Изобретение относится к горной промышленности, а именно к системам управления буровыми машинами, в частности буросбоечными машинами и станками для бурения дегазационноувлажнительных скважин. Известна система управления буровой машиной, содержащая питатель буровых штанг и клапаны управления обеспечивающие возможность дистанционного наращивания бурового става в процессе бурения D-l . Недостатком системы является то что дистанционное управление процес сом наращивания бурового става може производиться только с расстояния, обеспечивающего прямую видимость об екта управления. При этом не обеспечивается безопасность обслуживани персоисша в случае выброса угля и газа из буримой скважины. Известна также система автоматического управления буровой машиной содержащая магистральный пускатель пульт дистанционного управления, кл даны1управления механизмом подачи вперед и назад, движения питателя вперед и назад закрытием и открытием подхвата, пускатели двигателя вращателя вправо и влево, датчики переднего и заднего положения механизма подачи, две ячейки памятиГ23. Данная система обеспечивает автоматическое управление машиной в процессе выполнения только одной операции, а именно буре«ия шпура на длину сдной штанги, однако задачу автоматического наращивания бурового става она не решает, что существенно снижает производительность бурения. Цель изобретения - повьменке производительности бурения, безопасности обслуживающего персонала при бурении скважин. Эта цель достигается тем, что система снабжена датчиками переднего и заднего положения механизма питателя дополнительным датчиком положения механизма подачи, датчиками закрытого и открытого положения . подхвата, датчиком наличия штанг тремя логическими элементами ИЛИ, логическим элементом И и пятью дополнительными ячейкамя памяти, выход каждой последующей из которых соединен с первым входом предьщущей ячейки памяти, щричем выходы первой и пятаЛ ячеек памяти через первый логический элемент ИЛИ также соединены
с клапаном управления механизмом подачи и пускателем двигателя вращателя вправо, выход второй ячейки памяти - с клапаном управления закрытием подхвата, выход третьей ячейки с клапаном управления механизмом подачи назад и пускателем двигателя вращателя влево, выход четвертой ячейки - с клапаном управления движением питателя вперед и с одним из входов второго логического элемента ИЛИ, другой вход которого подключен к датчику наличия штаМг, выход шестой ячейки - с клапаном управления движением питателя назад, выход седьмой ячейки - с клапаном управления открытием подхвата, а вторые входы ячеек памяти подключены соответственно к датчикам открытого положения подхвата, переднего положения механизма подачи, закрытого положения подхвата, заднего положения меха.низма подачи, переднего положения питателя, к дополнительному датчику положения механизма подачи, к датчику заднего положения питат-.еля, магистральный пускатель через логический элемент И соединен со вторым и третьим логическими элементами ИЛИ, входы последнего соединены с пультом дистанционного управления и выходом магистрального пускателя.
