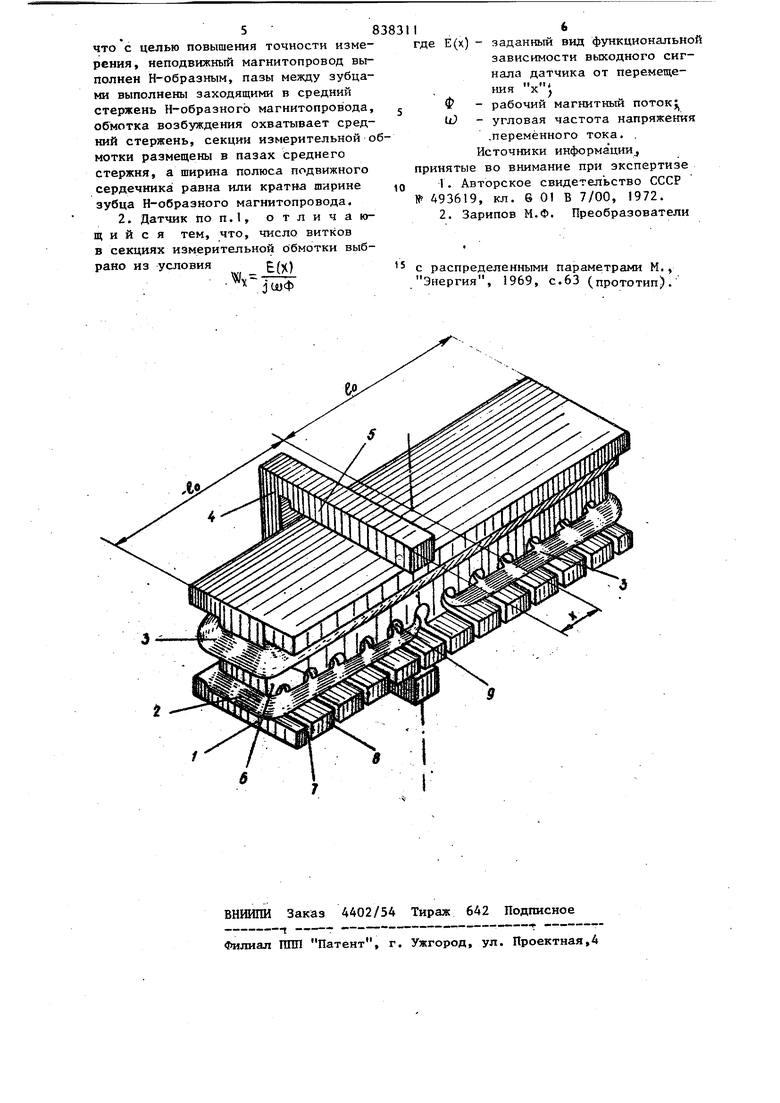
Изобретение относится к измеритель ной технике, в частности к устройства предназначенным для измерения линейны перемещений, Известны трансформаторный датчик линейных перемещений, содержащий Побразный магнитопровод, на одной из параллельных сторон которого размещен соЬредоточенная первичная обмотка, а на другой - в поперечных пазах равномерно размещена трехфазная вторичная обмотка, и якорь. При перемещении якоря вдоль магнитопровода выходное напряжение изменяется по синусоидальному закону рЗ Недостатком данного датчика является низкая точность измерения из-за непостоянства величины воздушного зазора при перемещении якоря вдоль магнитопровода. Наиболее близким по технической сущности к изобретению является датчик линейных перемещений, содержащий подвижный двухполюсный сердечник, свя зываемый с контролируемым объектом в процессе измерения, неподвижный магнитопровод, на котором расположена обмотка возбуждения и на одной из рабочих поверхностей которого, обращенной к одному из полюсов подвижного сердечника, выполнены зубцы, и секционированную измерительную обмотку, секции которой охватывают зубгцл С 23 Недостатками данного датчика явля- ются низкая точность измерения, обусловленная неравномерностью воздушного зазора между полюсами сердечника и стержнями магнитопровода с размещенными на них обмотками, и возможность получения выходного сигнала только в виде .периодической пилообразной кривой. Цель изобретения - повьппение точности измерения. Поставленная цель достигается за счет того, что неподвижный магнитопровод выполнен Н-образным, пазы между зубцами выполнены заходящими в 3 средгаш стержень Н-образного магнито провода, обмотка возбуждения охватывает средний стержень, секции измерительной обмотки размещены в пазах среднего стержня, а ширина полюса подвижного сердечника равна или крат на ширине зубца Н-образного магнитопровода. Кроме того число витков в секциях измерительной обмотки выбрано из условия , Ш., где Е(х)- заданге1|й вид функционально зависимости выходного сигнала датчика от перемещени -рабочий магнитный поток-, -угловая частота напряжения пе ременного тока. На чертеже представлен датчик линейных перемещений , общий вид. Датчик содержит неподвижный магнитопровод 1, имеющий Н-образное сечение, обмотку 2 возбуждения, секционир-ованную измерительную обмотку 3 и под вижный двухполюсный сердечник 4, полюса 5 которого, скользят без зазора по рабочим поверхностям неподвижного магнитопровода 1, охватывая его. На одной из рабочих поверхностей неподвижного магнитопровода 1 выполнены заходящие в его средний стержень 6 прорези 7, образующие йа этой поверх ности зубцы 8, а в среднем, стержне 6 пазы 9. Ширина полюса 5 подвижного двухполюсного сердечника 4 должна быть равна или кратна ширине зубца 8 Н-об разного неподвижного магнитопровода Секции измерительной обмотки 3 ра мещены в пазах 9 среднего стержня 6, причем число витков в секциях изменяется в зависимости от заданного ви да функциональной зависимости выходного сигнала датчика от перемещения. В данном случае при линейной зави симости выходной ЭДС от перемещения подви сного двухполюсного сердечника 4 число витков в секциях определяетс по формуле w-| -t-; где Е - максимальное значение ЭДС измерительной обмотки 3 опреX - величина перемещения, деляющая текущую координату 11 местоположения подвижного сердечника 4; tf, - диапазон линейных