1 Изобретение относится к электроизмерительной технике и может быть использовано для получения информации о местонахождении, направлении движения и скорости транспортных средств на автомобильных дорогах. Известны магнитные датчики .цля получения информации о координатах движущегося транспортного средства Они содержат, по крайней мере, одну излучающую обмотку, при возбуждении которой вокруг датчика образуется магнитное поле, воспринимаемое одно или несколькими приемными обмотками расположенными на датчике. Проникаю щая в это поле металлическая масса или транспортное средство возмущают его, и это возмущение обнаруживается приемными обмотками датчика Однако известные датчики обладают рядом недостатков, обусловленных тем, что приемные катушки расположе коллинеарно и слабо связаны между собой, что требует .придания сравни тельно больших физических размеров датчику. Кроме того, при отсутствии возмущающей проводящей массы необходимо осуществлять точную механическую регулировку относительного положения трех катушек, но такая предварительная регулировка может быть нарушена из-за окружающей обCTjaHOBKH на дороге. Цель изобретения - yMeHsiiieirtie габаритов и повышение чувствительности датчика. Эта цель достигается тем, что в электромагнитном датчике, чувствительном к изменению магнитного поля, которое он создает, содержащем, по меньшей мере, одну излучающую обмотку, две приемные обмотки и блок обработки данных, приемные обмотки, коэффициент связи между которыми, . по крайней мере, на порядок выше коэффициента их связи с излучающей обмоткой, расположены по обеим сторонам оси излучающей обмотки, причем их общая ось перпендикулярна оси излучающей обмотки. Излучающая и приемные обмотки в датчике расположены на ферромагнитной пластине, а вокруг приемных обмоток расположен электростатический экран. Кроме того, каждая приемная обмотка подключена к первому входу соответствующего усилителя, вторые вход которых связаны соответственно с первым и вторым выходами фазового компаратора, один вход которого соединен через первый преобразователь с излучающей обмоткой, другой вход через второй преобразователь - с выходми усилителей, а третий и четвертый выходы через логические блоки связаны с блоком обработки данных.
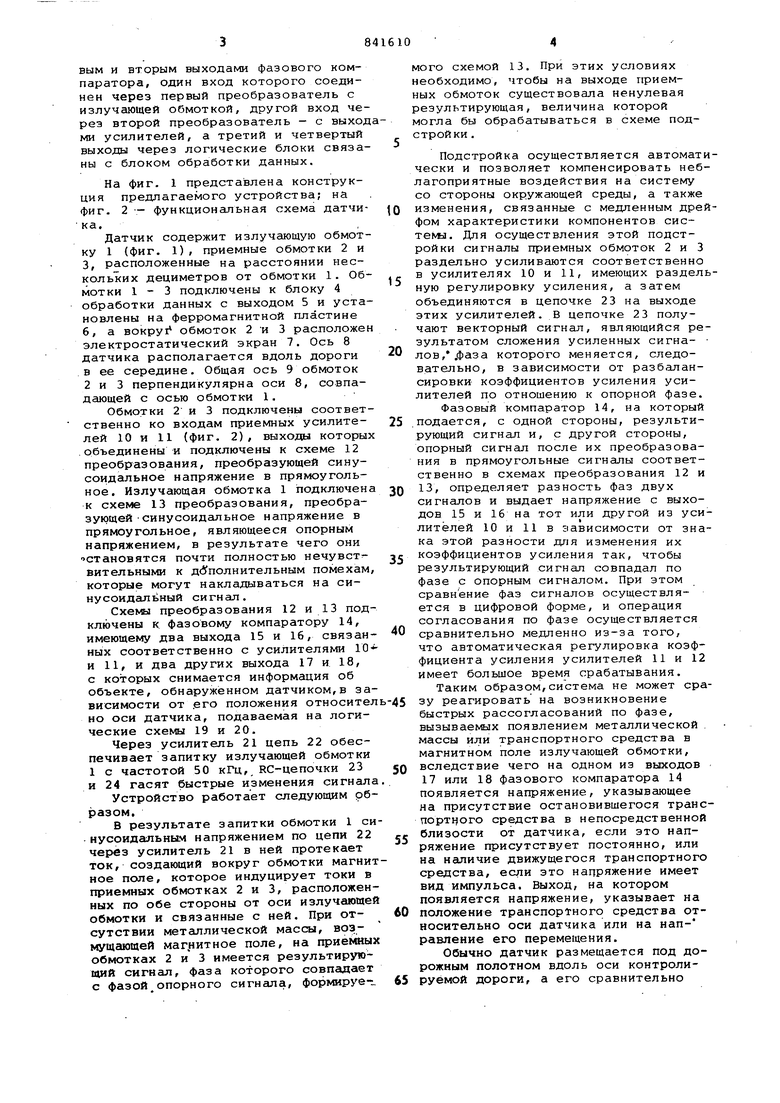
На фиг. 1 предста1влена конструкция предлагаемого устройства; на фиг. 2 - функциональная схема датчика.
