(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВИВРОСТЕНЦОМ .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вибростендом | 1980 |
|
SU883865A1 |
| Система управления вибростендом | 1979 |
|
SU840803A2 |
| Система управления вибростендом | 1979 |
|
SU824144A2 |
| СПОСОБ ВИБРОИСПЫТАНИЙ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2729980C1 |
| Устройство для управления динамическими испытаниями | 1986 |
|
SU1361504A1 |
| СПОСОБ ВИБРАЦИОННЫХ ИСПЫТАНИЙ ОБЪЕКТОВ | 1990 |
|
RU1773164C |
| СПОСОБ ВИБРОИСПЫТАНИЙ ОБЪЕКТА НА ЭЛЕКТРОДИНАМИЧЕСКОМ ВИБРОСТЕНДЕ | 2022 |
|
RU2784480C1 |
| Система управления вибростендом | 1980 |
|
SU941933A2 |
| Устройство для вибрационных испытаний объектов | 1986 |
|
SU1383125A1 |
| Вибростенд | 1979 |
|
SU877483A1 |
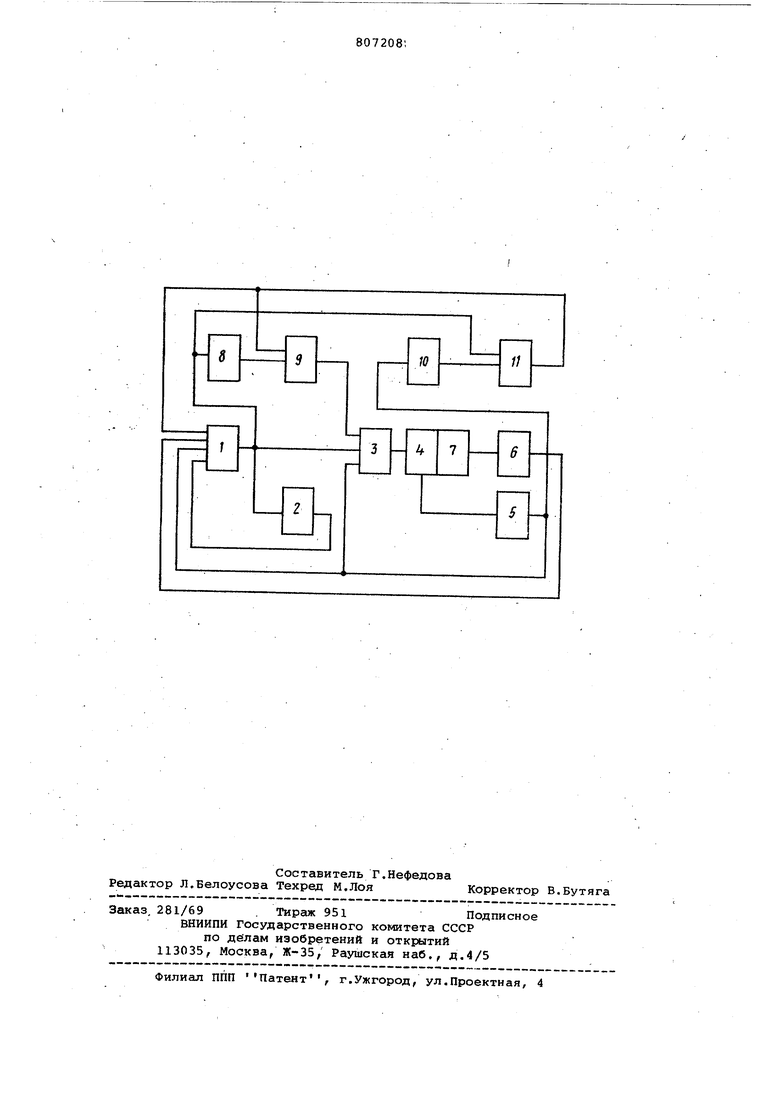
Изобретение относится к устройст вам управления виброиспытаниями и предназначено для управления виброиспытаниями объектов с применением управляющих ЭВМ. Известны устройства управления вибростендами, содержащие многоканальную замкнутую систему управления, работающую по заданной програм ме, многоканальные анализаторы спек тра, блок памяти 1. Наиболее близким по технической сущности к предлагаемому является система виброиспытаний, содержащая последовательно соединенные блок вычисления спектра сигнала,, вычисли теля, блок сравнения, вибростенд и первый датчик вибрации, а также вто рой датчик вибраций, вход которого подсоединяется к объекту испытания, причем выход первого датчика вибраций соединен со вторым входом блока сравнения и вторым входом вычислите ля, третий вход которого соединен с выходом второго датчика вибрации,а выход - со входом блока вычисления спектра сигнала 2, Однако в этой системе, являющейся типичным представителем центра.лизованных систем, вычислитель осуществляет как процессы задания и контроля режимов, так и сбор информации о состоянии объекта и обработку данных испытаний. Это существенно снижает производительность cиcтe ы. Цель изобретения - увеличение быстродействия устройства. Поставленная цель достигается тем, что в устройство введены блок записи и воспроизведения сигналов, усилитель, первый вычислительный блок и второй вычислительный блок, выход которого соединен с четвертым входом вычислителя и первым входом усилителя, а первый вход - с выходом первого вычислительного блока, вход которого соединен с выходом первого датчика вибраций, выход вычислителя соединен со вторым входом второго вычислительного блока и входом блока записи и воспроизведения сигнала, выход которого соединен со вторым входом усилителя, выход которого соединен с третьим входом блока сравнения. На чертеже приведена блок-схема устройства. Устройство содержит вычислитель |1 вибрационных характеристик, блок 2 вычисления спектра сигнала, блок 3 сравнения, вибростенд 4,первый и второй датчики 5 и 6 вибраций, объект 7 испытаний, блок 8 записи и воспроизведения сигналов, усилителя 9, блок 10 вычисления матрицы вероят ностных характеристик, блок 11 вычисления сигнала управления. Устройство работает следующим образом.. В режиме идентификации, целью которого является получение матриц передаточных функций вибростенда 4 и объекта 7, вычислителя 1 с применением блока 2 вычисления спектра си17нала формирует скалярный случайный процесс и через цифроаналог вый преобразователь вычислителя 1 и блок 3 сравнения последовательно подает его на вибростенд 4, Блок 3 сравнения, вибростенд 4 и первый дат чик 5 вибраций образуют нормальный сервогидравлический, регулировочный контур, обеспечивающий соответствующее перемещение рабочего сто ла вибростенда 4. Назначение этого контура регулирования в ниже рассмат риваемых