Изобретение относится к автомати ческому регулированию, в частности к системам управления экспериментал ными установками, и предназначено для испытаний приборов и машин на электродинамическом вибрационном стенде. По основному авт. св.. 491932 известна система управления вибростендом, содержащая датчик вибраций соединенный через усилители со входом усилителя обратной связи, после довательно соединенные задающее уст ройство, элемент сравнения и управляющее устройство, соединенное с -ви ростендом, фазовый ключ, фильтр, . фазосдвигающий блок и два формирова теля, вход одного из которых подклю чен к выходу задающего устройства, вход другого,- к выходу усилителя, выходы обоих формирователей подключены к соответствующим входам фазового ключа, выход которого через фильтр связан с одним из входов фазосдвигающего блока, с другим входо которого соединен выход усилителя обратной связи, а выход - с соответ ствующим входом элемента сравнения llв известной системе для повышения точности воспроизведения вибраций и улучшения условий устойчивости устранен сдвиг по фазе между сигналами, поступающими на элемент сравнения, выходной сигнал которого преобразуется управляющим устройством в сигнал управления вибростендом. Следовательно, для формирования сигнала управления вибростендом требуется наличие выходного сигнала элемента сравнения. Однако, наличие выходного сигнала элемента сравнения обуславливает отличие амплитуд сигналов задающего устройства и усилителя, что приводит к зависящей от частоты виброиспытаний ошибке по амплитуде между сигналами задающего устройства и усилителя, которая определяется выражением 1 (jw)| где Ах - амплитуда сигнала задающего устройства; K(jw) общий коэффициент передачи управляющего устройства и вибростенда на частоте виброиспытаний W.
Цель изобретения - повышение точности воспроизведения вибраций, т.е. точности системы.
Поставленная достигаетод тем что в систему управления вибростендо введены последовательно соединенные дополнительный элемент сравнения, фазовый детектор, группа ключевых элементов, интегратор и усилитель с регулируемым коэффициентом усиления, второй вход которого подключен к выходу задающего устройства, ко второму входу фазового детектора и к первому входу дополнительного элемента сравнения, а выход - к соответствующему входу элемента сравнения, причем второй вход дополнительного элемента сравнения подсоединен, к выходу фазосдвигающего блока.
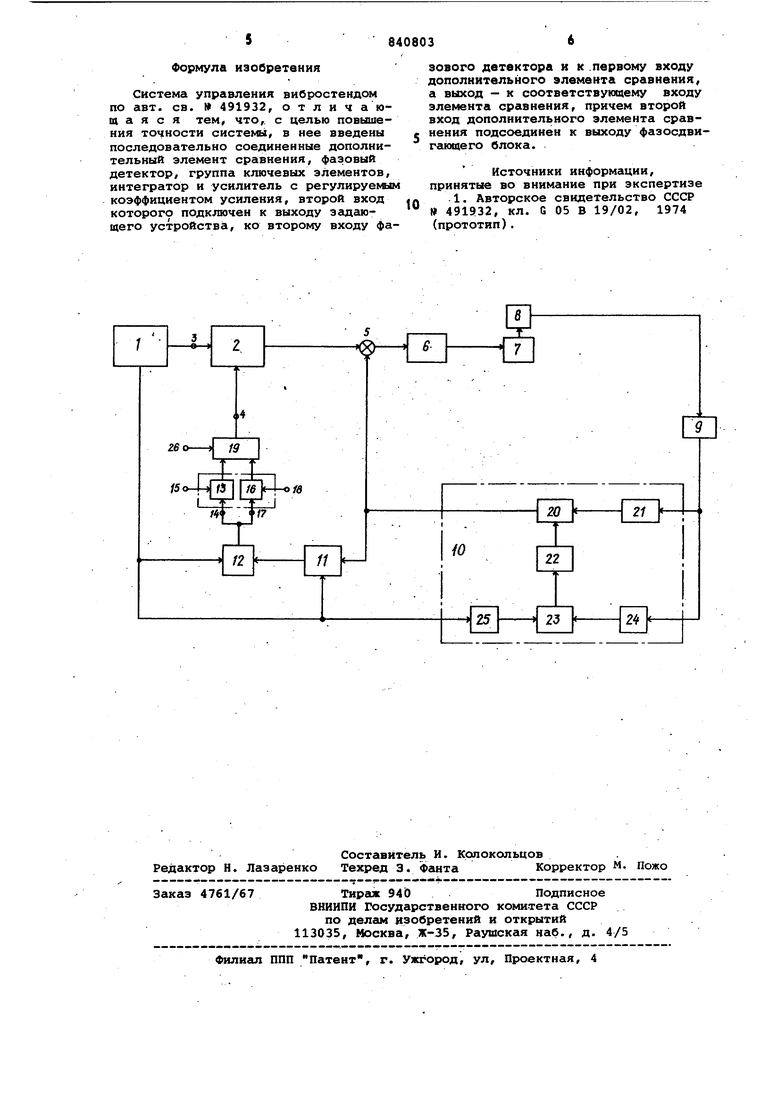
На черт.еже представлена блок-схема системы.
Система содержит задающее устройство 1, усилитель 2 с регулируемым коэффициентом усиления, имеющий преобразующий 3 и управляющий 4 входы, элемент 5 сравнения, управляющее устройство 6, вибростенд 7 с испытуемым объектом, датчик 8 вибраций, усилитель 9, устройство 10 для корректировки фазы, дополнительный элемент 11 сравнения, фазовый детектор 12, ключевой элемент 13 с управляющим 14 и преобразующим 15 входами, ключевой элемент 16 с управляющим 17 и преобразующим 18 входами, интегратор 19, фазосдвигающий блок 20, усилитель 21 обратной связи, фильтр 22, фазовый ключ 23 и формирователи 24 и 25.Система работает следующим образом.
