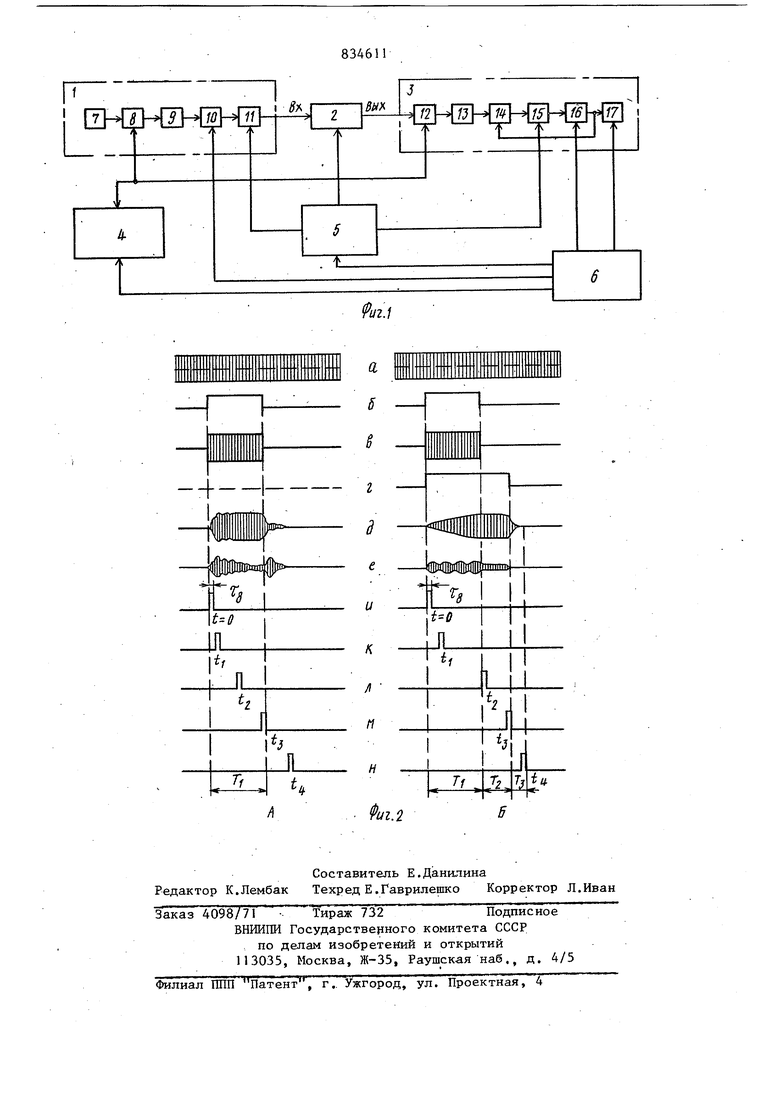
Изобретение относится к радиоэлектронике и электросвязи, в частности к устройствам автоматического измерения параметров (уровней, затуханий) частотных и временных харак теристик пассивных и активных частот но-избирательных устройств и фильтров и может быть использовано в радиоизмерительной технике и при произ водственном контроле этих устройств в динамическом (импульсном) режиме работы на промежуточных частотах. Известен автомат с программным уп равлением, содержащий управляемый по частоте генератор синусоидальных колебаний, формирователь уровня синусоидального сигнала, измеритель уро ня сигнала и устройство прогр 1ммного управления. В свою очередь формирователь сигнала содержит последовательно соединенные стабильный генератор опорной частоты, смеситель с фиЛьтром нижних частот и управляемый аттенюатор, а измеритель сигнала последовательно соединенные смеситель с полосовым фильтром, настроенным на опорную част.оту, управляемьй цифровой аттенюатор, схему цифровой АРУ, из последовательно соединенных детектора-компаратора АРУ и реверсивного цифрового счетчика, управляющего цифровым аттенюатором, а также цифровой вычислитель в виде реверсивного счетчика разности.с цифровым индикатором (табло). Объект измерений (например фильтр) включен между выходом формирователя сигнала и входом измерителя уровня сигнала. Это устройство по заданной программе автоматически измеряет относительные уровни выходного сигнала объекта в непрерьганом режиме при расстройках частоты входного сигнала относительно номинальной частот : объекта, т. е. статические параметрыамплитуды частотрой характеристики объекта, рJ. Однако устройство имеет недостаточные функциональные возможности. 3 Известно устройство аналогичного назначения, содержащее усилнтель с электронным цифровым аттенюатором и схему цифровой АРУ, состоящую из пикового детектора, компаратора и реверсивного счетчика, управляющего ци ровым аттенюатором. Оно позволяет производить точное измерение или установку уровня непрерывного ВЧ-ПЧ сигнала с помощью ЦВМ или может быть использовано для широкополосного высокочастотного вольтметра с цифровым индикатором 2 , Недостатком этого устройства явля ется то, что оно не позволяет измерять параметры переходных процессов и другие динамические параметры частотно-временных- характеристик объектов, т. е. радиоимпульсные параметры устройства частотной селекции. Цель изобретения - обеспечение автоматического измерения динамических параметров частотно-временных характеристик объектов измерений. Поставленная цель достигается тем. Что в автоматический измеритель содержащий управляемый по частоте ге нератор синусоидальных колебаний, к выходу которого подключены формирователь сигнала и измеритель уровне сигнала, а ко входу - блок программного управления, введены два времен ных селектора и управляемь1й синхроге .