1359225
Изобретение относится к трубопро-,
водному транспорту, а именно к уст- fjoftcTBy для автоматического регулирования режима пневмотранспорта сы- пучего материала в вертикальном трубопроводе.
Цель изобретения - повьшение точности -регулирования.
На чертеже изображена принципи- алоная схема устройства.
Из реактора 1 в дозер 2 подается сыпучий материал, который по трубо- проводу 3 поступает в бункер 4. Расход основного потока транспортирую- щего агента регулируется регулятором 5 давления с помощью датчика 6 расхода и исполнительного механизма 7, установленного на основном потоке 8 воздуха. Грузоподъемность регулиру- ется регулятором 9 давления с помощью датчика 10 грузоподъемности (давления) и исполнительного механизма 11, установленного на дополнительном потоке 12 воздуха..
Пульсация давления в контрольной точке трубопровода регулируется регулятором 13 пульсаций, связанным своим первым входом с выходом преобразователя 14 (усреднителя) пульса- ции давления, который соединен с выходом датчика 15 пульсации давления. Второй вход регулятора 13,связан с выходом сумматора 16, а выход - с исполнительным механизмом 17, уста новленным на байпасной линии 18 основного потока воздуха.
Сумматор 16 соединен первым входом с выходом селектора 19, связанного своим входом с вторым выходом датчика 5 пульсации давления и пред назначенного для селектирования первого максимального пика выходного сигнала датчика 15 пульсации давления, вторым входом - с выходом селек тора 20, связанного своим входом с третьим.выходом датчика 15 пульсации давления и предназначенного для селектирования первого минимального пика выходного сигнала датчика 15 пуль- 50 нала сумматора 16. Последний поступасации Давления, и третьим входом - с выходом ручного задатчика 21. Сумматор 16 предназначен для алгебраического суммирования входных сигналов ,
т.е.
Р,л
р., + р.
IJ
где Р,
- выходной ра 16;
if
сигнал
+ Р,
ет в камеру задания регулятора 13 и нарушает в нем равновесие, так как возникает рассогласование выходного сигнала преобразователя 14, соответ- 55 ствующего усредненному значению пульсации давления и заданному ее значе- нию. Для восстановления равновесия
суммато- регулятор 13 вьфабатывает измененный сигнал, который вызывает изменение
i
0
2/
ВЫХОДНОЙ сигнал селектора 1 9 ;
выходной сигнал селектора 20;
выходной сигнал ручного задатчика 21. Селектор 19 работает следующим образом.
13 if Р появлении первого максимального пика в выходном сигнале датчика 15 ( ).
f - , при отсутствии максимального пика в выходном сигна Sia((
- задание для
ле датчика 15; селектора 19.
Селектор 20 работает следующим, образом,
20 при появлении первого минимального пика в выходном сигнале датчика 15 (Р,.. ) .
Р
iO ZOf,
нимального пика
о
isпри отсутствии ми- в выходном сигнале датчика 15; Р j - задание для селектора 20.
Устройство работает следующим образом.
При изменении, например, понижении скорости движения сыпучего материала, вызванном изменением одного из параметров (снижение температуры материала или транспортирующего агента, или увеличение плотности материала и т.д.), пульсация давления замеряемая датчиком 15, изменяется (возрастает) и в выходном сигнале датчика, поступающем в селекторы 19 и 20, появляется пгпсовое значение (максимальный пик).
Измененный выходной сигнал селектора 19, равный значению максимального пика выходного сигнала датчика 19 в конкретном примере, поступает в сумматор 16, куда от ручного задатчика 21 поступает сигнал, соответствующий критической скорости движения материала для средних условий работы пневмоподьемника, и вызьшает изменение (увеличение) выходного сигположения исполнительного механизма 17, приводящее к изменению (увеличению) потока дополнительного воздуха.
Положение исполнительного механизма 17 изменяется до тех пор, пока пульсация давления, замеряемая датчиком 15, не достигает заданного значения и в регуляторе 13 не наступает равновесие.
При повьшении скорости движения материала последовательность действий элементов устройства: сохраняется только вместо селектора 19 работает селектор 20..
Формула изобретения
Устройство для автоматического регулирования рабочих параметров уста- новки вертикального трубопроводного пневмотранспорта сыпучего материала, содержащее связанные между собой датчик расхода и регулятор давления осРедактор И.Касарда Заказ 6108/22
Составитель Г.Киселева
Техред Л.Сердюкова Корректор И.Муска
Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 .
