(54) ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МАГНИТНОЙ ИНДУКЦИИ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения переменной магнитной индукции | 1979 |
|
SU983603A1 |
| Цифровой измеритель магнитного поля | 1978 |
|
SU842648A1 |
| Цифровой измеритель магнитной индукции | 1978 |
|
SU746358A2 |
| Цифровой измеритель магнитной индукции | 1978 |
|
SU748305A2 |
| Устройство для измерения переменнойМАгНиТНОй иНдуКции | 1979 |
|
SU813337A1 |
| Устройство для измерения переменной магнитной индукции | 1979 |
|
SU885941A2 |
| Способ измерения эдс холла | 1979 |
|
SU828135A1 |
| Цифровой измеритель магнитной индукции | 1989 |
|
SU1732305A1 |
| Цифровой измеритель переменнойМАгНиТНОй иНдуКции | 1979 |
|
SU811161A1 |
| Цифровой измеритель постоянной магнитной индукции | 1989 |
|
SU1704114A1 |
Изобретение относится к области магнитных измерений и может быть использовано для прецизионного измерения в широком диапазоне индукции постоянных магнитных полей.
Известен измеритель магнитной индукции, который состоит из датчика Холла источника переменного тока для питания датчика Холла, дополнительной катушки, в поле которой находится датчик Холла. , источника постоянного тока для питания обмотки дополнительной катушки, преобразователя напряжение-код, реверсивного счетчика, делительного устройства, устройства управления и цифрового отсчетного устройства; в котором преоб;разователь напряжение-код включен между датчиком Холла, реверсивным счетчиком и делительным устройством, второй вход которого подсоединен к выходу реверсивного счетчика, а выход - к цифровому отсчетному устройству, устройство управления соединено с преобразователем напряжение-код, делительным устройством, реверсивным счетчиком, источником постоянного тока и цифровым отсчетным устройством l .
Цикл измерения в .известном устройстве состоит из двух тактов. В первом, такте на датчик Холла одновременно воздействует два постоянных магнитных поля: измеряемое В и дополнительное В(х создаваемое дополнительной катушкой, в поле которой находится датчик Холла. По обмотке дополнительной катушки протекает ток от источника постоянного тока. Выходной сигнал датчика Холла, пропорциональный сумме величин магнитных индукций {B, , поступает на преобразователь напряжение-код, откуда в виде последовательности импульсов выдается на реверсивный счетчик, считающий в прямом направлении. Во втором такте на датчик Холла действует только измеряемое магнитное поле. Выходной сигнал датчика,пропорциональный измеряемой магнитной индукции, поступает на преобразователь напряжение-код, откуда в виде последовательности импульсов выдается на реверсивный счетчик, считающий в обратном направлении.
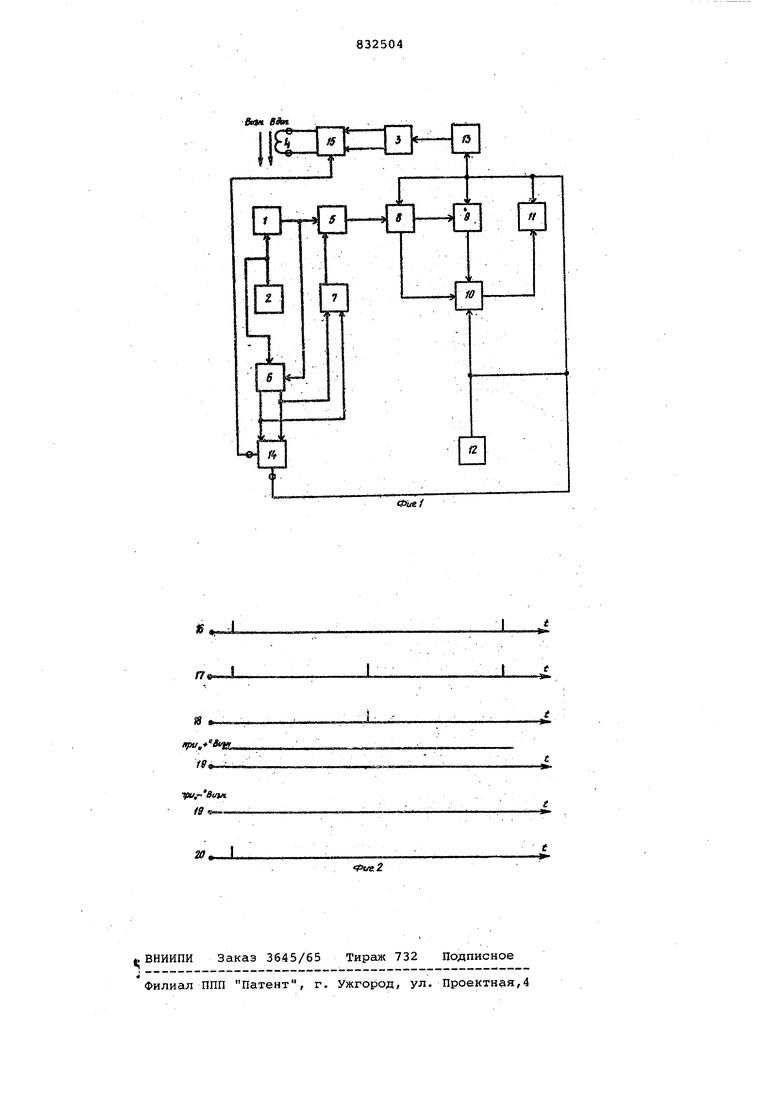
Недостатки устройства - зависимость результатов измерения от направления измеряемого магнитного поля и. недостоверность результатов и.змеретния при несовпадающих по направлению измеряемом и дополнительном маг нитных полях, а также при превышении индукции дополнительного магнит ного поля индукции измеряемого магн ного поля ,змЦель изобретения - повышение точ ,ности измерения. Поставленная цель достигается тем, что в цифровой измеритель магнитной индукции, содержащий последо вательно, сое диненные источник переменного тока, датчик Холла, управля емый делитель/ преобразователь напр жение-код, реверсивный счетчик, дел тельный блок и цифровое отсчетное устройство, последовательно соедине ные