нератор селектирующих и стробирзтащих импульсов, причем первый селектор включен между выходом управляемого аттенюатора, формирователя сигнала . и входом объекта измерений, а второй между выходом управляемого цифрового аттенюатора и входом блока ц фрового автоматического регулирования усиления измерителя уровней сигнала выходы управляемого синхрогенератора соединены с управляющими входами временных селекторов и объекта измерений, а вход - с выходом блока программного управления. На фиг, 1 приведена функциональная схема предлагаемого устройства; на фиг. 2 .- временные диаграммы его работы. Устройство содержит (фиг. I) формирователь 1 сигнала, объект 2 измерений, измеритель 3 уровнейсигнала управляемый по частоте генератор 4 (синтезатор частоты), управляемый сиикрогенератор 5 селектирующих и стробирующих импульсов, блок 6 прй14граммного управления, стабильный генератор 7 опорной частоты, смеситель 8, фильтр 9 нижних частот, управляемый цифровой аттенюатор 10, временной селектор 11, см,еситель 12, полосовой Фильтр 13, управляемый цифровой аттенюатор 14, временной селектор 15, блок 16 цифрового автоматического регулирования усиления (АРУ), цифровой вычислитель 17 с индикатором. Формирователь 1 сигнала содержит последовательно соединенные стабильный генератор 7 опорной частоты, смеситель 8 с фильтром 9 нижных частот, управляемый цифровой аттенюатор 10 и временной селектор 11. Измеритель 3 уровней сигнала содержит последовательно соединенные смеситель 12 с полосовым фильтром 13, управляемый цифровой аттенюатор 14, временной селектор 15, блок 16 цифрового АРУ, управляющий аттенюатором 14, и цифровой вычислитель 17 с индикатором. Устройство содержит также управляемый по частоте генератор 4 синусоидальных колебаний, соединенный с гетеродинными входами смесителей 8 и 12, управляемый синхрогенератор 5 селектирующих и стробирующих импульсов и блок 6 программного управления, при этом выходы синхрогенератора 5 соединены с управляющими входами временных селекторов 11 и 15 и объекта 2 измерений, а выходы блока 6 программного управления - с управляющими входами генератора 4, аттенюатора 10, синхрогенератора 5, блока 16 цифрового АРУ и цифрового вычислителя 17. Объект 2 измерений (полосовой фильтр, резонансный усилитель или другая частотно-избирательная схема) включен так, что его вход подключен к выходу временного селектора 11 формирователя, а выход - к . сигнальному входу смесителя 12 измерителя 3. Устройство работает следующим образом. На вход объекта 2 подается прямоугольный радиоимпульс (фиг. 2 в) заданного уровня и заданной длительности Х« f который формируется из гармонических колебаний генератора 7 опорной частоты (фиг. 2 а), преобразованных в смесителе 8 и выделенных в фильтре 9 на номинальную частоту объекту 2 (или частоту, отстроенную от номинальной на заданную величину). Если объектом 2 является кинематичес кий фильтр (интегратор