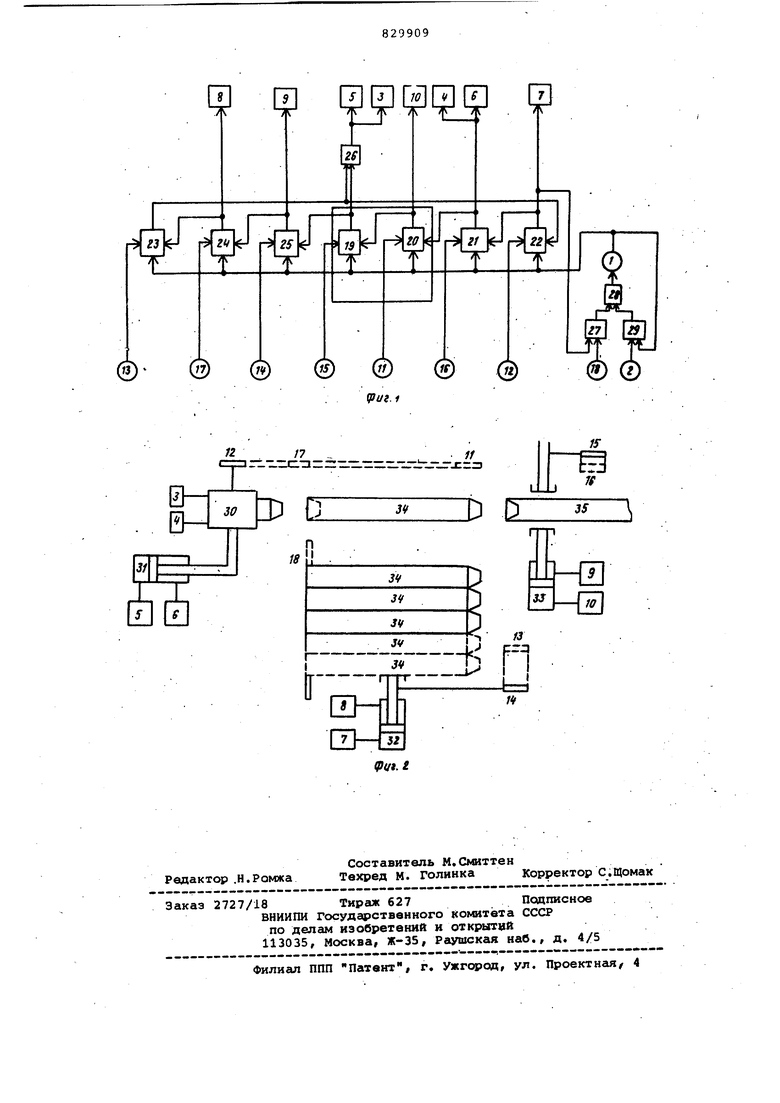
На фиг. 1 приведена блок-схема ситемы,- на фиг. 2 - схема буровой машины с клапанами управления и датчиками.
Система управления буровой машиной содержит (см.фиг.1) магистральный пускатель 1, -включенный в шахтную сеть питания, пульт 2 дистанционого управления магистральным пускателем, пускатели 3 и 4 двигателя вращателя вправо и влево, клапаны управления механизмами подачи вращателя вперед 5 и назад б, движения питателя 7 вперед и8 назад, механима подхвата 9 - открыть и 10 - закрыть, установленные на машине.датчики крайних положений механизма подачи 11 - переднее,12 - заднее, механизма питателя 13 - переднее, 14 - заднее, механизма подхвата 15 открыт, 16 - закрыт, датчик 17 положения механизма подачи вращателя в момент соединения штанг, датчик 18 наличия штанг в магазине питателя, блок бурения с ячейкс1ми памяти выполнения операций бурения 19, закрытия подхвата - 20, дополнительные ячейки памяти возврата механизма подачи вращателя назад - 21 вьщвижки питателя вперед - 22, соединения штанг - 23, возврата питателя назад - 24, открытия подхвата 25. Датчики 4D-16 соединены с соответствующими включающими ахсзда11И ячеек памяти 19-25, отключающие входы которых соединены с выходами
последующих ячеек памяти. Выходы ячеек памяти 20 - 22 и 24 соединены соответственно с клапанами управления 6-10 и с пускателем.4 двигателя вращателя влево, а выходы ячеек-па- мяти 19 и 23 соединены через логический элемент ИЛИ 26. с клапаном 5 подачи врсщателя вперед и с пускателем 3 двигателя вращателя вправо. Датчик 18 наличия штанг в магазине питателя
включен через логический элемент ИЛИ
27 к логический элемент И 28 в цепь управления магистральным пускателем 1. Второй вход элемента ИЛИ 27 соединен с выходом ячейки памяти 22 вьщвижки питателя вперед. Пульт 2 дистанционного управления подключен ко второму входу логического элемента И 28 через третий логический элемент ИЛИ 29, второй вход которого соединен с выходом магистрального пускателя 1.
0 Буровая машина содержит вращатель 30, гидроцилиндр подачи вра1;ателя 31, гидроцилиндр питателя штанг 32, гидроцилиндр подхвата бурового става 33, буровые штанги в питателе 34 и буровой став 35 в подхвате. Управление вращателем 30 осуществляется пускателями 3 и 4, первый из которых обеспечивает правое вращение шпинделя, а Второй - левое. Управление гидроцилиндром подачи вращателя 31 осуществляется клапанами управления 5 и б, первый из которых обеспечивает подачу вращателя вперед, а второй назад. Переднее положение вращателя фиксируется датчиком 11, заднее 5 датчиком 12, а промежуточное положение, соответствующее моменту соединения новой штанги 34 со шпинделем вращателя и с буровым ставом 35 датчиком 17.