режимах работы системы аналогично. Реакция вибростенда 4 и объе та 7, которые представляют собой выходные сигналы первого и второго датчиков 5 и б вибрации соответствен но, поступают в вычислитель 1 через его аналого-цифровой преобразователь Впромежутках между выборкой координат сформированного процесса и затем в блоке вычисления спектра сигнала 2 вычисляются их преобразования Фурь Вычислитель 1, используя полученные комплексные коэффициенты преобразований Фурье, вычисляет элементы искомых матриц передаточных функций. Матрицы передаточных функций в:И.бростенда 4 являются исходным параметро для режима управления, который служи для выработки управляюцих воздействий на входе иибростенда 4 при дости жении заданной точности совпадения матрицы верюятностных характеристик реакции вибростенда 4 с эталонной матрицей.Последнюю определяет вычис литель 1 по заданной матрице вероят ностных характеристик выходного сиг нала объекта 7, рассчитанной по дан ным эксплуатации, и полученной в ре жиме идентификации матрицы его пере даточных функций, В качестве заданно матрицы используют, например,матриц спектральных плотностей. В режиме управления, используя математическую модель, отражакнцую зависимость мезкду матрицей вероятно ных характеристик реакции вибростенд . 4 и управляемлми. параметрами его входного сигнала, вычислителя 1 с применением блока 2 вычисления спек ра сигнала формирует по эталонной матрице вероятностных характеристик случайный процесс вибраций x(t) и ч рез цифроан ал6го1вый преобразователь вычислителя 1 и блок 3 сравнения подает его на вибростенд 4. Реакция вибростенда 4 y(t) с выхода датчи.ка 5 вибраций поступает в вычислитель 1 через ее аналого-цифровой преобразоватеЛь,Вычислитель 1 с применением блока 2 вычисления спектра сигнала вычисляет оценки соответствующих вероятностных характеристик,сравнивает их с эталонными и вычисляет вектор сяиибок, к которюму применяют итерационный алгоритм коррекции параметров случайного процесса вибрации x(t). По скорректированному вектору управляемых параметров вычислитель 1 формирует новый случайный процесс вибраций x(t) и через цифро-аналоговый преобразователь вычислителя Iи блок 3 сравнения подает его на вибростенд 4. Выполнение итера-ций производят до тех пор, пока.не будут выполнены условия соответствия матрицы вероятностных характеристик процесса y(t) эталонной.Если после нулевой инерции вектор ошибок не превьЕиает допустимой величины, коррекцию параметров случайного процесса вибраций x(t) не производят. В заключение режима управления вычислитель 1 записывает сформированный сигнал управляющих воздействий на блок 8 записи и воспроизведения сигнала, а эталонную матрицу вероятностных характеристик - во второй вычислительный блок 11, В режиме виброиспытаний блок 8 подает сформированный сигнал вибраций x(t) через усилитель 9 и блок сравнения 3 на вибростенд 4. Сигнал реакции вибростенда 4 поступает с выхода первого датчика 5 вибраций на вход первого вычислительного блока 10, где вычисляют матрицу его вероятностных характеристик. Элементы последней в блоке 11 вычитают из соответствующих элементов эталонной матрицы и по результирующему вектору ошибок формир5ют сигнал управления, который поступает на вход усилителя 9, изменяя соответствующим образом амплитуду сигнала вибраций x(t). Одновременно в блоке 11 формируют критерий останова, характеризующий степень соответствия вычисленной в блоке 10 матрицы вероятностных характеристик эталонной. Если полученный критерий останова превышает допустимое значение, с выхода блока IIв вычислитель 1 поступает соответствующий сигнал и вычислитель 1 переводит систему в режим идентификации. По окончании режима