Изобретение относится к горной промышленности, в частности к системам управления бурильными установками для выбуривания разгружающей щели в особо выбросо- опасных забоях.
Целью изобретения является повыщение производительности при выбуривании разгружающей щели.
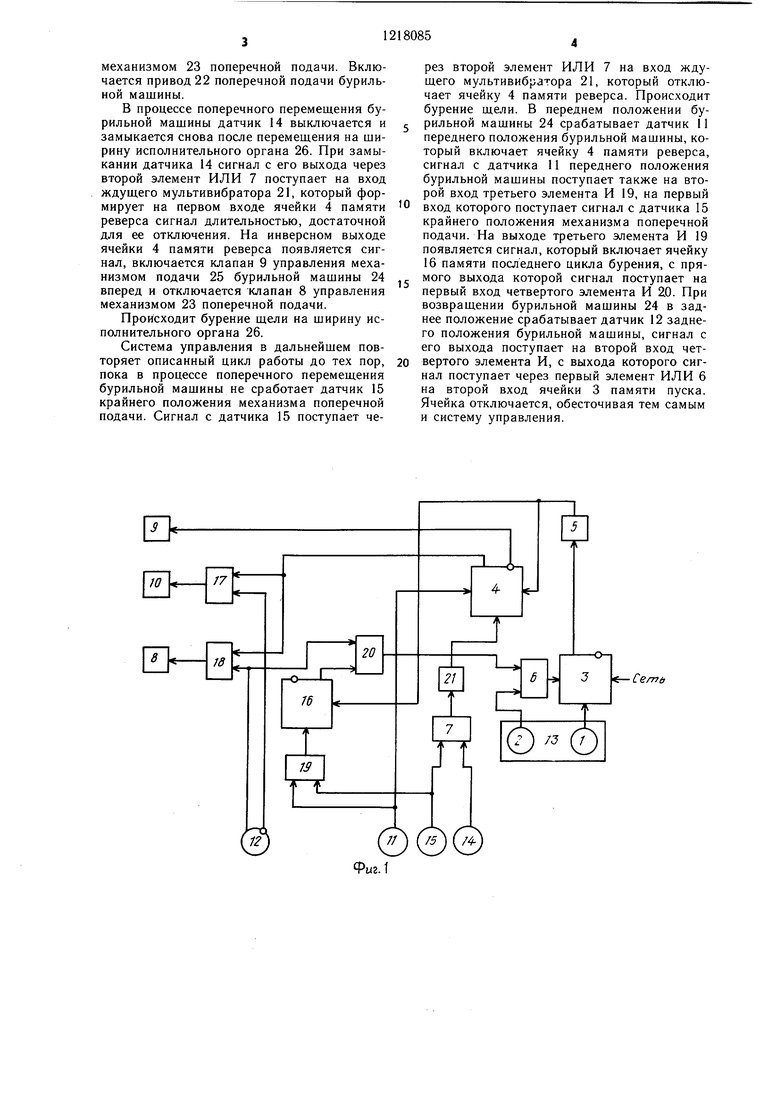
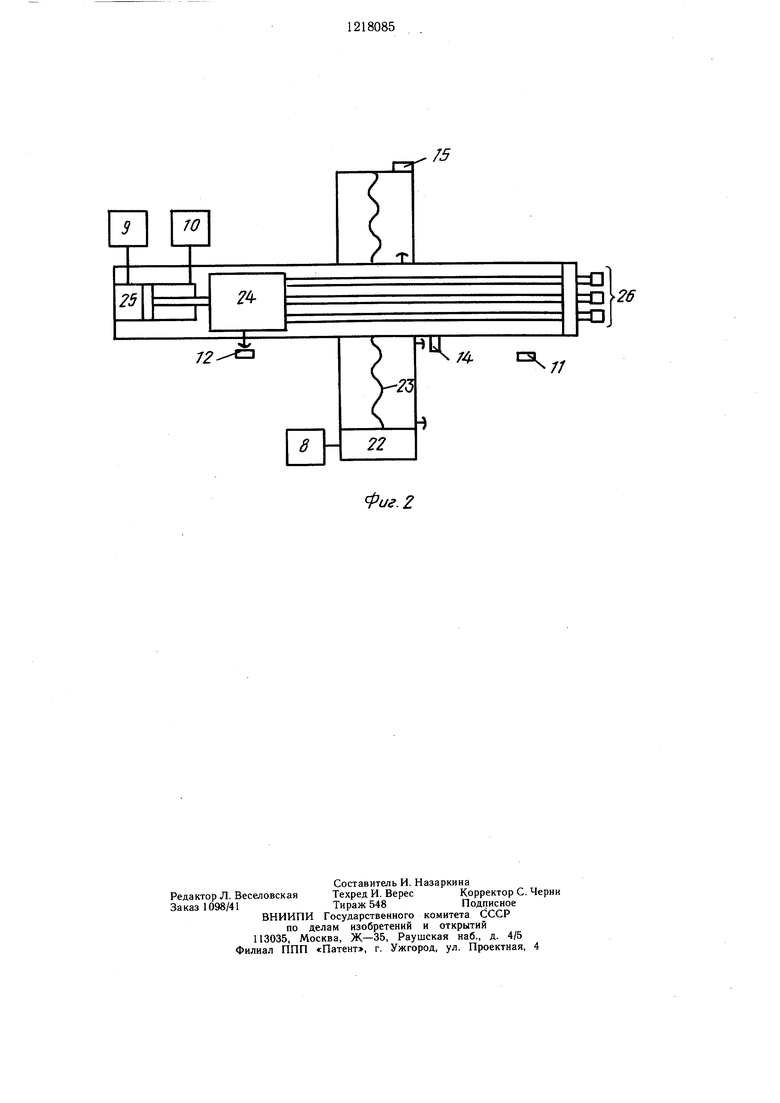
На фиг.1 представлена блок-схема системы управления; на фиг.2 - схема бурильной установки.