Датчик содержит излучающую обмотку 1 (фиг. 1), приемные обмотки 2 и 3, расположенные на расстоянии нескольких дециметров от обмотки 1. Обмотки 1-3 подключены к блоку 4 обработки данных с выходом 5 и установлены на ферромагнитной пластине 6, а BOKpyi обмоток 2 и 3 расположен электростатический экран 7. Ось 8 датчика располагается вдоль дороги в ее середине. Общая ось 9 обмоток 2 и 3 перпендикулярна оси 8, совпадающей с осью обмотки 1.
Обмотки 2 и 3 подключены соответственно ко входам приемных усилителей 10 и 11 (фиг. 2), выходы которых .объединены и подключены к схеме 12 преобразования, преобразующей синусоидальное напряжение в прямоугольное. Излучающая обмотка 1 подключена к схеме 13 преобразования, преобразующей -синусоидальное напряжение в прямоугольное, являющееся опорным напряжением, в результате чего они становятся почти полностью нечувст вительными к д(5полнительным помехам, которые могут накладываться на синусоидальный сигнал.
Схемы преобразования 12 и 13 подключены к фазовому компаратору 14, имеющему два выхода 15 и 16, связанных соответственно с усилителями 11, и два других выхода 17 и 18, с которых снимается информация об объекте, обнаруженном датчиком,в зависимости от его положения относител но оси датчика, подаваемая на логические схемы 19 и 20.
Через усилитель 21 цепь 22 обеспечивает запит ку излучающей обмотки 1 с частотой 50 кГц, КС-цепочки 23 и 24 гасят быстрые изменения сигнала
Устройство работает следующим рбразом.
В результате запитки обмотки 1 синусоидальным напряжением по цепи 22 через усилитель 21 в ней протекает ток, создающий вокруг обмотки магнитное поле, которое индуцирует токи в приемных обмотках 2 и 3, расположенных по обе стороны от оси излучающей обмотки и связанные с ней. При отсутствии металлической массы, возмущающей магнитное поле, на приемных обмотках 2 и 3 имеется результирующий сигнал, фаза которого совпадает с фазой,опорного сигнала, формируе-
мого схемой 13. При этих условиях необходимо, чтобы на выходе приемных обмоток существовала ненулевая результирующая, величина которой могла бы обрабатываться в схеме подстройки.
Подстройка осуществляется автоматчески и позволяет компенсировать неблагоприятные воздействия на систему со стороны окружающей среды, а также изменения, связанные с медленным дрефом характеристики компонентов системы. Для осуществления этой подстройки сигналы приемных обмоток 2 и 3 раздельно усиливаются соответственно в усилителях 10 и 11, имеющих разделную регулировку усиления, а затем объединяются в цепочке 23 на выходе этих усилителей. В цепочке 23 получают векторный сигнал, являющийся результатом сложения усиленных сигнаЛОБ,.фаза которого меняется, следовательно, в зависимости от разбалансировки коэффициентов усиления усилителей по отношению к опорной фазе.
Фазовый компаратор 14, на который подается, с одной стороны, результирующий сигнал и, с другой стороны, опорный сигнал после их преобразования в прямоугольные сигналы соответственно в схемах преобразования 12 и 13, определяет разность фаз двух сигналов и выдает напряжение с выходов 15 и 16 на тот или другой из усилителей 10 и 11 в зависимости от знака этой разности для изменения их коэффициентов усиления так, чтобы результирующий сигнал совпадал по фазе с опорным сигналом. При этом сравнение фаз сигналов осуществляется в цифровой форме, и операция согласования по фазе осуществляется сравнительно медленно из-за того, что автоматическая регулировка коэффициента усиления усилителей 11 и 12 имеет большое время срабатывания.
