Изобретение относится к устройствам для автоматического регулирования рабо ты пневмоподъемника и может быть исполь зовано в нефтеперерабатывающей и нефтехимической промьшленности. Известно устройство для автоматического регулирования работы пневмоподъемника для транспортирования гранулированных материалов в технологических процессах, содержащее датчики расхода воздуха, давления воздуха в дозере и пневмоподъемнике, демпфер, регуляторы и исполнительные механизмы П 3 Наиболее близким по технической сущности к предлагаемому является пневматическое устройство для транспортировки сыпучих материалов, содержащее реактор, соединенный линией подачи сьтучего материала с дозером, связанным с помощью пневмоподъемника с бункером-сепаратором, линию воздухопитания, соединенную с дозером каналами основного и вспомогательного потоков воздуха, в каждом из которых установлен исполнительный механизм, датчик расхода, установленный в канале основного потока воздуха и соединенньй с регулятором расхода, выход которого соединен с исполнительным механизмом канала основного потока воздуха, датчик грузоподъеьяюсти, установленный в дозере и соединенный с регулятором грузоподъемности, выход которого соединен с исполнительным механизмом канала вспомогательного потока воздуха, датчик величины аэро.п;инамического сопротивления, установленный в пневмоподъемнике и соединенный с анализатором, выходы которого соединены с регуляторами расхода и грузоподъемности 2. Недостаток известного устройства заключается в toM, что в нем не обеспечивается стабилизация давления воздуха, поступающего для транспортирования сыпучего материала, что приводит к хаотическому движению частицу материала и пылеообразованию. Это приводит к потерям транспортируемого материала.
Цель изобретения - сокращение потерь сыпучего материала.
Поставленная цель достигается тем что устройство содержит регулятор давления, позиционный регулятор, функциональный блок и датчик давления, установленный в линии воздухопита1шя и соединенный с регулятором давления и позиционным регулятором, выходы которых через функциональный блок соединешл с исполиительнмм механизмом, посредством которого линия воздухопитания сообщена с атмосферой.
Стабилизация давления в линии воз духопитания существсшю сокращает пылеобразование в пневмоподъемнике, а, следовательно, сокращает непроизводительные потери транспортируемого материала.
На чертеже изображена схема пневматического устройства для транспортировки материалов.
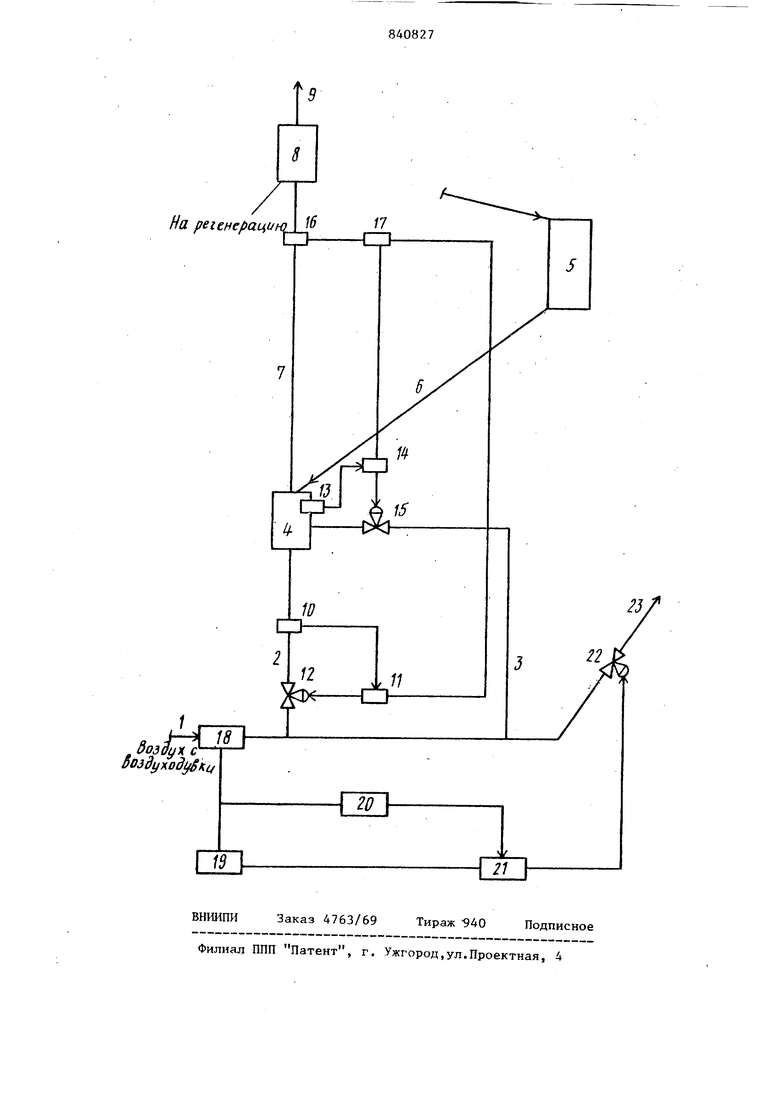
Воздух по линии 1 воздухопитания, разделанный на два потока, по каналу 2 основного потока и каналу 3 вспомогательного потока одновременно подается к дозеру А. Сыпучий материал из реактора 5 по линии 6 поступает в дозер 4, где с помощью воздуха, поступающего по каналу 3, подается в пневмоподъем1шк 7 и потоком воздуха, поступающего по каналу 2, транспортируется в бункер-сепаратор 8. Воздух по линии 9 выбрасывается в атмосферу а сыпучий материал подается на регенерацию. Расход воздуха Для транспортировки сыпучего материала по пневмоподъемнику 7 замеряется датчиком 10 расхода и регулируется регулятором 1 и исполнительным механизмом 12, установленным на канале 2. Величина давления в дозере 4, характеризующая грузоподъемность, замеряется датчиком 13 грузоподъёмности и регулируется регулятором грузоподъемности 14 и исполнительным механизмом 15 на канале 3.