идентификации вычислитель 1 перезаписывает вновь сформированный сигнал управляющих воздействий x(t) в блок 8 и возвращает систему в режим виброиспытаний которлй продолжается до тех пор, пока полученный в блоке И кри-, терий останова не превысит допустимое значение. Сигналы с контролируемых точек объекта 7 поступают через второй датчик вибраций 6 в вычислитель 1 через его аналого-цифроврй преобразователь. Вычислитель 1 с применением блока 2 вычисления cneitTpa сигнал обрабатывают данные испытаний: классифицируют циклы нагрузки по различ ным критериям, определяют коэффициент неравномерности и эффективное значение нагрузки,спектральные и корреляционные характеристики, функцию когерентности и т.п. Время проведения виброиспытаний задает таймер вычислителя 1, остановить работу сие , темы можно также с пульта управления вычислителя 1. Мгновенное состояние параметров испытания регистрируется быстродействующим печатающим устройством, входящим в комплект вычислителя 1, Состояние параметров испытания автоматически регистрируется при отключении сети и после ее повто ного включения, а также при к аждом сигнале помехи,. Производительность системы опрег деляется временем ее работы по испытанию объекта t. Согласно структуре системыгпрототипа это время определя ют как время работы вычислителя 6 ре жиме испытания где tp -общее время работы систе t - время подготовки системы у испы таниям; tp - время, затрачиваемое вы числителем на генерирование процессо возбуждения стенда; t - время контроля системы. В предлагаемой системе операции генерирования и контролй не входят в функции вычислителя и tof т.е. полезное время определяют как Тогда отношение t и 1дОПределит увеличение производительности системы „ ±.2. tn :::tj4. i- I I 11- t jto (t +tr+4) По предварительным оценкам от общего времени испытания объекта,%: t 100, t 4-11, t 32-40, а t 1032. Таким образом, соотношение (1) позволяет утверждать, что предлагаемая. система в Г,5-4 раза производительнее чем известная. Повышение степени децентрализации системы, осуществление постоянного контроля работы ее в течение всего режима испытания объекта позволяет повысить кроме производительности и надежность систелжл по сравнению с известной , где контроль осуществляют периодически. Формула изобретения Устройство для управления вибростендом, содержащее последовательно соединенные блок вычисления спектра ; сигнала, блок вычисления вибрационных характеристик, блок сравнения, а также первый м второй датчики вибрации, причем вход первого датчика вибраций соединен со вторым входом блока сравнения и вторым входом блока вычисления вибрационных характеристик,третий вход которого соединен с выходом второго датчика вибрации, а выход - со входом блока вычисления спектра сигнала, отличающееся тем,что, с целью увеличения быстродействия устройства в него введены блок записи и воспроизведения сигнала, усилитель, блок вычисления матрицы вероятностных характеристик и блок вычисления сигнала управления, выход которого соединен с четвертым входом блока вычисления вибрационных характеристик и первым входом усилителя, а первый вход - с выходом блока вычисления матрицы вероятностных характеристик, вход которого соединен с выходом первого датчика виёраций, выход блока рычисления вибрационных характеристик соединен со вторым входом блока вычисления сигнала управления и входом блока записи и воспроизведения сигнала, выход которого соединен со вторым входом усилителя, выход которого подключен к третьему входу блока сравнения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 602806, кл. -G 01 М 7/00,02.07.1974, 2.Jacoby G.Das Problem der Schwingfes-Schenck, Darmstadt, 1972 (прототип).
