гидрогенератора. Различие в скоростях .набора мощности при выставлении режимов может приводить к перегрузкам ЛЭП и нарушению синхронизма и, как следствие, к затягиванию этого процесса, так как в моделируемой схеме может быть Несколько гидрогенераторов. Это налагает жесткие требования на скорость набора мощности, вынуждая экспериментатора изменять мощности генераторов путем малых изменений уставок моделей регуляторов скорости. Значительную трудность вызывает необходимость многократного воспроизведения одного и того же режима из-за сильного влияния отклонения ча тоты на мощности генераторов (изменение частоты на 5% вызывает изменение мощности генераторов на 100%). Кроме того, при проведении экспериме тов на ЭДМ перед набором мощности генераторов часто возникает необходимость в восстановлении синхронной работы генераторов после предшествую щего эксперимента. Иногда при благо приятных условиях система ресинхрони зируется без вмешательства оператора Но чаще необходимо уставки моделей регуляторов скорости изменять так, чтобы мощности, вырабатываекые генер торами, обеспечивали отсутствие пере токов по основным ЛЭП, или разделять схему на узлы с. последующей их синхронизацией, или подключать к схеме, набранной на ЭДМ, источник большой мощности. Все.это также существенно затягивает врекИ между экспериментами, которое иногда достигает нескольких минут. Исследования на ЭДМ состоят из сотен и тысяч опытов, например, отыскание границ областей динаи шческой устойчивости, что приводит к затягиванию исследований, причем практически не сокращаемому, с увеличением персонала, воздействующего одновременно н регуляторы генераторов модели. Известны способы управления мощностью генераторов, которые заключаются в дистанционном изменении уставок модели регулятора скорости и мод ли турбин, осуществляемые оператором от устройств, работающих по .жесткой временной программе, которые не снимают указанных трудностей 1 . Наиболее близок к предлагаемому по т,е нической сущности способ управ ления мощностью синхронного генератора .электродинамической модели, в котощом для изменения мощности генератора ЭДМ в стационарном режиме изменяют вручную уставку модели регуля торе скорости, а при нарушении синхронной работы генератора воздейству ют на усилитель мощности модели турбины с помощью автоматического устройства для ресинхронизации генера-тора. Воздействие на усилитель мощно ти модели турбины вырабатывгиот по отклонению скорости генератора от синхронной, не изменяя при этом уставку модели регулятора скорости. После ресинхронизации воздействие на усилитель мощности модели турбины снимают Г2 . Недостатком известного спос.оба является то, что он не обеспечивает быстрого набора требуемой мощности генератора ЭДМ при переходе от некоторого исходного режима так как при ручном изменении уставки модели регулятора скорости процесс изменения мощности генератора занимает длительное время (например, для гидрогенераторов 1,5-2 мин), что приводит к существенному затягиванию процесса набора мощностей нескольких параллельно работающих генераторов, включенных в систему, набранную на электродинамической модели, из-за их взаимного влияния. Известное устройство управления мощностью ЭДМ содержит источник задающего напряжения, блок управления, подключенный к модели регулятора скорости, блок управления моментом модели турбины, подключенный к усилителф мощности 2J , Однако это устройство является сложным, хотя обеспечивает только ресинхронизацию. При использовании устройства для демпфирЬвания качаний генератора при незначительном отклонении его частоты от номинал.