Изобретение относится к горной промышленности и предназначено для контролирования разработки подводных выемок землесосным снарядом. Откосам подводных выемок часто задаются сложные формы с промежуточ ными бермами, с изменяемым .заложени криволинейного очертания, что еще больше затрудняет их выполнение, ча то делая практически неосуществимым Распространен прием приближения к заданному откосу, состоящий в том что в приводной части откоса .делает перебор в расчете на то, что в этот перебор сползет верхняя часть откос в которой оставлен равновеликий недо бор. Такой прием дает удовлетворите ные результаты только в однородных сыпучих грунтах и при простейшем очертании откоса. Известны устройства, обеспечивающие по заданной программе перемещение грунтозаборного устройства только в горизонтальной или только в вертикальной плоскости, содержащие датчик, реагирующий на отклонение рабочего органа земснаряда в вертикальной или-в горизонтальной плоскости 1 .. I Однако эти устройства не решают поставленной задачи, а попытки автоматизировать согласование перемещения грунтозаборного устройства в вертикальной и горизонтальной плоскостях вследствие своей сложности не находят практического применения. Известно также устройство, позволяющее контролировать положение грунтозаборного устройства земснаряда при разработке подводных выемок, содержащее датчик с регистрирующим органом и плоской поворотной шкалой, грунтозаборный орган и папильонс1жные сваи. Данное устройство позволяет ручным управлением осуществлять согласование перемещений грунтозаборного органа в вертикальной и горизонтальной плоскостях 2 . Однако согласование перемещений осуществляется только при простейших очертаниях откоса или дна выемки. Цель изобретения - повышение точности разработки дна и откоса подводной выемки путем контролирования вертикальных и горизонтальных перемещений грунтозаборного органа. Поставленная цель достигается тем, что на землесосном снаряде смонтирован датчик, снабженный индикатором с сигнальными электролампочками и двумя элементами, моделирующими взаимное расположение выемки и грунтозаборного органа, причем первый из элементов выполнен составным из шарнирно соединенных между собой поверх,ностей, форма которых соответствует Очертанию дна и откоса выемки, а второй - в виде пластины с контактными выключателями.
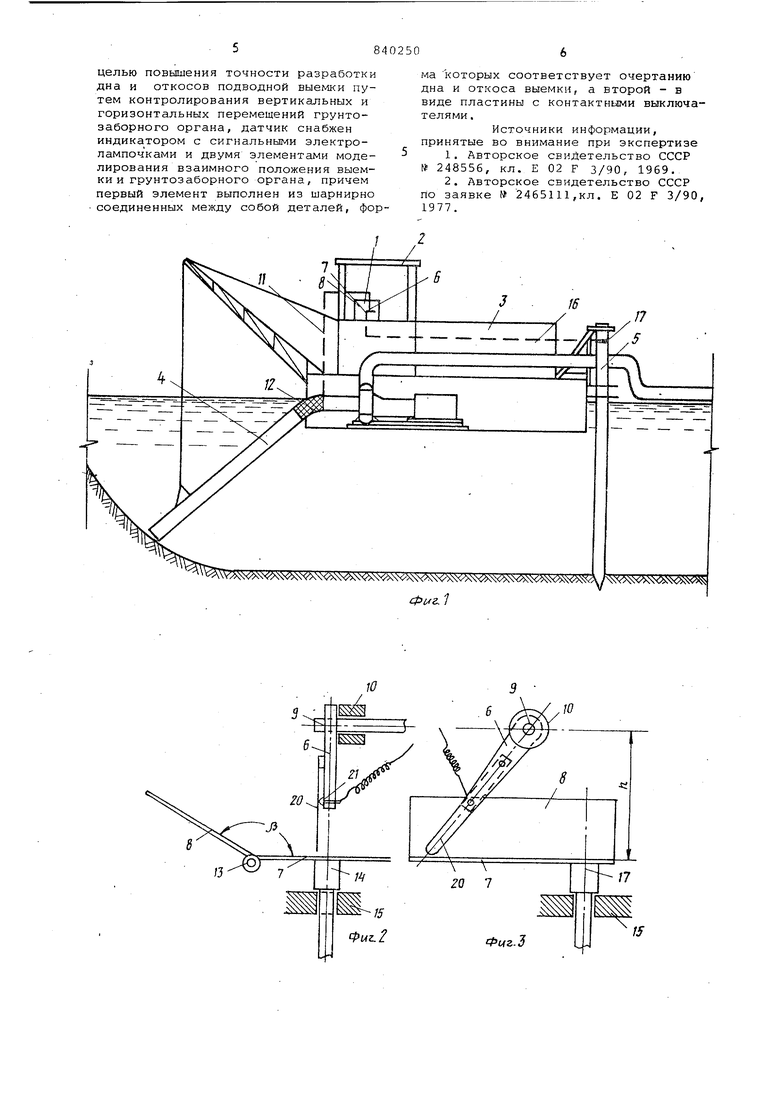
На фиг.1 показано предлагаемое устройство, ббщий вид; на фиг.2 принципиальная схема датчика; на . фиг. 3 - датчик, вид . сбоку; на фиг,4 - то же, вид сверху; на фиг.5 электрическая схема сигнализации датчика.
