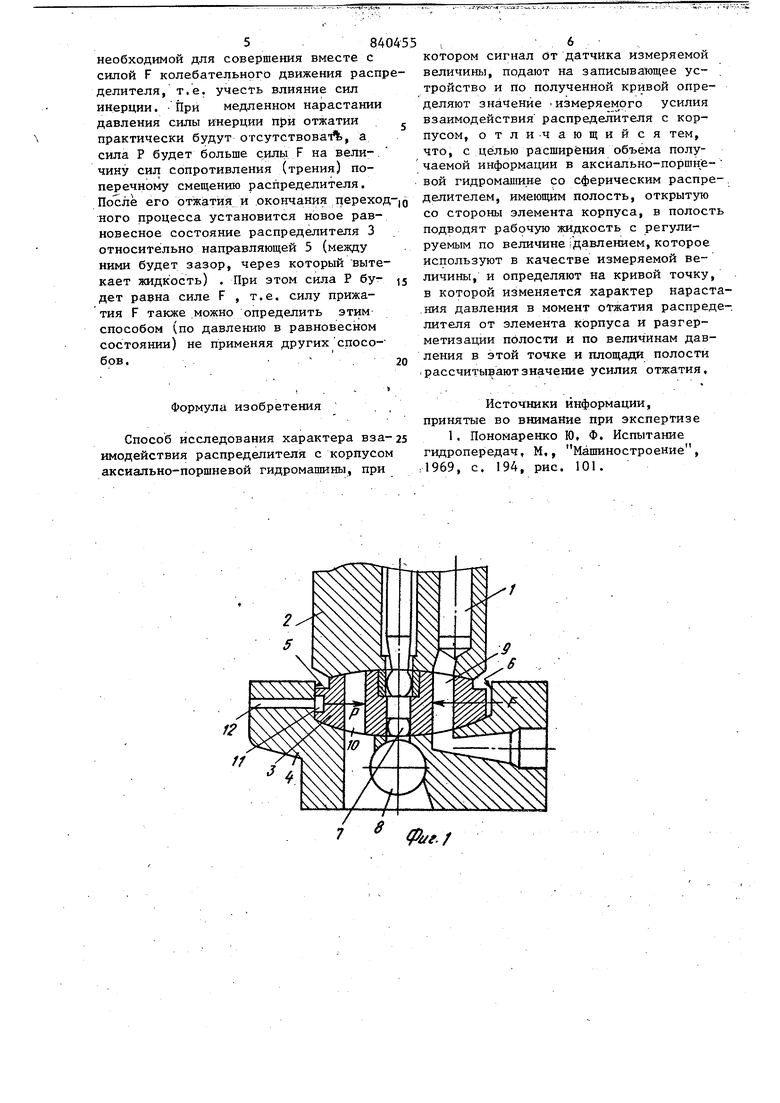
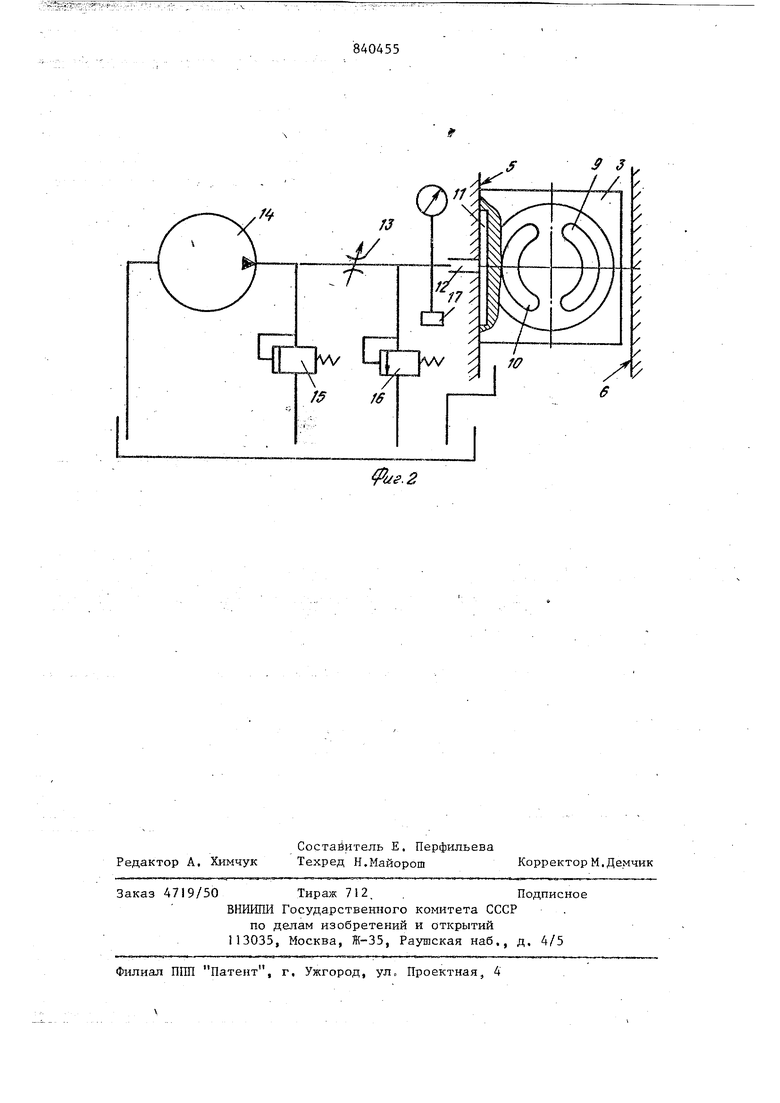
устройства для проведения исследовани по предлагаемому способу. . Устройство для проведения исследований содержит реальные элементы аксиально-поршневой гидромашины с регулируемым углом наклона блока цилиндров, установленный в«корпусе приводной вал с диском, связанным чере шатуны с поршнями (на чертеже не пока заны), входящие в полости 1 HaiuioHного блока 2 цилиндров, опиракицегося через распределитель 3 на сферическую поверхность корпуса 4, На корпусе 4 имеются направляющие 5 и 6, между которыми с зазором установлен своими плоскими боковыми сторонами распределитель 3. В центре распределителя имеется отверстие, в которое заведен палец 7 механизма 8 перемещения распределителя 3 вдоль направляющих 5 и б непосред твенно по корпусу 4. В распределителе с одйой стороны оси указанного механизма 8 имеется нагнетательное окно 9, а с другой - вс сывающее окно 10, На боковой, поверхно ти распределителя 3 со стороны всасывающего окуа 10 вы1Грлн1ена полость 11, открытая в сторону направляющей 5, в которой напротив полости 11 имеется канал 12, связанный через дроссель 13с самостоятельным источником 14 регулируемого давления рабочей жид кости. Между этим источником . 14 и , дросселем 13 установлен предохранител ный клапан 15, а за дрбсселем 13 нагрузочш 1й клапан 16, между которым и полостью 11 к каналу 12 подключен датчик давления 17, электрически связанный с регулирующим устройством (на чертеже не показано), например с осциллографом, . Устройство работает следующим образом. При вращении приводного вала поршн совершают возвратно-поступательное движение относительно полостей 1 блока 2 цилиндров, благодаря чему происходит- всасывание и нагнетание рабочей яотд&Ьсти (работа в режиме насоса) Произвс ительность наЬоса регули- . руется путем изменения угла наклона, блока 2 цилиндров относительно оси приводного вала, что осуществляется перемещением распределителя 3 вдойь направляющих 5 и 6 и механизмом 8, Пр этом под давлением находятся одновременно несколько полостей 1, и равнодействующая этих сил расположена на некотором расстоянии от оси блока 2 цилиндров и распределителя 3 (на стороне нагнетательного окна 9). Вследствие сферической формы прилегающих поверхностей