0Управление гидроцилиндром питателя 32 осуществляе- ся клапанами управления 7 и 8, обеспечивакяцими соответственно вьщвижение питателя вперед и наз.ад. В переднем положе5 НИИ питателя включается датчик 13, а в заднем - датчик 14. .
.Управление гидроцилиндром подхвата 33 осуществляется клапанами 9 и 10, первый из которых обеспечивает
Q открытие, а второй - закрытие подхвата, в открытом положении подхвата включается датчик положения 15, а в закрытом - датчик 16.
Система автоматического управления буровой машиной работает следуюим образом.
Включение магистрального пускателя 1 в работу осуществляется с пульта 2 дистанционного управления
при условии наличия штанг 34 в магазине питателя (датчик наличия штанг 18 включен). В этом случае на выходе логического элемента И 28 формируется сигнал включения магистрального пускателя. Магистральный пускатель 1 остается включенным после снятия пускового сигнала, поступаю щего от пульта 2 дистанционного уп равления, благодаря связи второго да логического элемента ИЛИ 29 с вы ходом магистрсшьного пускателя 1, Отключение системы с. пульта упр ления, при необходимости прервать ее работу, осуществляется кнопкой Стоп, соединенной с третьим входом логического элемента И 28 (на фиг. 1 не показано). При нажатии кнопки Стоп на этом входе исчезает сигнал. На выходе логического элемента И 28 также исчезает сигнал и магистральный пускатель 1 от чается. Пусть в момент пуска буровой маи ны механизм подачи вращателя находи ся в заднем положении, питатель с новой штангой выдвинут вперед, под.хват -V закрыт. Все ячейки памяти, з исключением ячейки памяти 23 соеди ния штанг, отключены. После включения магистрального пускателя 1 с вы да ячейки памяти 23 через логически элемент ИЛИ 26 питание поступает на клапан управления подачей вращателя вперед 5 и пускатель вращателя вправо 3. В процессе поступательного и вра щательного движения шпиндель вращателя навинтится на новую штангу, а- затем соединяет ее с хвостовой частью бурового става, зажатой в по хвате, в момент соединения штанги со ставом срабатывает датчик 17, включающий ячейку памяти 24. Выходной сигнал с ячейки 24 поступает на отключающий вход ячейки памяти 2 и включение клапана управления 8 механизма питателя назад. Ячейка па мяти 23 отключается, отключая клапан 5 управления подачей вращатеЛя вперед и пускатель 3 двигателя вращателя вправо. Питатель возвращается в заднее положение, и в момент срабатывания датчика 14 подается сигнал включения ячейки памяти 25. С выхода включившейся ячейки памяти 25 поступает сигнал на отключение ячейки памяти 24 и на включение клапана 9 управления открытием подхвата. Ячейка памяти 24 отключается и отключает клапан 8 управлени движением питателя назад. Подхват открывается, освобождая буровой став от зажима. В момент срабатывания датчика 15 открытия подхвата включается ячейка памяти 19, сигнал с выхода которой отключает ячейку памяти 25 и через логический элемент ИЛИ 2бвключает клапан 5 управления механизмом подачи впере и пускатель 3 двигателя вращателя вправо. Производится бурение