Система управления бурильной установкой содержит (фиг.1) кноки «Пуск« 1 и «Стоп 2, ячейки 3 и 4 памяти пуска и реверса соответственно, пускатель 5 двигателя бурильной мащины, первый 6 и второй 7 элементы ИЛИ, клапаны 8-10 управления подачами бурильной мащины (поперечной, вперед и назад соответственно), датчики переднего 11 и заднего 12 положения бурильной машины, дистанционный пульт 13 управления, который располагается на безопасном от выбросов расстоянии и на котором установлены кнопки «Пуск 1 и «Стоп 2, датчики 14 и 15 шага передвижки крайнего положения поперечной подачи соответственно, ячейку памяти 16 последнего цикла бурения, четыре элемента И 17-20, ждущий мультивибратор 21. Причем выход кнопки 1 соединен с первым входом ячейки 3 памяти, выход которой соединен с входом пускателя 5. Выход кнопки 2 соединен с первым входом первого элемента ИЛИ 6, выход которого соединен с вторым входом ячейки 3 памяти.
Выход ждущего мультивибратора 21 соединен с первым входом ячейки 4 памяти, а вход через второй элемент ИЛИ 7 - с датчиками 14 и 15. Выход пускателя 5 соединен с входами питания ячеек 4 и 16 памяти. Инверсный выход ячейки 4 памяти соединен с клапаном 9, а прямой выход - с первыми входами первого 17 и второго 18 элементов И. На второй вход первого элемента И 17 подключен инверсный выход датчика 12, прямой выход которого соединен с вторым входом второго элемента И 18 и вторым входом четвертого элемента И 20. На входы третьего элемента И 19 подключены датчики 11 и 15, а его выход соединен с первым входом ячейки 16 памяти. Прямой выход ячейки 16 памяти соединен с первым входом четвертого элемента И 20, выход которого подключен к второму входу первого элемента ИЛИ 6, выход которого соединен с вторым входом ячейки памяти 3. Клапаны 10 и 8 подключены соответственно к выходам первого 17 и второго 18 элементов И.
Бурильная установка (фиг.2) содержит привод 22 и механизм 23 (показан винтовым) поперечной подачи бурильной машины 24, гидроцилиндр 25 подачи бурильной машины вперед и назад, исполнительный орган 26 бурильной машины. Привод 22 включается
клапаном 8 управления поперечной подачей бурильной машины. Управление гидроцилиндром 25 подачи осуществляется клапанами 9 и 10, первый из которых обеспечивает подачу вращателя вперед, а второй - назад. Переднее положение бурильной машины фиксируется хатчиком 11, а заднее - датчиком 12. Перемещение бурильной машины 24 на ширину исполнительного органа 26 фиксируется датчиком 14, а крайнее поперечное положение бурильной мащины 24 - датчиком 15.
Система управления бурильной установкой работает следующим образом. При включении кнопки «Пуск 1 на дистанционном пульте 13 управления, расположенном на безопасном от выброса расстоянии, сигнал с ее выхода поступает на первый вход ячейки 3 памяти пуска. С выхода ячейки 3 памяти пуска сигнал поступает на пускатель 5 двигателя бурильной мащины 24, а с выхода пускателя - на входы питания ячеек 4 и 16 памяти реверса и последнего цикла бурения соответственно. Система остается включенной и при отпускании кнопки «Пуск 1.