корпуса 4 и распределителя 3, а также блока цилиндров 2, в реальной гидромашине появляется поперечная сила F,постоянно Нагружающая распределительЗ в сторону направляющей 5,3 зависимостиот режимовработы (давление,производительность, температура и т,п,)особенностей конструкции (ти-j поразмер,материал, качество обработки прилегающихповерхностей) эта сила Fможет изменяться в широких пределах., Измерение силы F j прижимающей распределитель 3 к направляющей 5, а также силы Р, необходимой для преодоления силы F и для отжатия распределителя 3 от направляющей 5 на разных скоростях и для осуществления его колебаний (с учетом сил инерции и т,д,) .и является объектом исследования, Для этого в полость 11 через канал 12 от источника 14 подают рабочую жидкость с постепенным на растанием давления с задаваемой скоростью (распределитель 3 при этом в начальный период под действием силы Р прижат к направляющей 5, поверхности контакта которых притерты, благодаря чему происходит герметизация полости 11), Датчик давления 17 постоянно подает сигнал о характере нарастания давления на регистрирующее устройство, которое вычерчивает Кривую давления. Давление в полости И создает силу Р, направленную проти1воположно силе F и стремящуюся отжать распределитель 3 от направляющей 5, В момент отжатия происходит разгерметизация полости 11, давление падает, что регистрируется на кривой, на которой характер нЗрастания Давления в этот момент изменяется. Давление, соответствзгющее точке на кривой изменения характера нарастания давления, умноженное на площадь полости 11, показывает величину силы Р, неЧ обходимую для отжатия распределителя, При увеличений скорости нарастания давления и тем самым скорости перемещения при отжатии сила Р возрастает, так как при этом, кроме силы F, необходимо преодолеть силы инерции при перемещении распределителя с бликом 2 цилиндров и поршнями, силы сопротивления и т, .п. Таким образом можно получить информацию о значении силы Р1 584 необходимой для совершения вместе с силой F колебательного движения расп делителя, т.е. учесть влияние сил инерции. -При медленном нарастании давления силы инерции при отжатии практически будут oTcyTCTBOsaffe, а сила Р будет больше с,илЕз1 F на вели-, чину сил сопротивления (трения) поперечному смещению распределителя. После его отжатия и .