ьной (0,2%) снятие сигнала вызывает дополнительное возмущение мощности генератора, так как выходной сигнал устройства в этот момент не равен нулю. Цель изобретения - ускорение процесса набора требующейся мощности генератора как в стационарном режиме, так и после нарушения синхронной устойчивости, повышение точности поддержания величины мощности и успокоение колебаний мощности генератора при подготовке экспериментального режима электродинамической модели. Поставленная цель достигается тем, что в способе управления мощностью синхронного генератора злектродинамической модели путем изменения уставки модели регулятора скорости и управления моментом модели турбины измеряют отклонение момента модели турбины от заданного значения и изменяют уставку модели регулятора скорости в зависимости от измеренного отклонения, кроме того, измеряют отклонение частоты генератора от номинальног о значения и управляют моментом модели турбины в зависимости от измеренного отклонения, при этом изменение уставки и управление моментом модели турбины осуществляют одновременно, а непосредственно перед проведением эксперимента на электродинамической модели величины измене ния уставки и сигнала управления моментом турбины фиксируют. Кроме того, предлагаемое устройство снабжено датчиком момента моде ли турбины, датчиком частоты генера тора, блоком задания режимов работы блоков управления уставкой и момен;гоммодели турбины, при этом блок управления уставкой состоит из двух операционных усилителей с двухсторонними симметричными ограничителям входного сигнала, резисторов, конде саторов и управляемых ключей, приче к инвертирующему входу первого опера ционного усилителя через резисторы подсоединены источник задакяцего напряжения, датчик момента модели турбины, и выход первого операционного усилителя. К инвертирующему входу второго операционного усилителя подсоединены выход первого операционного усилителя через цепь, содержащую параллельно включенные резистор и резистор с последовательно включенны конденсатором и первый управляемый ключ, выход второго операционного усилителя через конденсатор с параллельно включенным рторым управляемым ключом, причем управляющие входы ключей подключены к первому выходу блока задания режимов работы, блок управления моментом модели турбины состоит из операционного усилителя, двухстороннего симметричного ограничителя, конденсатора, параллельно соединенных уйравляемых ключей, при этом.инвертирующий вход операционного усилителя через резистор, двухсто ронний симметричный ограничитель с параллельно подключенным конденсато ром и через параллельно соединенные ключи подсоединен к датчику частоты генератор, а управляющие входы ключей подсоединены ко второму выходу блока задания режимов работы. На фиг. 1 представлена функционал ная блок-схема устройства, реализующего предлагаемый cnoco6j и его привя ка к синхронному генератору модели; на фиг. 2 - схема блока управления уставкой модели регулятора скорости устройства; на фиг. 3 - схема блока заданий режимов работы блока управления уставкой модели регулятора ско рости, один из вариантов; на фиг. 4 схема блока управления моментом модели турбины устройства; на фиг. 5 схема блока задания режимов работы блока управления моментом модели турбины, один из вариантов; на фиг. 6 и 7 - кривые процессов, пояснякицие работу блока управления устав кой модели регулятора скорости для турбогенератора модели и для гидроге нератора соответственно; на фиг. 8 кривые процессов набора мощности при включении турбогенератора модели на параллельную работу с сетью при отключенном блоке управления моментом модели турбины (а) и при включен ном блоке (б), кривые процессов набора мощности, близкой к пределу статической устойчивости, гидрогенератором модели при работе только блока управления уставкой модели регулятора скорости (в) и при одновременной работе блока управления уставкой модели регулятора скорости и блока управления моментом модели турби-ны (г) . Вместо ручного регулирования ус---, тавки модели регулятора скорости применяется формирование изменения уставки на основании разности между задающим сигналом и сигналом, пропорциональным моменту модели турбины, в этом случае устраняется влияние нестабильности элементов, входящих в канал измерения скорости, например, тахогенератора, а также значительно ускоряете процесс набора мощности, так как сигнал, изменяющий