Устройство для контроля управления земснарядом включает датчик 1, размещенный в рубке 2 землесосного снаряда 3, грунтозаборный орган 4 и папильонажные сваи 5.
Регистрирующий орган б датчика 1 моделирует раму грунтозаборного устройства с грунтозаборным органом 4. Деталь 7 моделирует дно подводной выемки, а деталь 8 - откос. Валик 9, на котором укреплен регистрирующий орган б, установлен во втулке 10 с возможностью поворота. Валик 9 связан электрической цепью 11 содержащей, например вращающийся трансформатор 12, с грунтозаборным органом 4 так, что его повороты точно повторяют повороты грунтозаборного органа 4. Благодаря этой связи изменение величины h (фиг.З) в известном масштабе повторяет изменения глубины погружения грунтозаборного органа 4. Таким образом, подъем или опускание рамы грунтозаборного органа 4 земснаряда, или чт то же самое, изменение глубины разработки грунта, вызывает соответствющий подъем или опускание регистрирующего органа 6 датчика 1.
Детали 7 и 8 соединены -между собой шарниром 13, вследствие чего угол fb между ними (фиг. 2) может быть сделан равным заданному углу между дном и откосом выемки. Детали 7 и 8 представляют собой плоскости, однако им может быть придана любая форма с тем, чтобы получился профил геометрически подобный заданному профилю подводной выемки.
Детали 7 и 8 прикреплены к валик 14, который может свободно поворачиваться во втулке 15. Валик 14 и детали 7 и 8 связаны электрической цепью 16, содержащей вращающийся трансформатор 17с папильонажной свае 5 так, что повороты земснаряда 3 с грунтозаборным органом 4 повторяют. в известном масштабе положение грунтозаборного органа земснаряда относительно дна и откоса проектного очертания подводной выемки.
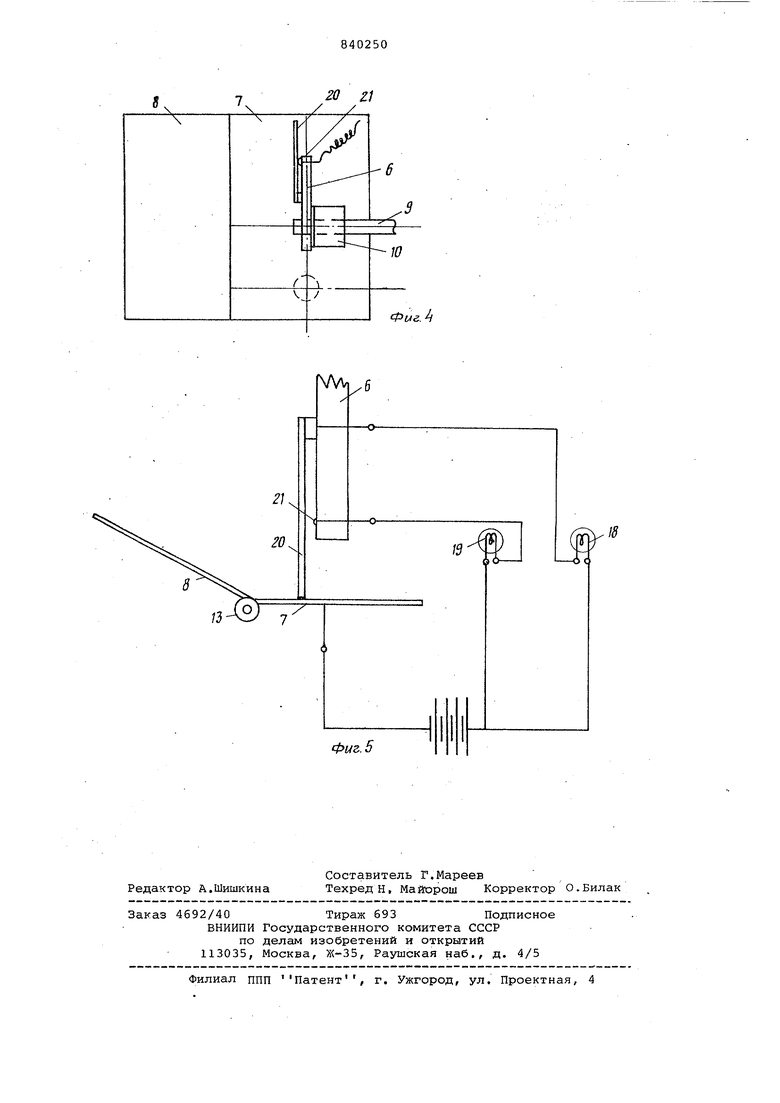
Устройство для контроля управления землесосным снарядом снабжено индикатором (фиг.5) для информации оператора за правильным согласованием скоростей перемещения грунтоза.борного органа в вертикальной и горизонтальной плоскостях или что то же, о точности разработки грунта в подводной выемке. Индикатор состоит из двух электрических лампочек 18 и 19, размещенных в рубке 2 земснаряда 3. Регистрирующий орган б, моделирующий грунтозаборный орган 4, включает элетропроводную пластинку 20,размещенную на регистрирующем органе б из диэлектрического материала, и контактный выключатель 21 с нормально разомкнутым состоянием.