ПЧ), то на него помимо этого подается селекти рующий импульс работы интегратора заданной длительности Т + Т,- (фиг.2г где Т - время накопления; Тд - время памяти интегратора. Уровень входного сигнала устанавливается с помощью аттенюатора 10 формирователя 1, частота заполнения - с помощью управляемого по частоте генератора 4, а форма, длительность и частота повторения селектирующих импульсов - с помощью синхрогенератора 5 по командам от блока 6 программного управления. В результате воздействия на объект 2 описанного радиоимпульсного сигнала на его выходе образуется так же радиоимпульсный сигнал сложной формы, обусловленный переходными про цессами. На фиг. 2 А, д, е, показаны осциллограммы сигнала на выходе обычно го, полосового кварцевого фильтра, на фиг. 2 ;Б, д, е - на выходе кинема- тияеского кварцевого фильтра, причем случай д соответствует входному сигналу с частотой заполнения, равной номинальной частоте фильтра, а случай а - входному сигналу с частотой заполнения, отстроенной от номинальной на заданную величину. При измерении параметров переходных процессов или динамических параметров частотно-временных характерис тик объекта в различных временнь1х и частотных сечениях берутся два выборочных значения амплитуд в разных временных сечениях одной и той же осциллограммы выходного сигнала объекта 2 (при одной и той же частоте заполнения входного сигнала), либо в одном и том же временном сечении разных осциллограмм выходного сигнала (при разных частотах заполнения входного сигнала), либо в разных временных сечениях разных осциллогра выходного сигнала и вычисляется их отношение в децибеллах. Для этого вы ходной радиоимпульсньй сигнал объекта 2, поступающий на вход измерителя 3, после обратного преобразования на исходную опорную частоту, в смесителе 12, усиления полосовым фильтром 13 и прохождения черезцифровой аттенюатор 14 стробируется во временном селекторе 15 коротким импульсом выборки TI , имеющим заданную задерж ку t относительно начала входного радиоимпульса (фиг. 2 и, к, л, м, н), Длительность, частота повторения и задержка стробирующего импульса выборки формируется в синхрогенераторе 5, причем задержка t меняется по -командам от блока 6 программного управления. Частота повторения стробирующих импульсов совпадает с частотой повторения селектирующих импульсов, В результ ате стробирования образуются короткие радиоимпульсы выборки, имеющие амплитуду выходного сигнала объекта 2 в заданном временном сечении и при заданной расстройке входного сигнала. Они поступают на блок 16 цифрового АРУ, где детектируются, сравниваются с порогом и воздействуют, на цифровой счетчик АРУ. Перед началом измерений аттенюатор 14 обнуляется (затухание О дБ), что обеспечивает максимальную чувствительность измерителя 3. Затем подается описанный входной сигнал и первый стробирующий импуЛьс выборки, схема АРУ начинает работать и