Величина аэродинамического сопротивления в контрольной точке пневмоподъемника 7 замеряется датчиком величины аэродинамического сопротивления, сигнал от которого поступает в анализатор 17, где фиксируется импульс, пропорциональной скорости движения сыпучего материала, который поступает на регуляторы 14 и II.
Давление в линии воздухопитания измеряется датчиком 18 давления, сигнал от которого поступает одновременно к регулятору 19 давления и позиционному регулятору 20 и через функциональный блок 2J на исполнительньш механизм 22, установленный на линии 23 сброса воздуха .в атмосферу.
Устройство работает следующим образом.
При увеличении расхода воздуха в дозер 4 уменьшается давле1ше воздуха в линии подачи его, замеряемое датчиком 18 давления, пневмосигнал от KOTOpoiO поступает в регулятор 19, где сранивается с заданием, сигнал рассогласования проходит функциональный блок 21 и поступает на исполнительный механизм 22, установленный на ЛИ1ШИ 23,.уменьшая сброс воздха в атмосферу.
Прекращение транспортировки сыпучего материала по пневмоподъемнику 7 вызывает резкое увеличение в линии I нагнетания воздуха. При этом пневмосигнал от датчика 18 давления поступает к позиционному регулятору 20 и через функциональный блок 21 к исполнительному механизму 22 на линии сброса воздуха 23 в атмосферу причем, проходное сечение клапана подбирают таким, чтобы обеспечить сброс такого количества воздуха, которое поступает на дозер.
Формула изобретения
Пневматическое устройство для управления транспортом сыпучих материалов, содержащее реактор соединенный линией подачи сьшучего материала с дозером, связаиным с помощью пневмоподъемника с бункером-сепаратором, линию воздухопитания, соединенную с дозером каналами основного и вспомогательного потоков воздуха, в каждом из которых установлен исполнительный механизм, датчик расхода, установлениый в канале основного потока воздуха и соединенный с регулятором расхода, выход которого соединен с исполнительным механизмом канала основного потока воздуха, датчик грузоподъемности, установленный в дозере и соединенный с регулятором грузоподъемности, выход которого соединен с исполнительным механизмом канала вспомогательного потока воздуха, датчик величины аэродинамического сопротивления, установленный в пневмоподъемнике и соадяненный с анализатором, вькода которого соединены с регуляторами расхода и грузоподъемности, отличающееся тем, что, с цепью сокрап ения потерь сыпучего материала, оно содержит регулятор давления, позиционный регулятор, фун1сциональный блок и датчик давления, установленный в линии воздухопитания и соедннекньпЧ с регулятором давления и позиционным регулятором, выходы которых через функциональный блок соединены с испол штельным механизмом, посредством которого линия воздухопитания сообщена с атмосферой.
Источники информации принятые во внимание пои зкспертизе
1.Патент США 28J9121, кл. 302-53, опублик. 1957.
2.Авторское свидетельство СССР № 336239, кл. В 65 6 53/04, 1970 (прототип).
На регенераци.
дозоук сооздукодуёкк
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования рабочих параметров установки вертикального трубопроводного пневмотранспорта сыпучего материала | 1986 |
|
SU1359225A1 |
| Способ автоматического регулирования работы пневмоподъемника | 1976 |
|
SU604772A1 |
| Устройство для регулирования расхода газа | 1982 |
|
SU1118968A1 |
| Устройство для регулирования расхода газа | 1980 |
|
SU951246A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ РАСПЛАВА И ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ ЭКСТРУДЕРА ОТ ПЕРЕГРЕВАНИЯ | 2003 |
|
RU2239557C1 |
| ВСЕСОЮЗНАЯ IПМЕНТ1Ш-Е1л1ШН?:ИА[1БИБЛИОТЕКА | 1972 |
|
SU339290A1 |
| Регулятор уровня раствора | 1982 |
|
SU1059552A1 |
| Устройство для управления процессом ректификации | 1978 |
|
SU724160A1 |
| Система для управления периодическим процессом ферментации | 1989 |
|
SU1725203A1 |
| Устройство для регулирования низких давлений в проточном реакторе | 1984 |
|
SU1179274A1 |