скважи на длину одной штанги 34. В конце операции бурения, когда механизм по чи вращателя находится в крайнем пе реднем положении, срабатывает датчик 11, включающий ячейку памяти 20. Сигнал с выхода ячейки отключает ячейку памяти 19, а вместе с ней клапан 5управления подачей вращателя вперед и пускатель 3 двигателя вправо и включает клапан 10 управления закрытием подхвата. Бурение скважины прекращается, буровой став устанавливается в подхват. Датчик 16, контролирующий . закрытие подхвата, срабатывает в момент зажатия бурового става и подает сигнал включения ячейки памяти 21, которая, включившись, отключает ячейку памяти 20, а вместе с ней клапан 10 управления закрытием подхвата и включает пускатель 4 двигателя йращателя влево и клапан 6 управления подачей вращателя назад. Происходит вывинчивание шпинделя вращателя из хвостовика штанги бурового става, Зс1жатого в подхвате, и отвод вращателя в заднее положение. В крайнем заднем положении вргицателя срабатывает датчик 12, включающий ячейку памяти 22. Выходной сигнал с этой ячейки отключает ячейку памяти 21, а вместе с ней пускатель 4 двигателя вращателя влево и клапан 6управления подачей назад, и включает клапан 7 управления выдвижкой питателя вперед. Производится выдвижка питателя с новой штангой 34 на линию бурения. В переднем положении питателя срабатывает датчик 13, который включает ячейку памяти 23. Выходной сигнал с ячейки памяти 23 отключает ячейку памяти 22, а с ней и клапан 7 управления движением питателя вперед, и включает через логический элемент ИЛИ 26 клапан 5 управления подачей враицателя вперед, и пускатель 3 двигателя .вращателя вправо. Система управления в дальнейшем повторяет вышеописанный цикл работы до тех пор, пока в магазине питателя не кончатся штанги. В момент выхода последней штанги из магазина питателя отключается датчик 18 наличия штанг и сигнал на его выходе исчезает. Однако сигнал на выходе логического элемента ИЛИ 27 сохраняется, так как на второй его вход подается сигнал с ячейки памяти 22, управляющей выдвижкой питатель вперед и находящейся в этот период во включенном состоянии. Магистральный пускатель 1 отключится только после выдвижки питателя в переднее положение и установки последней штанги на лиНИИ-бурения, т.е. когда отключается ячейка памяти 22 и исчезает сигнал на втором вхсде логического элемента ИЛИ 27. Даннс1Я система управления обеспечивает автоматизацию процесса наращивания бурового ставка и за счет этого позволяет повысить производительность работы буровой машины/ сократив время выполнения операций по обмену игганг, выполняемых на сущес тву1ощих буровых машинах вручную. Система управления снижает трудоемкость бурения и обеспечивает безопасность обслуживаюсцего персонала, исключая необходимость присутствия людей возле машины в процессе бурени что позволяет использовать буровую маииину с предложенной системой управ ления для бурения СКВс1ЖИН в ВЫбрОСОопасных пластах, где по требованиям правил безопасности персонал, обслуживающий машину в процессе ее работы должен находиться в укрытии, .