Таким образом,система не может сразу реагировать на возникновение быстрых рассогласований по фазе, вызываемых появлением металлической массы или транспортного средства в магнитном поле излучающей обмотки, вследствие чего на одном из выходов 17 или 18 фазового компаратора 14 появляется напряжение, указывающее на присутствие остановившегося транспортцого средства в непосредственной близости от датчика, если это напряжение присутствует постоянно, или на наличие движущегося транспортного средства, если это напряжение имеет вид импульса. Выход, на котором появляется напряжение, указывает на положение транспортного средства относительно оси датчика или на направлеиие его перемещения.
Обычно датчик размещается под дорожным полотном вдоль оси контролируемой дороги, а его сравнительно
ебольшие размеры, составляющие в
лину приблизительно 1 м, делают
его применение достаточно простым.
н может быть установлен также на
краю дорожного полотна без искаже,ния выдаваемой им информации,Формула изобретения
1. Электромагнитный датчик, чувствительный к изменению магнитного поля, которое он создает, содержащий, . по меньшей мере, одну излучающую об- мотку, две приемные обмотки и блок обработки данных, отли чающийс я тем, что, с целью уменьшения его габаритов и повышения чувствительности, приемные обмотки, коэффи- 15 циент связи между которыми, по крайней мере, на порядок выше коэффициента их связи с излучающей обмоткой, расположены по обеим сторонам оси излучающей обмотки,причем их общая 20 ось перпендикулярна оси излучающей обмотки.
2,Электромагнитный датчик по
п. 1, отличающийся тем, что излучающая и приемные обмотки ра положены на ферромагнитной пластине, а вокруг приемных обмоток .расположен электростатический экран.
3.Электромагнитный датчик по пп. 1и2, отличающийся тем, что каждая приемная обмотка подключена к первому входу соответствующего усилителя, вторые входы которых связаны соответственно с первым и вторым выходами фазового компаратора. Один ВХОД котор.ого соединен через первый преобразователь
с излучсиощей обмоткой, другой вход через второй преобразователь - с выходами усилителей, а третий и четвертый выходы через логические блоки связаны с блоком обработки данных.
Источники информации, принятые во внимание при экспертизе
1. Патент США № 3,911,389, кл. 340/38 L, 1975.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОЙ ПРОВОДИМОСТИ ЖИДКИХ СРЕД | 1996 |
|
RU2105969C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Широтно-импульсный N-фазный инвертор | 1989 |
|
SU1815776A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Преобразователь для систем автомати-чЕСКОгО упРАВлЕНия плОТНОСТью TOKA ВгАльВАНичЕСКиХ BAHHAX | 1979 |
|
SU846612A1 |
| ИНДУКТИВНЫЙ ФАЗОВЫЙ ДАТЧИК ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2079842C1 |
| Генераторное устройство для геоэлектроразведки | 1984 |
|
SU1233075A1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО КОНТРОЛЯ ИСПРАВНОСТИ ЭЛЕКТРОТЕХНИЧЕСКИХ ОБЪЕКТОВ ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2617731C2 |
| СПОСОБ ВЫЯВЛЕНИЯ ОТРАЖЕННОГО СИГНАЛА ОТ МИШЕНИ В ИНДУКЦИОННОМ РЕЗОНАНСНОМ МЕТАЛЛОИСКАТЕЛЕ, ПРИ НАЛИЧИИ ВЛИЯНИЯ ДЕСТАБИЛИЗИРУЮЩИХ ФАКТОРОВ, В ПРОЦЕССЕ ПОИСКА И ОБНАРУЖЕНИЯ ЕЕ, УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2022 |
|
RU2817670C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЙ В ГЕОЛОГОРАЗВЕДКЕ | 1993 |
|
RU2087927C1 |

УШ
I .
jfe
J
Л-с-к
Фиг.2