новного потока воздуха и датчик грузоподъемности и регулятор давления дополнительного потока воздуха, исполнительные механизмы основного и дополнительного потоков воздуха, связанные с соответствующим регулятором давления, датчик пульсации давления в контрольной точке вертикального трубопровода, связанный через преобразователь и регулятор давления с исполнительным механизмом на байпасной линии основного потока воздуха отличающееся тем, что, с цельй повьшения точности регулирования, оно снабжено двумя селекторами, сумматором и задатчиком давления, при этом выход датчика пульсации давления соединен с входами селекторов, выходы которых соединены с первым и вторым входами сумматора, третий вход которого соединен с выходом задатчи- ка, а выход - с вторым входом регулятора пульсации давления.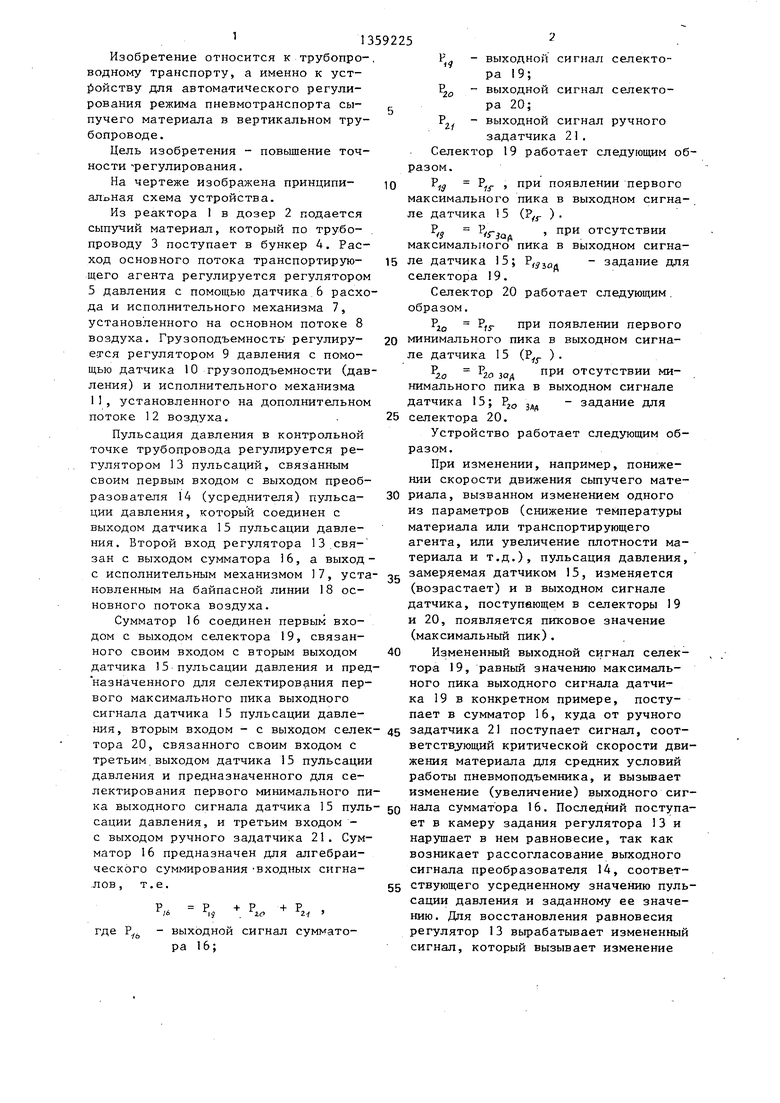
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования компрессорной станции | 1988 |
|
SU1701989A1 |
| Устройство для автоматического регулирования температуры в многозонных объектах | 1984 |
|
SU1285446A1 |
| Способ защиты от помпажа компрессора и устройство для его осуществления | 1988 |
|
SU1643800A1 |
| Устройство для управления транспортированием материала в пневмотранспортных системах | 1986 |
|
SU1474043A2 |
| Устройство для получения синтетического моющего порошка | 1978 |
|
SU787454A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| Система автоматического регулированияРАСХОдА ВОздуХА B шАХТНую пЕчь | 1976 |
|
SU815435A1 |
| Устройство для автоматического регулирования технологического режима массообменного аппарата | 1983 |
|
SU1181677A1 |
| Способ регулирования режима работы установки для гидротранспорта сыпучих материалов и устройство для его осуществления | 1987 |
|
SU1615096A1 |
Изобретение относится к области трубопроводного пневмотранспорта. Цель изобретения - повьшение точности регулирования. Устройство для автоматического регулирования параметров установки вертикального трубопроводного пневмотранспорта сыпучего материала содержит установленный на вертикальном трубопроводе датчик 15 пульсации, который выходами ,с селекторами 19 и 20, выходы которых и выход задатчика 21 давления соединены с входами сумматора 16, выход которого соединен с регулятором 13, связанным с исполнительным механизмом 17 на байпасной линии I8 основного потока воздуха. Регулятор 13 вырабатывает измененный сигнал, который вызывает изменение положения исполнительного механизма I7, приводящее к изменению потока дополнительного воздуха. 1 ил. а (Л
| Химия и технология топлив и масел, № 7, 1975, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