исключа щем поражение при внезапно) выбросе угля и газа из буримой скважины. Формула изобретения Система автоматического управлени буровой машиной, содержащая магистральный пускатель, пульт дистанционного управления, клапаны управления механизмом псщачи вперед и назад, движения питателя вперед и назад, зак илтием и открытием подхвата, пускатели двигателя вращателя вправо и влево, датчики переднего и заднего положения механизма подачи, две ячей ки памяти, отличающаяся тем, что, с целью повышения производительности бурения, она снабжена датчиками переднего и заднего положения механизма питателя дополнитель ным датчиком положения механизма подачи, датчиками закрытого и открытого положения подхвата, датчиком наличия штанг, тремя логическими элементами ИЛИ, логическим элементом И и пятью дополнительными ячейками памяти/ выход каждой последующей из котсфых соединен с первым входом предьадущей ячейки памяти, причем выходы первой и пятой ячеек памяти через первый логический элемент ИЛИ также соединены с клапаном управле7 ния механизмом подачи и пускателем двигателя вращателя вправо, выход второй ячейки памяти - с клапаном управления закрытием подхвата, выход третьей ячейки - с клапаном управления механизмом подачи назад и пускателем двигателя вращателя влево, выход четвертой ячейки - с клапаном управления движением питателя вперед и с одним из входов второго логического элемента ИЛИ, другой вход которого подключен к датчику наличия штанг, выход шестой ячейки - с клапаном управления движением питателя назад, выход.седьмой ячейки - с клапаном управления открытием подхвата, а вторые входы ячеек памяти подключены соответственно к датчикам открытого положения подхвата, переднего положения механизма .подачи, закрытого положения подхвата, заднего положения механизма подачи, переднего положения питателя, к дополнительному датчику положения механизма подачи, к датчику заднего положения питателя, магистрсшьный йускатель через логический элемент И соединен со вторым и третьим логическими элементами ИЛИ, входы последнего соединены с пультом дистанционного управления и выходом магистрального пускателя. Источники информации,принятые во внимание при экспертизе 1. Братченко Б.Ф. Машины и оборудование для проведения горизонтальных и наклонных горных выработок.М., Недра, 1975, с. 156. -2. Авторское свидетельство СССР 600296, кл. Е 21 С 5/00, 1975 (прототип).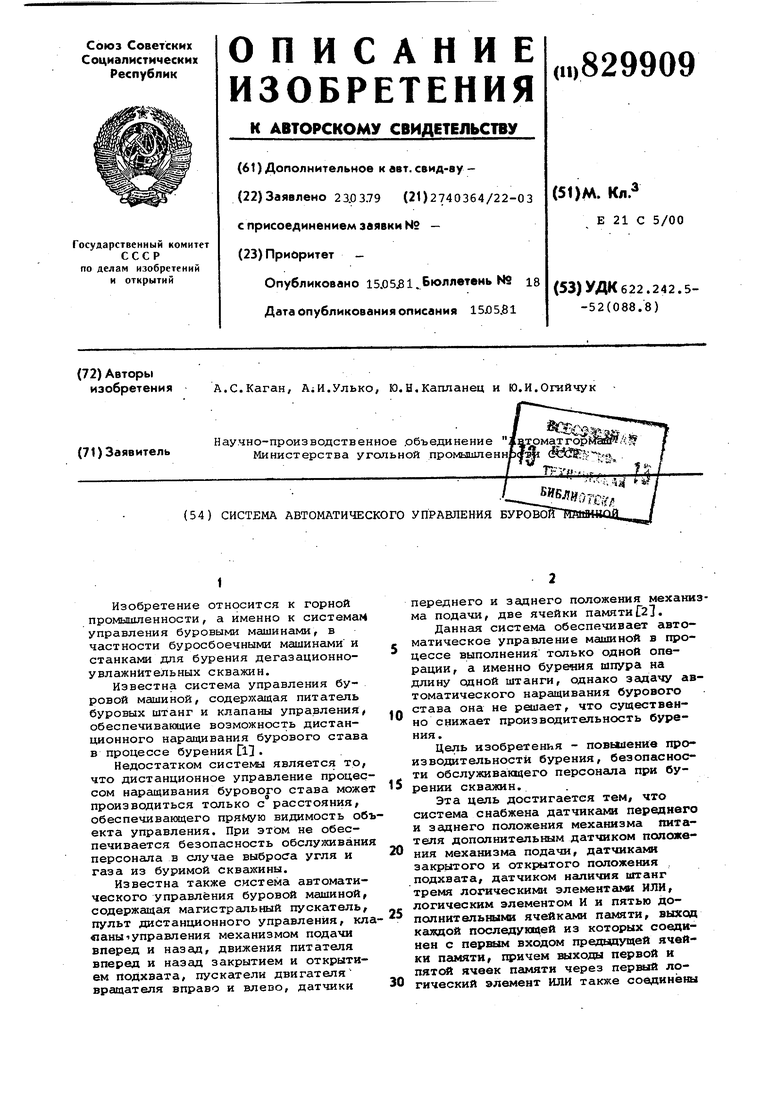
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления буровым станком | 1980 |
|
SU929826A1 |
| Система управления буровым станком | 1982 |
|
SU1065585A2 |
| Система управления буровым станком | 1982 |
|
SU1059148A1 |
| Система автоматического и дистанционного управления буровым станком | 1980 |
|
SU937713A1 |
| Система управления бурильной установкой | 1984 |
|
SU1218085A1 |
| Патрон бурового станка | 1981 |
|
SU950891A1 |
| Патрон бурового станка | 1977 |
|
SU739228A1 |
| Буровой станок | 1974 |
|
SU567809A1 |
| Способ разбуривания восстающих скважин | 1988 |
|
SU1588856A1 |
| БУРОВОЙ СТАНОК | 1966 |
|
SU185307A1 |