уставку модели регулятора скорости в процессе регулирования, изменяется на значительно большую величину, чем необходимо для изменения уставки регулятора скорости при ручном регулировании. Кроме того, за счет использования такого регулирования уставки модели регулятора скорости турбины удается получить одинаковый характер процесса изменения мощности для агрегатов различных типов (турбог и гидрогенераторов). Следует отметить, что использование для регулирования мощности генератора сигнала, пропорционального моменту его турбины, предпочтительнее, чем использование сигнала, пропорционального электрической мощности генератора, так как последний зависит не только от момента турбины, но и от режима внешней сети. Кроме того, получение сигнала, пропорционального моменту модели турбины, в техническом отношении существенно проще (шунт), чем получение сигнала, пропорционального электрической мощности генератора. Данное регулирование обеспечивает повторяемость экспериментов на ЭДМ. Одновременно с изменением уставки одели регулятора скорости с целью беспечения качественного переходого процесса, изменения мощности енератора и подавления качаний мощости генератора, вызванных налиием других генераторов, при заборе ежимов, близких к границам статичесой устойчивости, осуществляется доюлнительное .управление моментом моели турбины воздействием на усиитель мощности модели турбины. ри этом управляющее воздейстие вырабатывается по отклонению астоты от нсялинального значения. оздействие непосредственно на
Date : 03/05/2001


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделированиязАМиРАНий B РАдиОКАНАлЕ | 1979 |
|
SU842864A2 |
| Генератор случайного напряжения | 1982 |
|
SU1050091A1 |
| Устройство для моделирования синхронного генератора | 1979 |
|
SU877578A1 |
| Устройство для моделирования коротковолнового радиоканала | 1974 |
|
SU532111A1 |
| Устройство для моделирования замираний в радиоканале | 1974 |
|
SU544977A1 |
| Цифровой измеритель параметров случайных процессов с распределением Накагами | 2020 |
|
RU2742695C1 |
| Адаптивная система регулирования | 1978 |
|
SU813356A1 |
| Устройство для моделирования первичного двигателя синхронного генератора | 1973 |
|
SU489122A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ЗАМИРАНИЯ РАДИОКАНАЛА ПО ЗАКОНУ РАЙСА ПО ИНФОРМАЦИОННОМУ МНОГОЧАСТОТНОМУ СИГНАЛУ | 2014 |
|
RU2559734C1 |
| Автоматический регулятор мощности дуговой электропечи | 1984 |
|
SU1197151A1 |
Number of pages : 4
Previous document : SU 842863
Next document : SU 842865 Союз Советских Социалистических Республик Государственный комите СССР по делам нзовретеннй и открытий (72) Авторы А. А. Бердников, А. изобретения и В. 3. (71) Заявитель
(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЗАМИРАНИЙ В РАДИОКАНАЛЕ
1
Изобретение относится к ан логовой вычислительной технике и может быть использовано в целях имитации многолучевого радиоканала при испытаниях различных систем передачи информации.
По основному авт. св. 648997 известно устройство для моделирования замираний в радиоканале, содержащее генератор шума, сумматор, интеграторы, инвертор, блок возведения в куб, а также кваддаатор и блок умножения, при этом выход генератор шума соединен с первым входом сумматора, выход которого подключен к входу первого интегратора, выход которого соединен с вторым входом сумматора и входом второгр интегратора, выход которого подключен к входам инвертора и блока возведения в куб выходы которых соединены с третьим и четвертым соответст-венно входами сумматора, выход блока умножения подключен к соответствующему входу сумматора, один из входов блока умножения присоединен к выход nepBord интегратора, а другой - к выходу квадратора, вход которого соединен с выходом второго интегратора tl
о 842864
{51)М. Кя.
G Об G 7/62 Н 04 В 7/00
(53) УДК 681.335
(088,8)
Указанное устройство моделирует дифференциальное уравнение
iii,«()).
где Р , , у, Э - параметры уравнения) о круговая частота; N о - интенсивность белого
шума.
