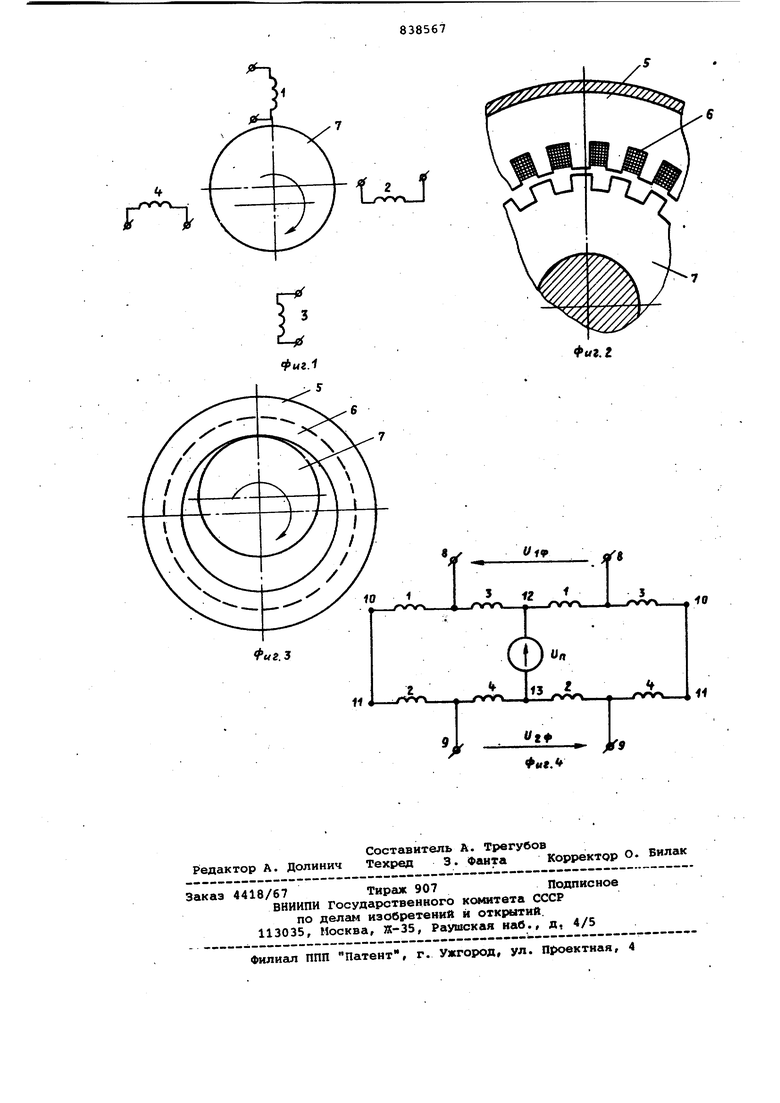
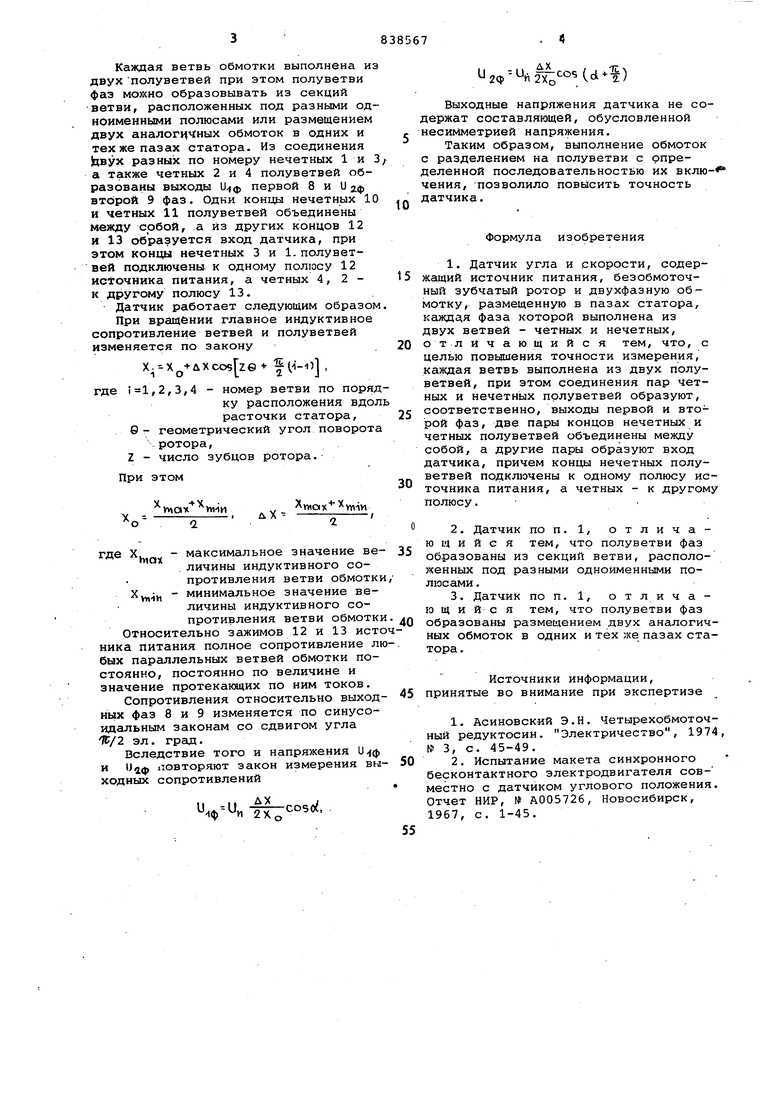
. Изобретение относится к устройствам для измерения угла и угловых ско ростей путем определения амплитуды или частоты генерируемого напряжения и может быть использовано в системе автоматического управления электроприводами. Известны индукторные датчики угла и скорости, представляющие собой индукторные электрические машины 1. Известен также индукторный датчик угла и скорости, содержащий безобмоточный ротор, обмотку, размещенную в пазах статора, в котором они для упрощения выполняются совмещённы- « ми 2. Недостатком известного датчика уг ла и скорости является необходимость иметь источник питания со- средней точкой, что за счет несимметрии приводит к появлению несимметрии напряж ний фаз и значительному по величине нулевому сигналу, т.е. к снижению то ности датчика. Цель изобретения - повышение точности измерения. Указанная цель достигается тем, что в известном датчике содержащем источник питании, безобмоточный зубчатый ротор и двухфазную обмотку. размещенную в пазах статора, каждая фаза которой выполнена из двух ветвей - четных и нечетных, каждая ветвь выполнена из двух полуветвей, при этом соединения пар четных и нечетных полуветвей образуют, соответственно, выходы первой и второй фаз, две пары концов нечетных и четных полуветвей объединены между собой, а другие пары образуют вход датчика, причем концы нечетных ветвей подключены к одному полюсу источника питания, а четных - к другому полюсу. Кроме тогЬ, полуветви фаз могут быть образованы из секций ветви, расположенных под разными полюсами, а также полуветви фаз могут быть образованы размещением двух аналогичных обмоток в одних и тех же пазах статора. На фиг. 1 приведена принципиальная схема датчика; на фиг. 2 и 3 конструктивные исполнения зубцовопазовой зоны; на фиг. 4 --электрическая схема включения обмотки датчика . Ветви 1-4 по порядку расположения вдоль расточки статора 5 уложены в пазы 6 статора 5 (фиг. 2 и 3. Ротор 7 выполняется зубчатым безобмоточным. Каждая ветвь обмотки выполнена из двух полуветвей при этом полуветви фаз можно образовывать из секций ветви, расположенных под разными одноименными полюсами или размещением двух аналогичных обмоток в одних и тех же пазах статора. Из соединения Ьвух разных по номеру нечетных 1 и а также четных 2 и 4 полуветвей образованы выходы первой 8 и U ф второй 9 фаз. Одни концы нечетных10 и четных 11 полуветвей объединены между собой, а из других концов 12 и 13 образуется вход датчика, при этом концы нечетных 3 и 1.полуветвей подключены к одному полюсу 12 источника питания, а четных 4,2к другому полюсу 13. Датчик работает следующим образом При вращении главное индуктивное сопротивление ветвей и полуветвей изменяется по закону X -X +uXcosFze ii-tl , где (1,2,3,4 - номер ветви по поряд ку расположения вдол расточки статора, в- геометрический угол поворот ротора, Z - число зубцов ротора. При этом V П1ах уу11У1 «ли где X. - максимальное значение ве . личины индуктивного сопротивления ветви обмотк Ynw минимальное значение величины индуктивного сопротивления ветви обмотк Относительно зажимов 12 и 13 ист ника питания полное сопротивление л бых параллельных ветвей обмотки постоянно, постоянно по величине и значение протекающих по ним токов. Сопротивления относительно выход ных фаз 8 и 9 изменяется по синусоидальным законам со сдвигом угла /2 эл. град. Вследствие того и напряжения и 11овторяют закон измерения вы ходных сопротивлений %-и„ U2cp-Uh|t °4ci l) Выходные напряжения датчика не содержат составляющей, обусловленной несимметрией напряжения. Таким образом, выполнение обмоток с разделением на полуветви с определенной последовательностью их включения, позволило повысить точность датчика. Формула изобретения 1.