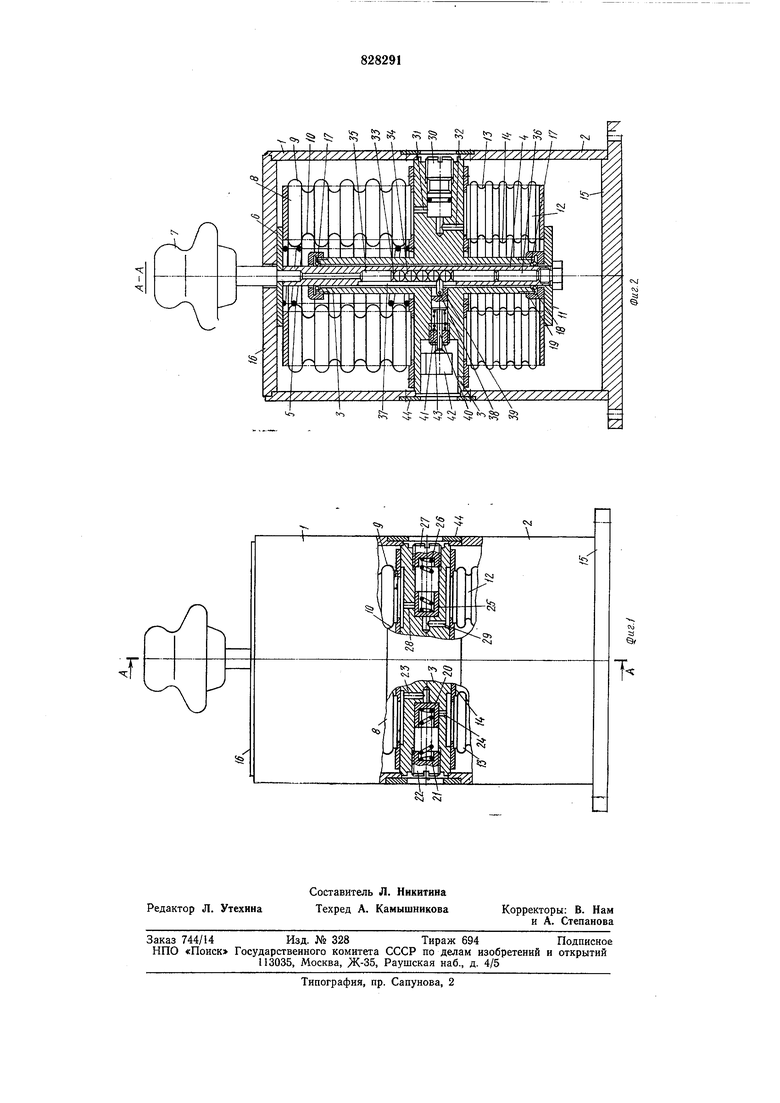
внутренней перегородкой 3, в центре которой проходит центральный нагрузочный стержень 4 с пружиной 5.
В верхней части стержень 4 через диск 6 связан со штыревым изолятором 7 и верхней гидравлической полостью 8, образованной сильфонами 9 и 10 и расположенной сверху на внутренней перегородке 3 корпуса.
В нижней части стержень 4 через диск 11 связан с нижней гидравлической полостью 12, образованной сильфонами 13 и 14 и расположепной снизу на внутренней перегородке 3 корпуса.
В подвесном варианте сборки (на чертежах не показан) крыпгки 15 и 16 корпуса меняются местами, а нижняя часть стержня 4 в этом случае соединяется и с нагрузочной бобышкой (па чертежах не показана), воспринимаюш,ей нагрузку.
Сверху и снизу центральное отверстие внутренней перегородки 3 имеет коническую поверхность 17, заполняемую после установки стержня 4 шариками 18, поджимаемыми к ней крышкой 19.
В радиальных расточках внутренней перегородки 3 корпуса размеш,ены плунжер рабочего хода 20 с пружиной 21 и регулировочным винтом 22, связанный через каналы 23 и 24 с верхней 8 и нижней 12 гидравлическими полостями; плунжер обратного хода 25 с пружиной 26 и регулировочным винтом 27, связанный с гидравлическими полостями 12 и каналами 28 и 29; дополнительный регулируемый плунжер 30, связанный каналами 31 и 32 с полостями 8 и 12.
Стержень 4 имеет внутреннюю полость 33, заполняемую шарами 34 и сменными вставками 35 и 36, и паз 37, через который одпосторонне откидываюш,аяся на оси 38. Подпружиненная собачка 39 ползуна 40 с пружиной 41 осуществляет взаимосвязь шаров 34 с конечником 42 считываюш,его устройства.