доводит уровень радиоимпульса выборки до значения порога АРУ, при этом-в аттенюатор 14 автоматически вводится затухание . Этот процесс занимает столько периодов повторения импульсов входного сигнала и импульсов выборки, сколько необходимо для достижения счетчиком АРУ числа А , затем изменяются параметры входного сигнала и стробирующего импульса Выборки (частота заполнения входного . сигнала или время задержки импульса выборки, или то и другое одновременно) и повторяется цикл отработки схемы АРУ. В аттенюатор 14 автоматически вводится новое затухание А,дБ, Во время этого цикла импульсы счета с выхода компаратора АРУ поступают также на реверсивный счетчик разности цифрового вычислителя 17. Он отсчитывает только число импульсов, равное разности Б Б, которая фиксируется на цифровом табло для визуального контроля. Эта разность определяет значение искомого параметра как отношение двух выборочных уровней выходного радиоимпульсного сигнала объекта измерений. При определении параметров затуания переходных процессов в полосоом фильтре в указанной последовательости определяется отиошеиие Б дБ 7 выборочных уровней выходного сигнала в максимуме переходного процесса (фиг. 2 А, е), задержка стробирующего импульса t (фиг. 2 А, к) ив заданном сечении, например t, t ч или t. (фиг. 2 А, л, м, н). В кинематическом фильтре обычно определяется затухание за время памяти и сброса Т (фиг. 2В, д), при этом путем аналогичных операций вычислиется отношение выборочных уровней выходного сигнала соответственно в начале и в конце времени памяти (задержка стробирующего импульса t/j и t , (фиг. 2 б, л, м).или в конце времени памяти и временисброса (задержка стробирующего импульса t и t, ,(фиг. 2 Б, м, н). При определении динамических параметров частотно-временных характеристик тем же п тем определяется отношение выборочны уровней выходных сигналов, соответствующих входному сигналу с частото заполнения, равной номинальной част те объекта (фиг. 2, д), и входному сигналу с частотой заполнения, расстроенной относительно номинальной на заданное значение (фиг. 2, е), при этом для полосового фильтра выборки берутся, например в сечении t (фиг. 2 А, м), а для кинематическог фильтра - в сечении t (фиг. 2 Б, Аналогичным путем может быть опреде лено отношение выборочных уровней при любых-других сочетаниях двух вы борок разных осциллограмм выходного сигнала объекта. Последовательность операций при работе устройства, значения парамет ров входного сигнала, селектирующих и стробирующих импульсов устанавливаются с помощью команд от блока 6 программного управления. Эти данные или заложены в постоянном запоминающем устройстве для ограниченного набора объектов измерений, или ввод ся извне с помощью перфокарт, перфолент или других носителей информа ции. Там же могут быть заложены данные до допустимых значениях все измеряемых устройством параметрах объекта и тем самым осуществлен допусковой контроль этих параметров автоматически с отбраковкой негодны объейтов и фиксацией результатов из мерений не только на цифровом табло но и на бумаге с.