перемещений () Для получения характеристики симметричной относительно нуля; (с измерением фазы) измерительная обмотка 3 должна быть выполнена состоящей из двух половин. Датчик работает следунмцрм образом. Пульсирующий магнитный поток, создаваемый обмоткой 2 возбуждения замы- кается по неподвижному Н-образному магнитопроводу 1 и подвижному двухПОЛЮ1СНОМУ сердечнику 4, проходя через воздушные зазоры, образуемые рабочими поверхностями неподвижного магнитопросода 1 и полюсами 5 подвижного двухполюсного сердечника 4. При перемещении подвижного двухполюсного сердечника 4 происходит измерение величины потокосцепления обмотки 2 возбуждения с половинами секционированной измерительной обмотки 3, а, следовательно, и индуктируемой в них ЭДС. В данном случае при линейном распределении витков в секциях секционированной измерительной обмотки 3 индук- тируемая ЭДС равна B ;JUJ$W(X). Так как измерительная обмотка может быть выполнена распределенной по пазам 9 с учетом заданного вида функциональной зависимости изменения выходного сигнала от перемещения, а подвижный двухполюсной сердечник 4, охватывающий полюсами неподвижный магнитопроводг 1, перемещается вдоль рабочих поверхностей без зазора, датчик позволяет повысить точность реализации различных функциональных зависимостей выходного сигнала от перемещения. Формула изобретения . Датчик линейных перемещений, содержапщй подвижный двухполюсный сердечник, связываемый с. контролируемым объектом в процессе измерения, неподвижный магнитоп)овод, на котором расположена обмотка возбуждения и на одной из рабочих поверхностей которого, обращенной к одному из полюсов подвижного сердечника, вьтолнены зубцы, и секционированную измерительную обмотку, секции которой oxBaiusaraT зубцы, отличающийся тем, 583831 что с целью повышения точности измерения, неподвижный магнитопровод выполнен Н-образным, пазы между зубцами выполнены заходящими в средний стержень Н-образного магнитопровода, обмотка возбуждения охватывает средний стержень, секции измерительной обмотки размещены в пазах среднего стержня, а ширина полюса подвижного сердечника равна или кратна ширине о зубца Н-образного магнитопровода. 2. Датчик ПОП.1, отличающийся тем, что, число витков в секциях измерительной Ьбмотки выбрано из условия g(j15 .I где при № 4 с р Эн Е(х) - заданный вид функциональной зависимости выходного сигнала датчика от перемещеьшя х рабочий магнитный поток; угловая частота напряжения .переменного тока, . Источники инфopмaцииJ нятые во внимание при зкспертизе 1.Авторское свидетельство СССР 93619, кл. 6 01 В 7/00, 1972. 2.Зарипов М.Ф. Преобразователи аспределенными параметрами М., ергия, 1969, с.63 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик линейных перемещений | 1980 |
|
SU968587A2 |
| Датчик параметров движения | 1990 |
|
SU1781621A1 |
| Бесконтактный датчик линейных перемещений | 1978 |
|
SU991139A1 |
| Датчик линейных перемещений | 1979 |
|
SU855379A1 |
| Бесконтактный преобразователь линейного перемещения в электрический сигнал | 1978 |
|
SU781576A1 |
| Устройство для дистанционного определения положения объекта | 1983 |
|
SU1211596A1 |
| Устройство для контроля обмоток электрических машин | 1982 |
|
SU1114989A1 |
| Трансформаторный датчик линейных перемещений | 1981 |
|
SU994908A1 |
| Поплавковый индуктивный уровнемер | 1980 |
|
SU916995A1 |
| Бесконтактный прямолинейный сельсин-датчик | 1985 |
|
SU1265462A1 |