Поджатие ползуна 40 осуществляется пружиной 41 через регулировочную гайку 43.
Доступ к регулировочным органам устройства осуществляется через соответствующие окна кожуха 44, установленного на корпусе с возможностью проворота.
Работе датчика предшествует следующая наладка:
а)по полезной нагрузке;
б)по возвратной нагрузке;
в)по фазе выходного сигнала.
Настройка по полезной и возвратной нагрузкам осуществляется путем обеспечения необходимых усилий поджатия соответствующих плунжеров. При настройке по полезной нагрузке необходимое усилие пружины
21 поджатия плунжера рабочего хода 20 достигается регулировочным винтом 22. При настройке по возвратной нагрузке необходимое усилие пружины 26 поджати плунжера обратного хода 25 достигается регулировочным винтом 27.
Настройка по форгие выходного сигнала осуществляется закладкой соответствующего числа формирующих сигнал элементов 34 в полость 33 стержня 4 и установкой соответствующих длин вставок 35. После этого осуществляется контроль формы выходпого сигнала, для чего перемещением плунжера 30 обеспечивают сообщение полостей 8 и 12 через капалы 31 и 32 и производят рабочий ход без полного нагружения. В результате получают форму выходного сигнала и вносят по мере необходимости соответствующие коррективы. По окончании этой операции перемещением плунжера 30 производят разобщение полостей 8 и 12.
После выполнения указанных мероприятий датчик готов к работе.
Датчик работает следующим образом.
По мере образования отложений на проводах сила тяжести их через стержень 4 и диск 6 передается на полость 8, внутри которой возрастает давление рабочей жидкости, воздействующей через канал 23 на плунжер рабочего хода 20, поджатый пружиной 21. При равенстве действующих на плунжер 20 силовых воздействий обеспечивается отрыв его от посадочного гнезда и за счет значительного увеличения при этом площади контакта с рабочей жидкостью по сравнению с площадью входпого сечения отверстий канала 23 плунжер 20, преодолевая усилие пружины 21, надежно удерживается в положении, обеспечивающем беспрепятственное перетекание рабочей жидкости под воздействием полезной нагрузки из полости 8 в полость 12 через каналы 23 и 24 и пространство, освобожденное плунжером 20.
Стержень 4, совершая рабочий ход по мере перетекания рабочей жидкости из полости 8 в полость 12, обеспечивает и одновременное перемещение формирующих сигнал элементов 34, которые, воздействуя на собачку 39 и преодолевая усилие пружины 41, перемещают плунжер 30, воздействующий на конечник 42 считывающего устройства. В результате формируется выходной сигнал, несущий информацию о предварительной ситуации на конкретном участке линии. При получении этого сигнала диспетчер дает указания о принятии мер по освобождению проводов.
После освобождения проводов нагрузка со стержня 4 снимается, давление рабочей жидкости в верхней полости падает и плунжер 20 под воздействием пружины 21 возвращается в исходное положение, разобщая при этом гидравлические полости. Поддейстием возвратной пружины 5 через стержень 4 и диск 11 возрастает давление жидкости в полости 12, в результате чего плунжер обратного хода 25, преодолевая усилие
ЬРужйны 26, осуществляет сообщение между полостями 8 и 12, обеспечивая обратное перетекание жидкости через каналы 28 и 29.
При перемещении стержня 4 вверх одноtTOpOHHe откидывающаяся собачка 39 поворачиваетёй вокруг оси 38, передавая воздействие на считывающее устройство.
При обратном ходе стержня 4 усилие п)ужины 5 уменьшается давление рабочей жид1кости в полости 12 падает, и наступает MoMeHt, когда УСИЛИЯ пружины 26 хватает, чтобы преодолеть напор рабочей жидкости и переместить плунжер 25 в первоначальное положение. При этом все элементы принимают свое первоначальное положение.
В этом режиме (релейном) работы датчика он срабатывает при достижении полезной нагрузкой на приводах определенного уровня. Другой режим работы датчика характеризуется постоянным слежением за уровнем роста нагрузок.
Для перевода датчика из одного режима работы в другой служит плунжер 30, положение которого обеспечивает либо сообщение между гидравлическими полостями 8 и 12, либо разъединение.
Формула изобретения
1. Датчик гололедных нагрузок, содержащий корпус с крышками и двумя гидравлическими полостями, сообщающимися через подпружиненные плунжеры рабочего и обратного ходов, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, датчик снабжен сильфонами и центральным подпружиненным нагрузочным стержнем, причем корпус выполнен с внутренней перегородкой, в радиальных расточках которой размещены плунжеры рабочего и обратного ходов, а гидравлические полости образованы сильфонами, коаксиально расположенными по обе стороны внутренней перегородки и связанными с центральным подпружиненным нагрузочным стержнем, выполненным с внутренней
полостью.