помощью внешнего цифропечатающего устройства. 8 Использование предлагаемого устройства обеспечивает автоматизацию измерений и контроля ВЧ-ПЧ радиоэле-ктронной аппаратуры по динамическим параметрам частотно-временных и пе- . реходных характеристик. Применение устройства в контрольно-измерительной технике как при лабораторных исследованиях, так и при производственном контроле позволяет автоматизировать трудоемкий процесс измерений и допускового контроля различных динамических параметров частотноизбирательных и других объектов аппаратуры, что приводит к повьш1ению объективности, качества и надежности результатов измерений или контроля, а также существенно сокращает время измерений и повышает производительность труда. Формула изобретения Автоматический измеритель радиоимпульсных параметров устройств частотной селекции, содержащий управляемый по частоте генератор синусоидальных колебаний, к выходу которого подключены формирователь сигнала и измеритель уровней сигнала, а ко входу - блок программного управления, отличающийся тем, что, с целью обеспечения автоматического измерения динамических параметров частотно-временных характеристик объектов измерений, в него введены два временных селектора и управляемый синхрогенератор селектирующих и стробирующих импульсов, причем первый селектор включен между выходом управляемого аттенюатора, формирователя сигнала и входом объекта измерений, а второй - между выходом управляемого цифрового аттенюатора и входом блока цифрового автоматического регулирования усиления измерителя уровней сигнала, выходы управляемого синхрогенератора соединены с управляющими входами временных селекторов и объекта измерений., а вход - с выходом блокэ программного управления. Источники информации, принятые во внимание при экспертизь 1. Freguenz, 1-969, № 2, с. 3441. 2. Электроника, 1971, № 18, с. 34-39.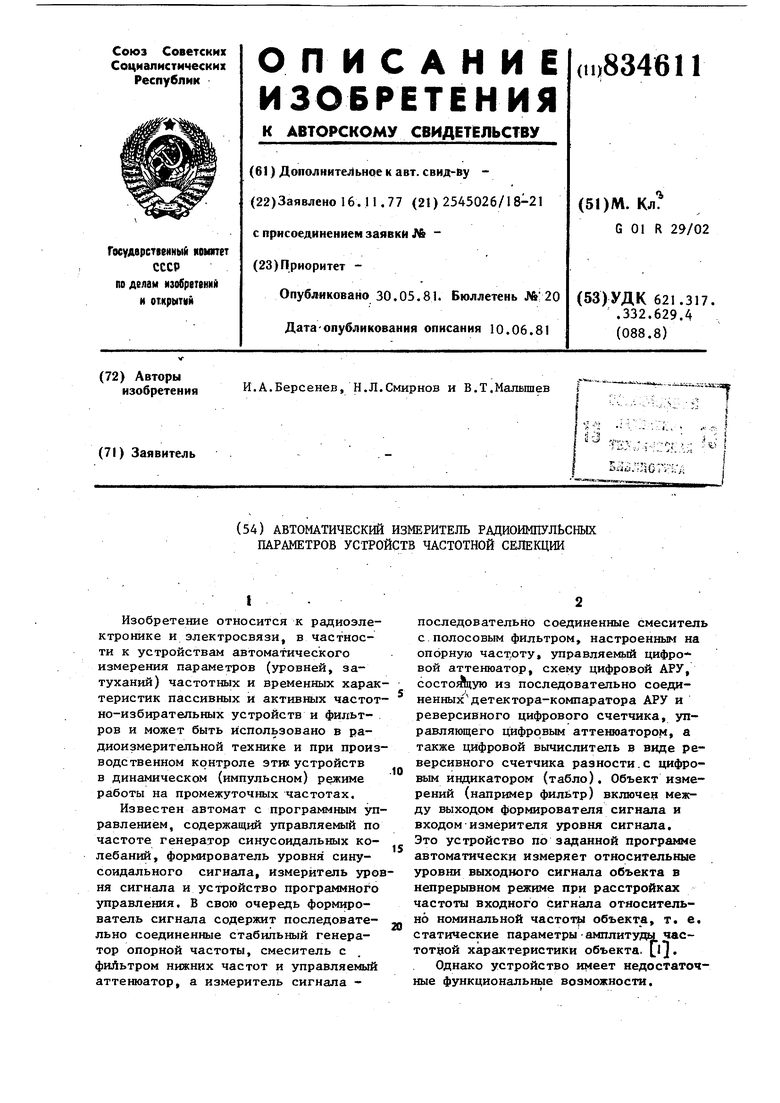

| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой доплеровский измеритель скорости кровотока | 1989 |
|
SU1734697A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФАЗЫ РАДИОСИГНАЛА | 1992 |
|
RU2050552C1 |
| Устройство для контроля и измерения параметров микросборок | 1987 |
|
SU1422194A1 |
| ИЗМЕРИТЕЛЬ ОТНОСИТЕЛЬНЫХ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2584730C1 |
| Измеритель группового времени запаздывания | 1988 |
|
SU1555697A1 |
| Фазометр | 1984 |
|
SU1228040A2 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК | 1992 |
|
RU2054684C1 |
| Фазозапоминающее устройство | 1975 |
|
SU545933A1 |
| Устройство для измерения параметров пространственно разнесенных объектов | 1983 |
|
SU1211665A1 |
| СИСТЕМА ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2256937C1 |