(5А) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕННОЙ МАГНИТНОЙ ИНДУКЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения переменнойМАгНиТНОй иНдуКции | 1979 |
|
SU813337A1 |
| Цифровой измеритель переменнойМАгНиТНОй иНдуКции | 1979 |
|
SU811161A1 |
| Устройство для измерения переменной магнитной индукции | 1979 |
|
SU983603A1 |
| Цифровой измеритель магнитной индукции | 1979 |
|
SU832504A1 |
| Устройство для измерения переменной магнитной индукции | 1977 |
|
SU741207A1 |
| Цифровой измеритель переменной магнитной индукции | 1977 |
|
SU783727A2 |
| Цифровой измеритель переменной магнитной индукции | 1982 |
|
SU1075203A1 |
| Цифровой измеритель магнитной индукции | 1978 |
|
SU746358A2 |
| Цифровой измеритель магнитного поля | 1978 |
|
SU842648A1 |
| Цифровой измеритель магнитной индукции | 1978 |
|
SU748305A2 |
Изобретение относится к магнитным измерениям и может быть использовано для прецизионного измерения в широком частотном диапазоне индукции переменных магнитных полей. По основному авт.св. If 811161 известно устройство, которое состоит из датчика Холла, источника переменного тока для питания датчика Холла, катушки, в поле которой находится датчик Холле, стабилизатора постоянного тока для питания обмотки катушки, переключателей, преобразователя напряжение-код, делительного устройства, цифрового отсчетного устройства, устройства управления, изме рителя частоты, формирователя опорно частоты, схемы анализа, формирователей низкочастотной и высокочастотной составляющих, синхронных детекторов, реверсивного счетчика и амплитудного детектора l , Недостатком данного устройства является невысокая точность измерения, когда значения частот измеряемой магнитной индукции (SJ и тока питёг-: ния 51 отличаются друг от друга меньше, чем в 100 раз. В этом- случае выделение огибающей выходного сигнала датчика Холла Dy..CoslW: cosatlj S амплитудным детектором происходит с невысокой точность. Эта точность уменьшается с приближением частоты Шк частоте Й- . Цель изобретения - повышение точности измерения индукции переменных магнитных полей. Поставленная цель достигается тем, что в устройство для измерения переменной магнитной индукции, содержащее датчик Холла, источник переменного тока для питания датчика Холла, катушку, в поле которой находится датчик Холла, стабилизатор постоянного тока для питания обмотки катушки, три переключателя, преобразователь н-апряжение-код, делительное устройство, цифровое отсчетное устройство, устройство управления, измеритель частоты, формирователь опорной частоты, схему анализа, формирователи низкочастотной и высокочастотной составляющих, два синхронных детектора, амплитудный детектор и реверсивный счетчик, вход которого соединен с выходом преобразователя напряжение-код и первым входом делительного устройства, а выход - через делительное устройство с цифровым счетным устройством, выI ход датчика Холласоединен с формирователями низкочастотной и высокочастотной составляющих и измерителем частоты, выход которого через схему анализа соединен с входом устройства управления, формирователь опорной частоты соединен с вторым входом схемы анализа, выход формирователя низкочастотной составляющей через первый синхронный детектор и первый переключатель соединен с первым входом преобразователя напряжение-код, выход формирователя высокочастотной составляющей через второй переключатель и второй синхронный детектор соединен с вторым входом первого переключателя, амплитудный детектор включен между выходом формирователя высокочастотной составляющей и втооым входом второго переключателя, источник переменного тока подключен к датчику Холла, катушка подсоединен к стабилизатору постоянного тока, вход которого подключен к третьему Гереключателю, выход устройства упраления подключен к второму входу реЕерсивного сигнала, второму входу цифрового отсчетного устройства, третьему входу делительного устройства, иторому входу преобразователя напряжение-код, третьим входам первого и второго переключателей и второму входу третьего переключателя, дополнительно введены последовательно соединенные формирователь граничной частоты, измеритель поддиапазона управляющий триггер и частотно-зависимый элемент, выход которого подключен ко входу источника переменного тока, а второй вход измерителя поддиапазона подключен к выходу измерителя частоты.
Повышение точности измерения обусловлено тем, что при приближении частоты Ш измеряемой магнитной индукции Влхк частоте тока питания 5t производится изменение частоты тока питания на 51
. Так как частоты 51 и SLn
разнесены на несколько порядков, то частоты тока питания и измеряемой индукции в процессе измерения также
всегда будут отличаться на несколько порядков.