Датчик угла и скорости, содержащий источник питания, безобмоточный зубчатый ротор и двухфазную обмотку, размещенную в пазах статора, каждая фаза которой выполнена из двух ветвей - четных и нечетных, отличающийся тем, что, с целью повышения точности измерения, каждая ветвь выполнена из двух полуветвей, при этом соединения пар четных и нечетных прлуветвей образуют, соответственно, выходы первой и второй фаз, две пары концов нечетных и четных полуветвей объединены между собой, а другие пары образуют вход датчика, причем концы нечетных полуветвей подключены к одному полюсу источника питания, а четных - к другому полюсу. 2.Датчик по п. 1, отличающийся тем, что полуветви фаз образованы из секций ветви, расположенных под разными одноименными полюсами . 3.Датчик по п. 1, отличающийся тем, что полуветви фаз образованы размещением двух аналогичных обмоток в одних и тех же пазах статора . Источники информации, принятые во внимание при экспертизе 1.АСИНОВСКИЙ Э.Н. Четырехобмоточный редуктосин. Электричество, 1974, № 3, с. 45-49. 2.Испытание макета синхронного бесконтактного электродвигателя совместно с датчиком углового положения. Отчет НИР, № А005726, Новосибирск, 1967, с. 1-45.
m
PuZ.l
Фиг.1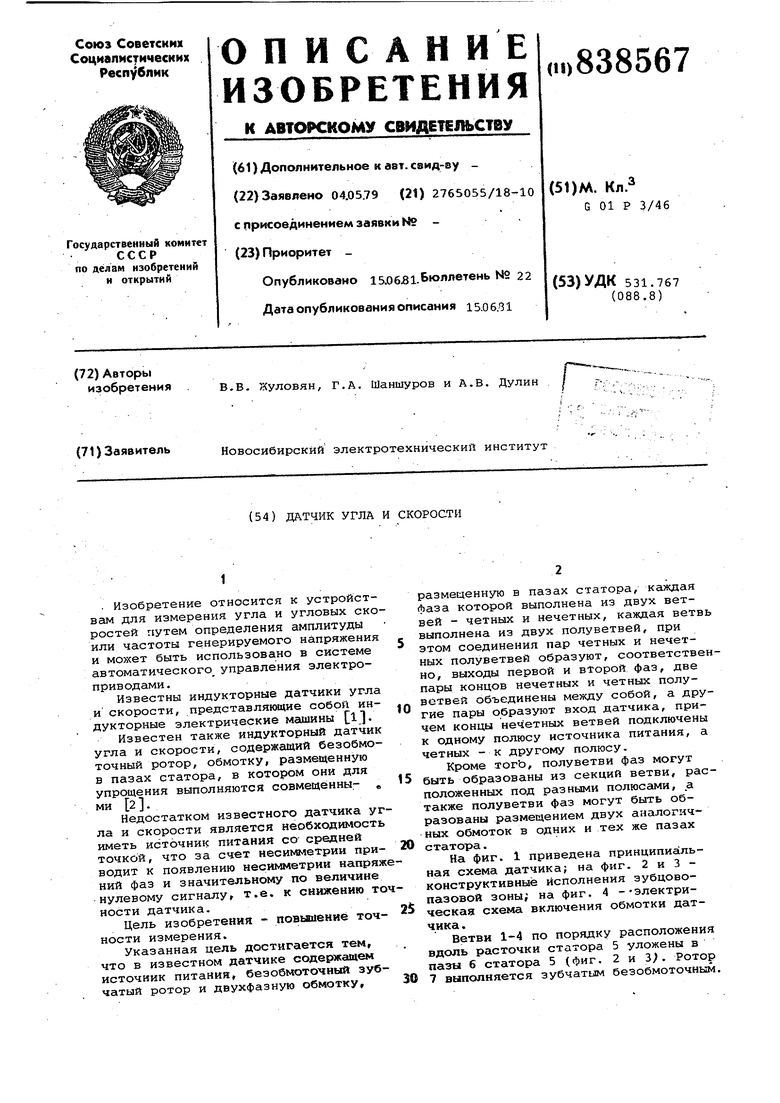
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1993 |
|
RU2072612C1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2401499C1 |
| ДВУХФАЗНЫЙ НЕРЕВЕРСИВНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2266604C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОПЕРЕЧНЫМ МАГНИТНЫМ ПОТОКОМ (ВАРИАНТЫ) | 2018 |
|
RU2690666C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416859C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2407134C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2084070C1 |