Узкополосный случёЛный -процесс X(t) на выходе этого устройства при соответствукяцем выборе параметров -j- и fi имеет распределение мгновенных значений вида
cju(x)c(7n9i ехР(рх2-{ / ;. (;
На практике устройс- ва передачи информации по радиоканалам замирания обычно характеризуют распределением огибающей R(t) принятого узкополосного радиосигнала x(t), представляемого в виде
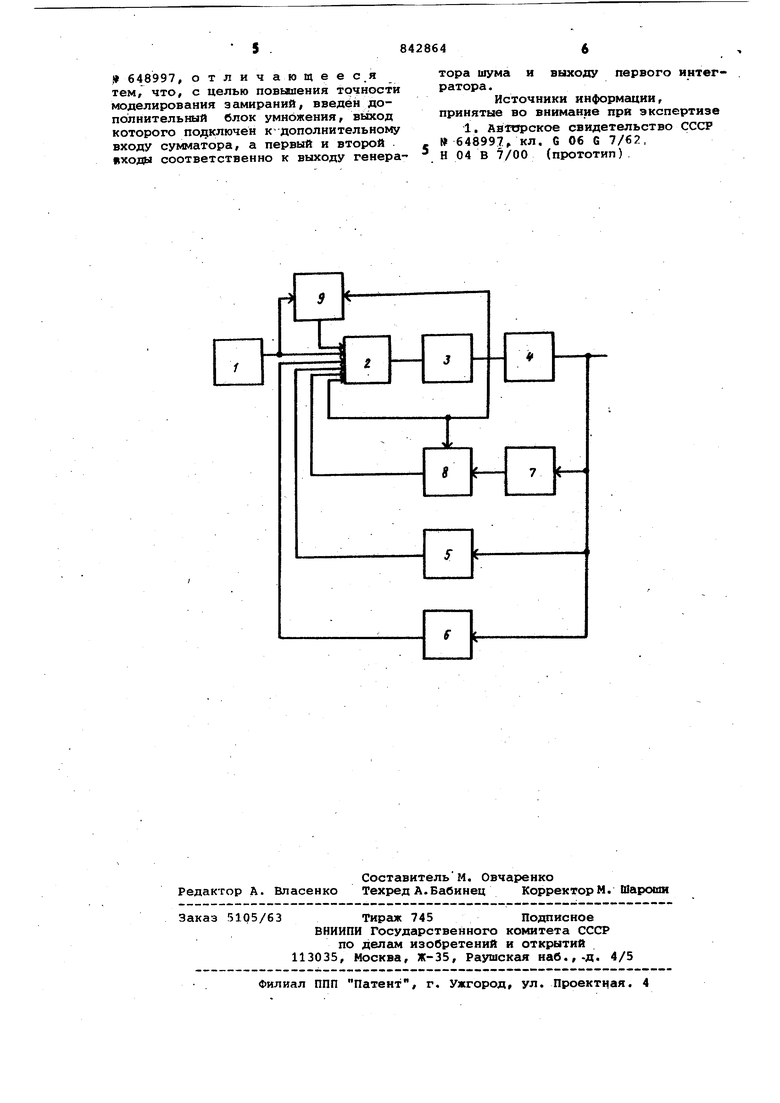
x(t) R(t)cosr4 ot +«f(t)J, гДе R(t)- огибающая радиосигнала; Ч( t) - случгийная фаза, имеющая равнсялерно распределение в интервале (-Т,Т), Однако распределению мгновенных значений (1) соответствует распредеПИСАНИЕЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (61) Дополнительное к авг.свид-ву ) 648997 (22}3аявлено 03J)8J9 (21)2811948/18-09 с присоединением заявки N9 - (23) Приоритет - Опубликовано 30.06.81.Бюллетень № 24 Дата опубликования описания 30.06J31 Ленинградский электротехнический институт связн(. им. проф. М. А. Бонч-Бруевича i Г. Брусенцов, В. Я. Конторский UCECUiOJKAfi Ляндрес -ПАТЕНТНОЛение огибакицей, которое лишь прибл жённо аппроксимирует распределение огибающей реального радиосигнала. Аппроксимация обеспечивает близость распределений в среднем, тогда как при испытанияхсистем передачи информации имеет значение точный хо кривой распределения огибаняцей. Использование при имитации радиоканал узкополосного случайного процесса с распределением огибающей, отличным распределения огибакодей реального радиосигнала, приводит к дополнительной погрешности, что снижает точность, а следовательно, и практи ческую ценностьмоделирования радиоканала на основе известного устройства. Цель изобретения - повышение точ ности моделирования замираний за счет получения узкополосного случай ного процесса с т-распределением огибающей - одним из общепринятых р пределений огибающей, подтвержденных измерениями в реальном радиоканале (распределение Накагами), опис ваемым следующей формулой VCR)con9i-R exp( (а) где - средний квадрат огибающей; m - параметр характеризунвдий глубину замираний. Распределение (2), являясь универсальным, удобно с точки зрения имитации радиоканала, так как, меня лишь параметр тот 0,5 до ел ,можно рег лировать глубину замираний от очень глубоких до нуля, т.е. имитировать радиоканал без замираний. Поставленная цель достигается тем, что в устройство для моделирования замираний в радиоканале, со держащее генератор шума, сумматор, интеграторы, инвертор, блок возведе ния в куб, а также квадратор и блок умножения, при этом выход генератора шума соединен с первым входом сумматора, выход которого подключен к входу первого интегратора, выход которого соединен со вторым входом сумматора и входом второго интегратора, выход которого подключен к вх