращается благодаря наличию фиксатора 11.
В свою очередь вращение фиксатора 11 5 предотвращается благодаря его жесткому соединению с якорем 12. Последний остается неподвижным из-за наличия электромагнитных сил, возникающих в зазоре между полюсами якоря 12 и индуктора 14. При этом для создания указанных электро.магнитных сил однофазная обмотка 18 индуктора 14 соединена с источником постоянного напряжения определенной величины (не показан). Вращение ротора 4.двигателя при неподвижном якоре 12 приводит к закручиванию 5 плоской пружины 13, закрепленной одним концом на валу 5 двигателя, а другим - на якоре 12.
По окончании систолы однофазная обмотка 18 индуктора 14 обесточивается. Это приводит к тому, что его якорь 12 освобождается и под действием пружины 13 начинает вращаться в ту же сторону, что и ротор 4 двигателя (т.е. по часовой стрелке). Вращение якоря 12 с фиксатором 11 приводит к
5 вращению винта 9 в том же направлении, в котором вращается ротор 4. При этом благодаря существенно меньщему моменту инерции винта 9 и якоря 12 по сравнению с моментом инерции ротора 4 частота вращения винта 9 достаточно быстро достигает
0 величины, большей частоты вращения ротора 4 и, следовательно, начинается обратное движение (ввинчивание) винта 9 (справа налево).
Обратное движение винта 9 (диастола)
- происходит до тех пор, пока частота его вращения не станет равной частоте вращения ротора 4. При достижении этого равенства ротор 4 двигателя, винт 9 и якорь 12 начинают вращаться «синхронно (диастолическая фаза заканчивается).
Повторно процесс нагнетания начинается в момент подачи напряжения на однофазную обмотку 18 индуктора 14. При этом якорь 12 застопоривается, что влечет за собой остановку вращения винта 9, и, следовательно, его перемещение в осевом направлении слева нанраво(систола),так как ротор 4 двигателя вращается с постоянной частотой- по часовой стрелке.
Регулировка длительности систолы осуществляется изменением частоты вращения ротора 4 двигателя, регулировка величины
ударного выброса - изменением длительности импульса напряжения, подаваемого на однофазную обмотку 18 индуктора 14.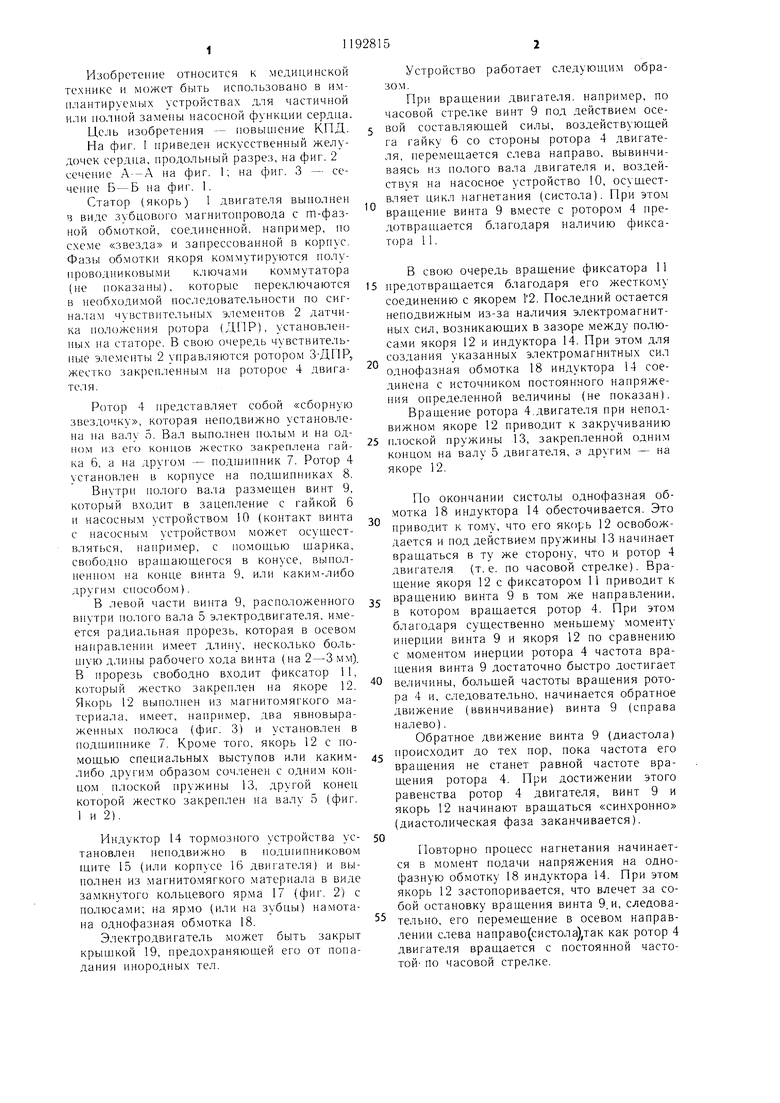
| название | год | авторы | номер документа |
|---|---|---|---|
| Искусственный желудочек сердца | 1983 |
|
SU1138168A1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ БЕСКОНТАКТНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437202C1 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2185018C2 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2436221C1 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437201C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МОДУЛИРОВАННОЙ МДС ЯКОРЯ | 2009 |
|
RU2414792C1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2407134C2 |
| Искусственный желудочек сердца | 1980 |
|
SU950401A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
ИСКУССТВЕННЫЙ ЖЕЛУДОЧЕК, СЕРДЦА с электромеханическим приводом, состоящий из корпуса.и установлнных в корпусе насосного устройства мембранного типа и привода, содержащего электродвигатель с полым валом, на выходном конце которого жестко закреплена гайка, и винт, расположенный внутри полого вала и входящий в зацепление с гайкой и насосным устройством, отличающийся тем, что, с целью повышения КПД, привод дополнительно снабжен установленным на электродвигателе и выполненным в виде замкнутого ярма с полюсами и однофазной обмоткой индуктором, запрессованным в свободный конец полого вала электродвигателя подшипником, смонтированным на последнем якорем с полюсами, жестко закрепленным на якоре фиксатором и плоской пружиной, один конец которой зафикi сирован на валу электродвигателя, а другой - на якоре, причем винт имеет продоль(Л ную прорезь, а фиксатор установлен с возможностью перемешения в последней. со ю 00 ел
15
18
18
73
| | Beckman J | |||
| etal | |||
| The design and evalutibn of ventricles for AEC artificial heart nuclear power sour «TASAO, vol | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Музыкальный инструмент со звучащими металлическими пластинками и ручной клавиатурой | 1922 |
|
SU545A1 |
| D | |||
| Chamber | |||
| Implantable energy system-for cardial assist divice | |||
| Artificial Heart Problem Conference Proceeding, s | |||
| СПОСОБ МНОГОКРАТНОГО РАДИОПРИЕМА | 1924 |
|
SU945A1 |