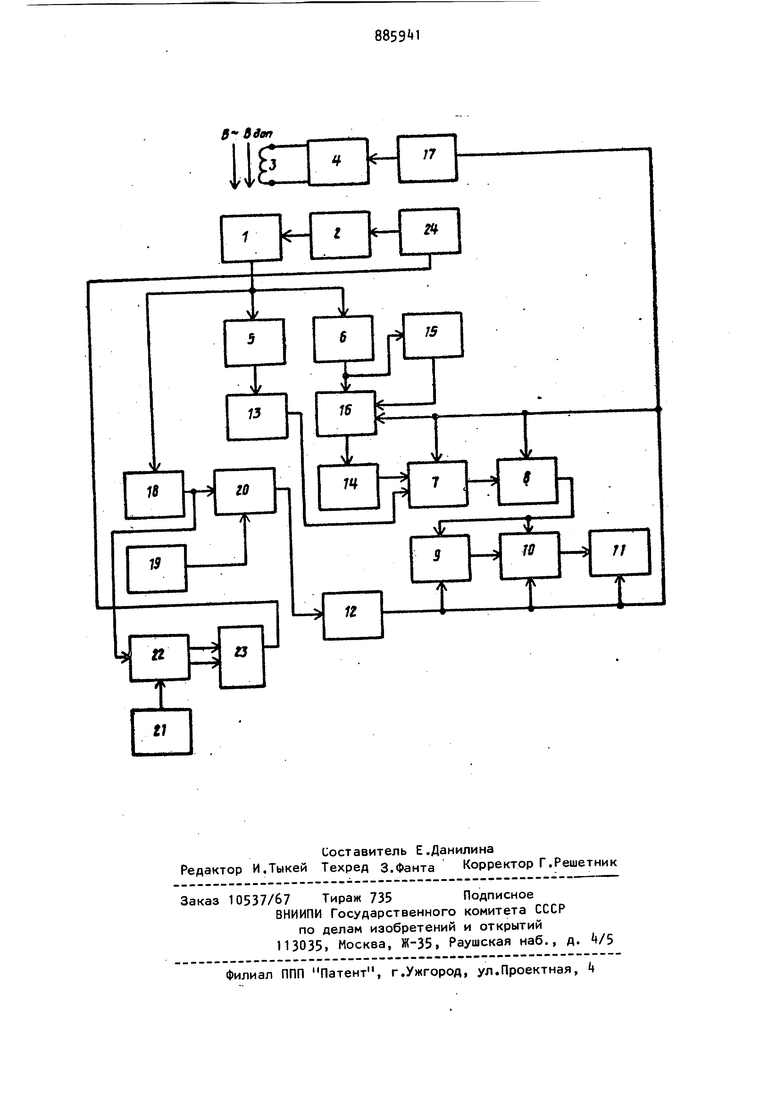
На чертеже представлена блок-схема устройства.
Устройство состоит из датчика Холла 1, источника 2 переменного тока, катушка 3, стабилизатора постоянного тока, формирователя 5 низкочастотной составляющей, формирователя 6 высокочастотной составляющей, переключателя 7 преобразователя 8 нап1ряжение-код, реверсивного счетчика 9 делительного устройства 10, цифрового отсчетного устройства 11, устройства 12 управления,синхронных детекторов 13 и Н, амплитудного детектора 15, переключателей 16 и 17, измерителя частоты 18, формирователя опорной частоты 19, блока 20 анализа, формирователя 21 граничной частоты,
измерителя 22 поддиапазона , управляющего триггера 23 и частотнозависимого элемента 2.
Устройство работает следующим образом.
Выходной сигнал U(B Cosytt4-BiQp,)
VosSlt S датчика Холла 1 поступает на формирователи 5 и 6 и измеритель частоты 18. Дальнейшая работа устройства зависит от частоты измеряемой магнитной индукции Вл/, Если U) У GL , блок 20 анализа устанавливает устройство 12 управления в такое состояние, при котором процесс измерения состоит из двух тактов. Сигналом начальной установки, поступающим из устройства 12 управления на блоки 8, 10, 7 и 16 схема подготавливается к циклу измерения. В первый такт на преобразователь 8 напряжение-код, через переключатель 7 поступает высокочастотная составляющая B Costyt у cosfilt Sln/выходного сигнала датчика Холла 1. Она выделяется формирователем 6 и через переключатель 16 поступает на синхронный детектор , где преобразуется в постоянное напряжение . Код N;«| выходного регистра преобразователя 8 напряжение-код соответствующий измеряемой магнитной индукции переменного магнитного поля В, переписывается в делительное устройство 10
где К - коэффициент преобразования формирователя высокочастот ной составляющей, Кл коэффициент преобразования синхронного детектора, Ко - коэффициент преобразования преобразователя напряжени кодВо второй такт коммутации на пре образователь 8 напряжение-код чер переключатель 7 поступает низкочаст ная составляющая ,S выход ного сигнала датчика Холла 1. Она выделяется формирователем 5 и преоб зуется синхронным детектором 13 в постоянное напряжение. Код N выхо ного регистра преобразователя 8 на ряжение-код, соответствующий индук ции дополнительного магнитного поля Вдоп1 переписывается в делительное устройство 10. Sl BAon 4 eS де К.- коэффициент преобразования формирователя низкочастотной составляющей; К.- коэффициент преобразования синхронного детектора. При поступлении управляющего си1- нала схемы 12 устройство 10 совершает операцию деления числа N на число N. Результат деления при К будет М 4 SK iK2Ko,Iyibyy, Вуу, -ь а5ЧК Ч1у,доп %п Ч Из последнего выражения видно, чт устройство деления 10 зафиксирует в виде статического кода число импульсов, пропорциональное измеряемой индукции магнитного поля В и не зависит от нестабильности тока питания датчика, параметров датчика и коэффициентов преобразования схемы при стабильных коэффициентах преобразования формирователей низкочастотной и высокочастотной составляющих К, Кд. Если значение индукции дополнительного магнитного поля принять за единицу измерения, то результат измерения будет пропорционален измеряемой индукции переменных магнитных полей. Если ш 51-| блок 20 анализа уста навливает устройство 12 управления в такое состояние, при котором процесс измерения состоит из трех тактов. Сигналом, поступающих из устройства 12 управления на блоки 8, i1 10, 7 и 16 схема подготавливается к циклу измерения. В первый такт на преобразователь 8 напряжение-код через переключатель 7 поступает выходной сигнал датчика Холла и SIy,cosat( + + Вдор) . Он выделяется формирователем 6 и черезпереключатель 16 поступает на синхронный детектор 1, где преобразуется в постоянное напряжение. Код N выходного регистра преобразователя 8 напряжение-код, пропорциональный измеряемому и дополнительному магнитным полям (+ + Ajon поступает на реверсивный счетчик 9, считающий в пр-ямом направленииN.f ( В) .. Во второй такт коммутации на датчик 1 Холла действует только измеряемое магнитное поле В со scut, так как устройство 12 управления отключает стабилизатор постоянного тока k. Выходной сигнал датчика Холла 1 через переключатель 7 поступает на преобразователь 8 напряжениекод. Код N выходного регистра преобразователя 8 напряжение-код, соответствующий индукции измеряемого магнитного поля , поступает на реверсивный счетчик 9, считающий в обратном направлении -Н(В + Вдоп) -8„К,К.,К,,К,Кз В третий такт коммутации выходной сигнал датчика 1 Холла B cosWtl S х ifcosSlt, выделенный формирователем 6, поступает на амплитудный детектор 15. Выходной сигнал амплитудного детектора 15, пропорциональный измеряемому магнитному полю B ycosbrt, через переключатель 16 поступает на синхронный детектор 1А. Этот сигнал преобразуется в постоянное напряжение и через переключатель 7 поступает на преобразователь напряжение-код 8. Код Njj. выходного регистра преобразователя 8 напряжение-код равен .4 . где Kg- коэффициент преобразования амплитудного детектора. При поступлении управляющего сигнала устройства 12 на входы делительного устройства 10 поступает код NHC преобразователя 8 напряжение-код и код N 2 с реверсивного 7 9. Результат деления N счетчика равен Nlj Вуу,1у,, Ъ 3 Из последнего выражения видно, что устройство деления 10 зафиксирует в виде статического кода число импульсов, пропорциональное измеряе мой индукции переменного магнитного поля Вуу, и не зависит от нестабильности тока питания датчика и коэффициента преобразования схемы-при стабильном коэффициенте преобразова- , ния Kg амплитудного детектора 15 В зависимости от частоты измеряе мой магнитной индукции В , определяемой измерителем 18, измеритель 22 поддиапазона выдает команд ный сигнал на управляющий триггер 23 Если частота измеряемой индукции Ш , меньше граничной частоты SL формирователя 21 , измеритель 22 поддиапазона устанавливает триггер 23 в нуле вое состояние. При этом частота источника питания датчика Холла будет Si-fjS 7 filpp . При увеличении час тотыизмеряемой индукции в момент когда U) станет больше SLre, измеритель 22 поддиапазона выдает управляющий сигнал на единичный вход триггера 23. Последний подключает к источнику 2 переменного тока частотно; зависимый элемент 2, При этом измеряется частота источника 2 питания. Частота источника ,Таким образом, независимо от частоты измеряемой ин |укции Ш , частота источника питания датчика Холла всегда буде на несколько порядков отличаться от частоты измеряемой индукции со, т.е. глубина модуляции всегда будет достаточной для выделения полезного сиг нала с высокой точностью. 18 Использование новых элементов формирователя граничной частоты, измерителя поддиапазона и частотнозависимого элемента выгодно отличает предлагаемое устройство для измерения переменной магнитной индукции от известного,так как позволяет полностью исключить мультипликативную погрешность, обусловленную нестабильностью параметров датчика Холла, тока питания и электрических параметров схемы во всем частотном диапазоне измеряемой магнитной индукции , где (Ig- верхняя граничная частота диапазона измеряемой магнитной индукции. В этом случае отпадает необходимость в изготовлении высокостабильных источников питания датчика Холла и термостабилизации датчиков Холла. Это приводит к уменьшению габаритов измерительного зонда, что позволяет проводить измерение переменных магнитных полей в узких зазорах. Формула изобретения Устройство для измерения переменной магнитной индукции по авт. св. If 811161, о т л и ча ю щ е е с я тем, что, с целью повышения точности измерения, в него дополнительно введены последовательно соединенные формирователь граничной частоты, измеритель поддиапазона, .управляющий тригt ep и частотнозависимый элемент, выход которого подключен ко входу источника переменного тока, а второй вход измерителя поддиапазона подклю; чен к выходу измерителя частоты. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР W 811161, кл. G 01 R 33/06, 1979,