дам интегратора и блока возведения в куб, выходы которых соединены С третьим и четвертым соответственно входами сумматора, выход блока умножения подключен к соответствующему входу сумматора, один из входов блока умножения присоединен к выходу первого интегратора, а другой выходу квадратора, вход которого со единен с выходом второго интегратора, введен дополнительный блок умно жения, выход которого подключен к дополнительному входу сумматора, а первый и второй входы соответственн к выходу генератора шума и выходу первого интегратора. На чертеже приведено предлагаемое устройство, структурная электрическая схема. Устройство для моделирования замираний в радиоканале содержит генератор 1 шума, сумматор 2, интеграторы 3, 4, инвертор 5, блок 6 возведения в куб, квадратор 7, блок 8 умножения и дополнительный блок 9-умножения . Устройство работает следующим образом. Белый шум с выхода генератора шума 1 подается одновременно на вход сумматора 2 и на первый вход дополнительного блока 9 умножения, второй вход которого соединен с выходом интегратора 3, а выход с соответствующим входом сумматора 2, другие входы последнего соединены с выходом интегратора 3, инвертора 5, блока 6 возведения в куб, блока 8 умножения, в результате чего на выходе сумматора 2 формируется вторая производная процесса x(t), которая после двухкратного интегрирования на последовательно соединенных интеграторах 3 и 4 представляет собой процесс X(t), причем входы блока умножения 8 соединены с выходами интегратора 3 и квадратора 7, вход которого соединен с выходом интегратора 4, т.е. с выходом всего устройства. Устройство моделирует дифференциальное уравнение. « Х-() причем при следующих значениях параметров уравнения Эа|п,.р... огибающая R(t) узкополосного случайного процесса х(t) на выходе устройства имеет т-распределение (2). Регулировка параметров m ий распределения (2) достигается варьированием весовых коэффициентов при суммировании выходных напряжений блоков 8 и 9 умножения и интегратора 3. Предлагаемое устройство значительно повышает точность моделирования замираний при использовании его в качестве базового блока имитатора радиоканала при испытании систем передачи информации, повышает достоверность результатов испытаний, позволяет более точно прогнозировать реальную работоспособность систем. Формула изобретения Устройство для моделирования замираний в радиоканале по авт.св.
t 648997, отличающееся тем, что, с целью повышения точности моделирования замираний, введён дополнительный блок умножения, выход которого подключен к дополнительному входу сумматора, а первый и второй «ходы соответственно к выходу генератора шума и выходу первого интегратора.
Источники информации, принятые во внимание при экспертизе