Устройство для контроля управления земснарядом работает следующим образом.
При разработке грунта под водой по заданному профилю дна и откоса выемки и правильных перемещениях грунтозаборного органа 4 земснаряда 3, включена одна электрическая лампочка 18. Если землесосный снаряд начинает разрабатывать дно или откос грунтовой выемки с перебором,то загорается вторая электрическая лампочка 19. Достигается это тем, что включается, контактный выключатель 21 при касании пластинки 20, размещенной на регистрирующем органе б, к деталям 7 и 8. При движении же грунтозаборного органа 4 по заданной траектории пластинка 20 скользит по поверхности деталей 7 и 8 и включается только электрическая лампочка 18. В тех случаях, когда грунтозаборный орган 4 опускается ниже чем это нужно, или врезается в откос больше, чем нужно, т.е.начинается разработка грунтовой выемки с перебором, детали 7 и 8 поворачиваются во втулке 15, а регистрирующий орган 6 во втулке 10 так, что пластинка 20 прижимается к контакту 21 и загорается электрическая лампочка 19.
Если грунтозаборный орган 4 поднят выше, чем это следует для разработки дна или откоса, выемки заданного профиля, то при перемещении регистрирующего органа б во втулке 9 и деталей 7 и 8 во втулке 15, нарушается контакт между пластинкой 20 и деталями 7 и 8, т.е. происходит отключение электрической лампочки 18 что свидетельствует- о недоборе грунт
Формула изобретения
Устройство для контроля управления землесосным снарядом, включающее датчик положения снаряда в пространстве, связанный с грунтозаборным opraiHOM и папильонажными сваями, отличающееся тем, что, с
целью повышения точности разработки дна и откосов подводной выемки путем контролирования вертикальных и горизонтальных перемещений грунтозаборного органа, датчик снабжен индикатором с сигнальньлми электролампочками и двумя элементами моделирования взаимного положения выемкии грунтозаборного органа, причем первый элемент выполнен из шарнирно соединенных между собой деталей,
ма которых соответствует очертанию дна и откоса выемки, а второй - в виде пластины с контактными выключателями .
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 248556, кл. Е 02 F 3/90, 1969.
2.Авторское свидетельство СССР по заявке № 2465111,кл. Е 02 F 3/90, 1977.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разработки грунта при строительстве каналов | 1983 |
|
SU1161630A1 |
| Землесосный снаряд | 1984 |
|
SU1145094A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПАПИЛЬОНИРОВАНИЯ ЗЕМЛЕСОСНОГО СНАРЯДА С НАПОРНЫМ СВАЙНЫМ ХОДОМ | 1969 |
|
SU242761A1 |
| Свайное устройство земснаряда | 1978 |
|
SU819276A1 |
| Земснаряд | 1978 |
|
SU825791A1 |
| Землесосный снаряд | 1972 |
|
SU574506A1 |
| ТРОСОВОЕ УСТРОЙСТВО ДЛЯ РАБОЧИХ ПЕРЕМЕЩЕНИЙ ЗЕМСНАРЯДА ПРИ СТРОИТЕЛЬСТВЕ И ОЧИСТКЕ КАНАЛА ОТ НАНОСОВ | 2011 |
|
RU2473733C1 |
| Землесосный снаряд | 1988 |
|
SU1645390A1 |
| ЗЕМЛЕСОСНЫЙ СНАРЯД | 1970 |
|
SU284717A1 |
| Устройство для контроля положения грунтозаборного органа землесосного снаряда | 1977 |
|
SU655782A1 |
fWv, .6
Фиг. 5
Фыг..