2.Датчик по п. 1, отличающийся тем, что он снабжен формирующим сигнал элементом, состоящим из шаров, расположенных во внутренней полости нагрузочного стержня, а внутренняя перегородка с двух сторон центрального отверстия выполнена с конусной фаской.
3.Датчик по пп. 1 и 2, о т л и ч а ю щ и йс я тем, что он снабжен дополнительным
регулируемым плунжером, расположенным в радиальной расточке внутренней перегородки, связанной каналами с гидравлическими полостями.
4.Датчик по пп. 1-3, отличающийс я тем, что он снабжен по крайней мере
одним считывающим устройством, выполненным в виде односторонне откидывающейся подпружиненной собачки, кинематически связанной с формирующим сигнал элементом полого центрального стержня.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 402931, Н 02G 7/16, 1971. 2. Авторское свидетельство по заявке № 2604756/25-07, Н 02G 7/16, 1979 (прототип). , « S I 7 T I 5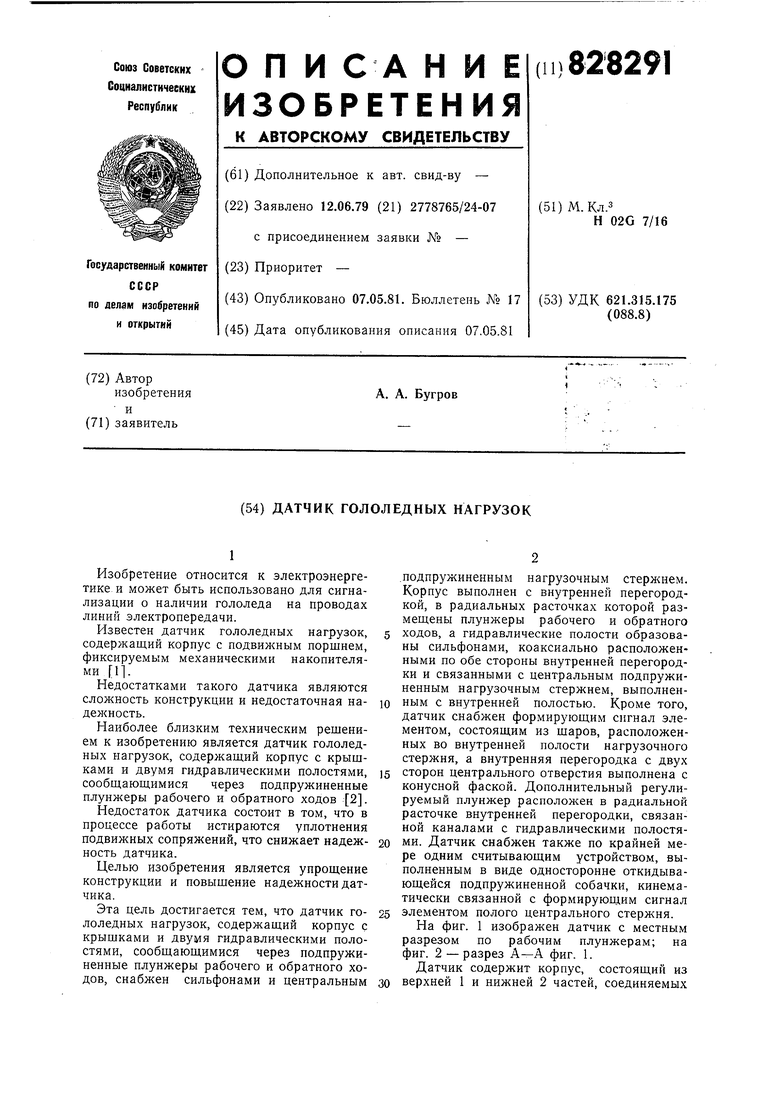
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик гололедных нагрузок | 1976 |
|
SU584380A1 |
| ГИДРОПРИВОД | 2014 |
|
RU2579306C1 |
| АМОРТИЗАТОР | 2005 |
|
RU2277651C1 |
| Датчик гололедных нагрузок | 1978 |
|
SU752587A1 |
| Гидравлический замыкающий датчик | 2021 |
|
RU2777503C1 |
| РУЛЕВАЯ МАШИНА | 1990 |
|
RU2034747C1 |
| Устройство для гашения ударных нагрузок | 1989 |
|
SU1763750A1 |
| Ударный узел бурильной машины с гидроприводом | 1982 |
|
SU1051259A1 |
| Гидропневматический амортизатор | 1979 |
|
SU856877A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2237826C2 |