окончания перехо ного процесса установится новое равновесное состояние распределителя 3 относительно направляющей 5 (между ними будет зазор, через который выте кает жидкость) . При этом сила Р будет силе F , т.е. силу прижатия F также можно определить этимспособом (по давлению в равновесном состоянии) не применяя другихспособов. Формула изобретения Способ исследования характера вза имодействия распределителя с корпусо аксиально-поршневой гидромашины, при котором сигнал От датчика измеряемой величины, подают на записывающее устройство и По полученной кривой определяют значение Измеряемого усилия взаимодействия распределителя с корпусом, отл иЧающийся тем, что, с целью расширения объема получаемой информации в акснально-поршнёвой гидромашине со сферическим распре-. делителем, имеющим полость, открытую со стороны элемента корпуса, в полость подводят рабочую жидкость с регулируемым по величине;давлением,которое используют в качестве измеряемой величины, и определяют на кривой точку, в которой изменяется характер нарастания давления в момент отжатия распределителя от элемента корпуса и разгерметизации полости и по величинам давления в этой точке и площади полости рассчитываютзначение усилия отжатия. Источники информации, принятые во внимание при экспертизе 1. Пономаренко Ю, Ф. Испытание гидропередач, М,, Машиностроение, 1969, с. 194, рис, 101.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аксиально-поршневая гидромашина с регулируемым углом наклона блока цилиндров | 1979 |
|
SU918498A2 |
| Аксиально-поршневая гидромашина с регулируемым углом наклона блока цилиндров | 1979 |
|
SU857535A1 |
| Аксиально-поршневая гидромашина с регулируемым углом наклона блока цилиндров | 1979 |
|
SU857534A1 |
| Аксиально-поршневая гидромашина с регулируемым рабочим объемом | 1980 |
|
SU1041740A1 |
| РЕГУЛИРУЕМАЯ АКСИАЛЬНО-ПОРШНЕВАЯ ГИДРОМАШИНА | 1997 |
|
RU2135826C1 |
| Аксиально-поршневая регулируемая гидромашина | 1986 |
|
SU1397617A1 |
| АКСИАЛЬНО-ПОРШНЕВАЯ ГИДРОМАШИНА | 2001 |
|
RU2272176C2 |
| Аксиально-поршневая гидромашина | 1987 |
|
SU1645606A1 |
| Аксиально-поршневая регулируемая гидромашина | 1985 |
|
SU1268798A1 |
| Регулируемая аксиально-поршневая гидромашина | 1990 |
|
SU1760160A1 |
/-/
г ./
840455
uff.2