Гармонический сигнал x(t) с устройства 1 через усилитель 2 поступает на элемент 5, где сравнивается с выходным сигналом 2 (t) устройства 10. Сигнал рассогласования E(t) поступает на устройство б, которое преобразует его в сигнал управления вибростендом 7. Колебания испытуемог объекта, установленного на платформе вибростенда, преобразуются с помощью датчика 8 в электрический сигнал, который усиливается усилителем 9. Выходной сигнал y(t) усилителя 9, являющийся одновременно и выходным сигналом у(t) системы, через устройство 10 поступает на элементы 5 и 11 В устройстве 10 происходит корректировка фазы сигнала у{t) без изменени его ё1мплитуды таким образом, что устраняется сдвиг по фазе между сигналами 2 (t) и X (t). Начальный коэффициен передачи усилителя 2, равный единице устанавливается при отключенны: от интегратора 19 элементах 13 и, 1б при помощи опорного напряжения MQ , поступающего на вход 26 задания начальных условий интегратору 19. В таком случае установившееся значение ошибки по амплитуде системы между сигнаами x(t) и y(t) (амплитуды сигнгшов ) и y(t) равны) равно амплитуде сигнала Е (t) и определяется выражением (1). Ошибка эта зависит от частоты виброиспытаний и всегда отлична т нуля. Полное устранение ошибки по амплитуде между сигналами х(t) и у(t) возможно подключением элементов 13 либо 16 ко входам интегратора 19. В этом случае коэффициент усиления усилителя 2 регулируется либо в сторону увеличения, либо в сторону уменьшения от значения единицы в зависимости от амплитуды ошибки 2(1) x(t) - z(t). Так как фазы сигналов x(t) и z (t) совпадают, то при Ах Az (Az - амплитуда сигнала z(t)) , совпадают тгакже фазы сигналов E2.(t) .x(t) (сигнал z(t) поступает на вычитающий вход элемента 11), а при фазы сигналов ) и x(t) отличаются на 180°. При Ах . Az выполняется условие Е (t)0. Выходной сигнал ) детектора 12 при подаче на его входы сигналов E4(t) и x(t) положительный при Лх Аг, так как фазы сигналов E2.(t) и x(t) совпадают, отрицательный при и равен нулю при Ах Az. При Z2(t) О срабатывает элемент 13 и ко входу интегратора 19 подключается напряжение Чэпг поступающее на вход 15 элемента 13. Выходной сигнал /л)пр интегратора 19 уменьшается. Уменьшение напряжения Vvjnp на входе 4 усилителя 2 способствует увеличению коэффициента усиления усилителя 2, что вызывает увеличение амплитуды сигналов y(t), z(t). Уменьшение напряжения происходит до тех пор, пока амплитуды сигналов x(t) и z(t) не сравняются. В этом случае выполняется соотношение E,2(t) 0,z,2.(t), а элемент 13 отключает напряжение Von2. от входа интегратора 19. При Za(t) 0 ко входу интегратора -19 подключается -, поступающее на вход 18 элемента 16, что вызывает увеличение напряжения « уменьшение коэффициента усиления усилителя 2,. уменьшение амплитуд сигналов y(t), z (t) и E2(t). В обоих случаях автоматическим регулированием коэффициента усиления усилителя 2 обеспечивается стремление E2(t) к нулю.
Таким образом, полностью устраняется ошибка по амплитуде между сигналами x(t) и y(t).
Использование в системе управления вибростендом вновь введенных элеентов с указанными связями выгодно тличает предлагаемую систему управения вибростендом от известной системы, так как она позволяет существенно повысить точность воспроизведения вибраций.
Формула изобретения
Система управления вибростендом по авт. св. 491932, о т л и ч а rota а я с я тем, что,, с целью повышения точности системы, в нее введены последовательно соединенные дополнительный элемент сравнения, фазовый детектор, группа ключевых элементов, интегратор и усилитель с регулируеьвлм коэффициентом усиления, второй вход которого подключен к выходу эадгиощего устройства, ко второму входу фазового детектора и к .первому входу дополнительного элемента сравнения, а выход - к соответствующему входу элемента сравнения, причем второй вход дополнительного элемента сравнения подсоединен к выходу фаэосдвигающего блока.
Источники информации, принятые во внимание при экспертизе
.1. Авторское свидетельство СССР 491932, кл. G 05 В 19/02, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления вибростендом | 1979 |
|
SU824144A2 |
| Система управления вибростендом | 1980 |
|
SU941933A2 |
| Вибростенд | 1979 |
|
SU877483A1 |
| Система управления вибростендом | 1982 |
|
SU1117588A1 |
| Система управления вибратора | 1986 |
|
SU1315936A1 |
| Устройство для регулирования виброколебаний | 1982 |
|
SU1089556A1 |
| Устройство для определения параметров колебаний элементов конструкции | 1988 |
|
SU1700411A1 |
| Устройство для управления вибро-СТЕНдОМ | 1978 |
|
SU807208A1 |
| Способ определения резонансной частоты элементов конструкции | 1987 |
|
SU1633294A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЭЛЕМЕНТОВ КОНСТРУКЦИИ | 1991 |
|
RU2025667C1 |
5