переключатель и источник постоя ного тока, дополнительную катушку подключенный к выходу и входу датчи ка Холла фазовый элемент, через три гер прлярности, подключенный ко вто рому входу управляемого делителя, при этом вторые входы преобразователя напряжение-код, реверсивного счетчика, цифрового отсчетного устройства, делительного блока и вход переключателя связаны с блоком управления, а второй выход преобразователя напряжение-код подсоединен к третьему входу делительного блока, дополнительно вводятся блок установ ления синфазности и автоматический переключатель, включенный между дополнительной катушкой и источнико постоянного тока, а блок установления синфазности включен между выходами фазового элемента, выходом блока управления и третьим входом автоматического переключателя. На фиг.1 представлена блок-схема цифрового измерителя магнитной индукции-; на фиг. 2 - временные диаг раммы работы устройства. Цифровой измеритель магнитной .индукции состоит {фиг.1) из датчика Холла 1,источника 2 переменного тока, источника 3 постоянного, тска, дополнительной катуигки 4, управляемого делителя 5, фазового 3Jier.eHTa б, триггера 7 полярности преобразователя напряжение-код 8, реверсивного счетчика 9, делительного блока 10, цифрового отсчетного устройства 11, блока 12 управления переключателя 13, блока 14 установления синфазности и автоматического переключателя 15.. Устройство.работает следующим образом. Фазовый -элемент, б в зависимости от направления измеряемого магнитного поля устанавливает триггер полярности 7 в определенное состояние. Например, при положительном направлении Управляющий сигнал фазового элемента б поступает на ед ничный триггера 7. Триггер 7 полярности выдает его в состояние, соответствующее положительному направлению магнитного поля. При отрицательном направлении магнитного поля управляющий сигнал фазового элемента 6 поступает на нулевой вход триггера 7 полярности. Триггер 7 полярности устанавливает управляемый делитель 5 В состояние соответствующее отрицательному нап- . равлению магнитного поля. Если при отрицательном направлении магнитного поля чувствительность датчика Холла 1 больше, чем при положительном направлении, то коэффициент передачи управляемого делителя 5 при отрицательном направлении меньше единицы при условии, что при положительном направлениион принят: за единицу. При обратном соотношении коэффициент передачи при отрицательном направлении магнитногополя больше единицы. Цикл измерения устройства состо- ит из двух тактов. В первом такте на датчик Холла 1 действует измеряемое магнитное поле Ви7,м В,ыходной сигнап датчика Холла 1 через управляемый делитель 5 поступает на преобразователь напряжение-код 8, откуда в виде последовательности импульсов поступает на реверсивный счетчик 9, который в первом такте работает на вычитание. Реверсивный счетчик 9--фиксирует отрицательный код N,, пропорциональный измеряемой магнитной индукции. Код N выходного регистра преобразователя напряжение-код 8 поступает на один из входов делительного блока 10.. Кроме того, в первом такте измерения блока 14 установления синфазности по состоянию фазового элемента 6 определяет направление измеряемого магнитнохо поля ,. В зависимости от направления этого поля блока 14 установления синфазности устанавливает в одно из двух положений. При положительном направлении ток от источника 3 постоянного тока протекающий по дополнительной катушке 4, имеет одно направление. При отрицательном направТОК от источника 3 измелении В, няет свое направление. Поэтому, поле создаваемое дополнительной катушкой 4, всегда совпадает по направлению с измеряемым постоянным магнитным полем , Во .