При необходимости прервать работу бурильной установки отключение производится кнопкой «Стоп 2 на пульте 13 дистанционного управления. Сигнал с выхода кнопки поступает через первый элемент ИЛИ 6 на второй вход ячейки 3 памяти пуска.
При этом сигнал с ее выхода исчезает, отключается пускатель 5 двигателя бурильной машины и система обесточивается.
После включения питания сигнал с инверсного выхода ячейки 4 памяти реверса поступает на клапан 9 управления механизмом 25 подачи бурильной машины 24 вперед. Происходит процесс бурения разгружающей щели на ширину исполнительного органа 26. После того, как пробурена щель на длину исполнительного органа, срабатывает датчик 11 переднего положения бурильной машины.
Сигнал с выхода датчика 11 поступает на второй вход ячейки 4 памяти реверса, и она включается. Сигнал на инверсном выходе ячейки 4 памяти реверса исчезает (клапан 9 отключается), а на прямом выходе появляется и поступает на первые входы первого 17 и второго 18 элементов И. На втором входе первого элемента И 17 присутствует сигнал с инверсного выхода датчика 12 заднего положения бурильной мащины. Включается клапан 10 управления
механизмом 25 подачи бурильной машины 24 назад. Бурильная машина 24 возвращается в заднее положение. В заднем положении срабатывает датчик 12 заднего положения бурильной машины. На инверсном выходе датчика 12 сигнал исчезает, отключается
клапан 10, а на прямом выходе появляется и поступает на второй вход второго элемента И 18. С выхода второго элемента И 18 сигнал поступает на клапан 8 управления
механизмом 23 поперечной подачи. Включается привод 22 поперечной подачи бурильной машины.
В процессе поперечного перемещения бурильной машины датчик 14 выключается и замыкается снова после перемещения на ширину исполнительного органа 26. При замыкании датчика 14 сигнал с его выхода через второй элемент ИЛИ 7 поступает на вход ждущего мультивибратора 21, который формирует на первом входе ячейки 4 памяти реверса сигнал длительностью, достаточной для ее отключения. На инверсном выходе ячейки 4 памяти реверса появляется сигнал, включается клапан 9 управления механизмом подачи 25 бурильной машины 24 вперед и отключается клапан 8 управления механизмом 23 поперечной подачи.
Происходит бурение щели на ширину исполнительного органа 26.
Система управления в дальнейшем повторяет описанный цикл работы до тех пор, пока в процессе поперечного перемещения бурильной мащины не сработает датчик 15 крайнего положения механизма поперечной подачи. Сигнал с датчика 15 поступает через второй элемент ИЛИ 7 на вход ждущего мультивибратора 21, который отключает ячейку 4 памяти реверса. Происходит бурение щели. В переднем положении бурильной машины 24 срабатывает датчик 11 переднего положения бурильной машины, который включает ячейку 4 памяти реверса, сигнал с датчика 11 переднего положения бурильной машины поступает также на второй вход третьего элемента И 19, на первый вход которого поступает сигнал с датчика 15 крайнего положения механизма поперечной подачи. На выходе третьего элемента И 19 появляется сигнал, который включает ячейку 16 памяти последнего цикла бурения, с прямого выхода которой сигнал поступает на первый вход четвертого элемента И 20. При возвращении бурильной машины 24 в заднее положение срабатывает датчик 12 заднего положения бурильной машины, сигнал с его выхода поступает на второй вход четвертого элемента И, с выхода которого сигнал поступает через первый элемент ИЛИ 6 на второй вход ячейки 3 памяти пуска. Ячейка отключается, обесточивая тем самым и систему управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического и дистанционного управления бурильным агрегатом | 1982 |
|
SU1055862A1 |
| Система автоматического управлениябуРОВОй МАшиНОй | 1979 |
|
SU829909A1 |
| Система автоматического и дистанционного управления буровым станком | 1980 |
|
SU937713A1 |
| Бурильная машина | 1978 |
|
SU699166A1 |
| Система автоматического и дистанционного управления бурильной установкой | 1975 |
|
SU600296A1 |
| Система управления буровым станком | 1980 |
|
SU929826A1 |
| Устройство для бурения шпуров | 1982 |
|
SU1062386A1 |
| Система автоматического и дистанционного управления бурильным агрегатом | 1984 |
|
SU1190011A2 |
| Устройство для измерения расстояния между растениями и подсчета их количества | 1990 |
|
SU1810744A1 |
| Система управления буровым станком | 1982 |
|
SU1059148A1 |
Сеть
Ч
/4
//
22
Фиг, 2
| Цифро-аналоговая система программногоупРАВлЕНия | 1977 |
|
SU819793A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система автоматического и дистанционного управления бурильной установкой | 1975 |
|
SU600296A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