втором такте на датчик Холла 1 действуют, два постоянных магнитных поля: измеряемое В и дополнительное .., создаваемое дополнительной катушкой 4, в поле которой находится датчик Холла 1. По обмот- ке дополнительной катушки 4 протекает ток от источника 3 постоянного тока,.который включается переключателем 13, на который поступает управляющий сигнал от блока 12 управления. Выходной сигнал датчика Холла 1, пропорциональный сумме величин (Byjj,) , поступает на преобразователь напряжение-код 8, откуда в виде последовательности импульсов поступает на реверсивный- счетчик 9, считающий в прямом направлении. В реэультате после второго такта реверсивный счетчик 9 фиксирует число импульсов Ы,,с1ропорци6нальноедополнительному магнитному полю Вд,, После двух тактов измерения на второй вход делительного блока 10 поступает код Njc реверсивного счетчика 9, После поступления управляющего сигнала с блока 12 управления делительный блок 10 совершает операцию деления числа число N-j,
Mg Очатл
Результат деления, равный N Вдоп не зависит от удельной чувствительности датчика Холла к индукции, его тока питания, коэффициента передачи схемы и направления измеряемого
Если значение
магнитного поля В,
(ЙМГ
индукции дополнительного магнитного поля принять за единицу измеряемой магнитной индукции, то результат деления пропорционален измеряемой магнитной индукции.
Использование блока установки синфазности и автоматического переключателя выгодно отличает предлагаемый цифровой измеритель магнитной индукции от известных устройств, так как позволяет повысить точность и достоверность ргезу71ьтатов измерения. Применение предлагаемого измерителя позволяет полностью автоматизировать процесс измерения и значительно повысить производительности труда при снятии топографии магнитного поля устройств сложной конфигурации, когда в процессе измерения изменяется ,
направление.магнитного поля, действующего на датчик Холла.
Формула изобретения
Цифровой измеритель магнитной, индукции, содержащий последовательно соединенные источник переменного тока, датчик Холла, управляемый делитель, преобразователь напряжениекод, реверсивный счетчик, делительный блок и цифровое отсчетное устройство, последовательно соединенные переключатель и источник постоянного тока, дополнительную катушку, подключенный к выходу и входу датчика Холла фазовый элемент, через триггер полярнэсд-и,подключенный ко второму входу управляемого делите- ,
ля, этом вторые входы преобразователя напряжение-код, реверсивного счетчика, цифрового отсчетного устройства, делительного блока и ,вход. переключателя связаны с блоком управления, а второй выход преобразователя напряжение-код подсоединен к третьему входу делительного блока отличающийс я тем, что, с целью повышения точности измерения, в него дополнительно вводятся блок
установления синфачности и автоматический переключатель,, включенный между дополнительной катушкой и источником постоянного тока, а блок установления синфазности включен между
выхода.ми фазового элемента, выходом блока .управления и третьим входом автоматического переключателя.
Источники информации,
принятые во внимание при экспертизе
1, Авторское свидетельство СССР 347704, кл. G 01 R 33/06, 1972.
Вещ eSsn
еII
U5
«-
trI-. tf U-ft
