(54)ЭКСКАВАТОРНЫЙ РАБОЧИЙ ОРГАН ПРОХОДЧЕСКОГО
1
Изобретение относится к горной промышленности, преимущественно к тоннелестроению, и касается проходческих щитов с экскаваторным рабочим органом.
Известен экскаваторный рабочий орган проходческого щита, включающий поворотную стрелу и выдвижную рукоять с поворотным скребком,размещенную внутри стрелы. Это устройство перемещаясь с помощью гидроцилиндров в.плане и профиле, разрабатывает грунт по всему забою и производит погрузку этого грунта в средства внутритоннельного транспорта {.
Недостатком этого экскаваторного рабочего органа является невозможность вращения выдвижной рукояти вокруг продольной оси стрелы, что снижает маневренность рабочего органа при подкопке валунов, погрузке породы и разработке пород в ячейках между горизонтальными перегородками в ножевой части щита при проходке в ЩИТА
.песчаных породах,кроме того,не обеспечивается точное оконтуривание забоя у ножевой кромки щита, имекщего, как правило, круглую форму.
Наиболее близким к прЬдлагаемому по технической сущности и достигаемому эффекту является экскаваторный рабочий орган проходческого щита, содержапдай стрелу, шарнирно связанную с корпусом щита с возможностью
10 горизонтального и вертикального поворота, рукоять, установленную в корпусе стрелы посредством двух опорных элементов с возможностью осевого перемещения, скрёбок, шарнирно закреп15ленный на конце рукояти и связанный с рукоятью посредством гидродомкрата, и жестко закрепленный на корпусе стрелы привод вра1чения рукояти, выходная ступень которого соосна рукояти 2.
30
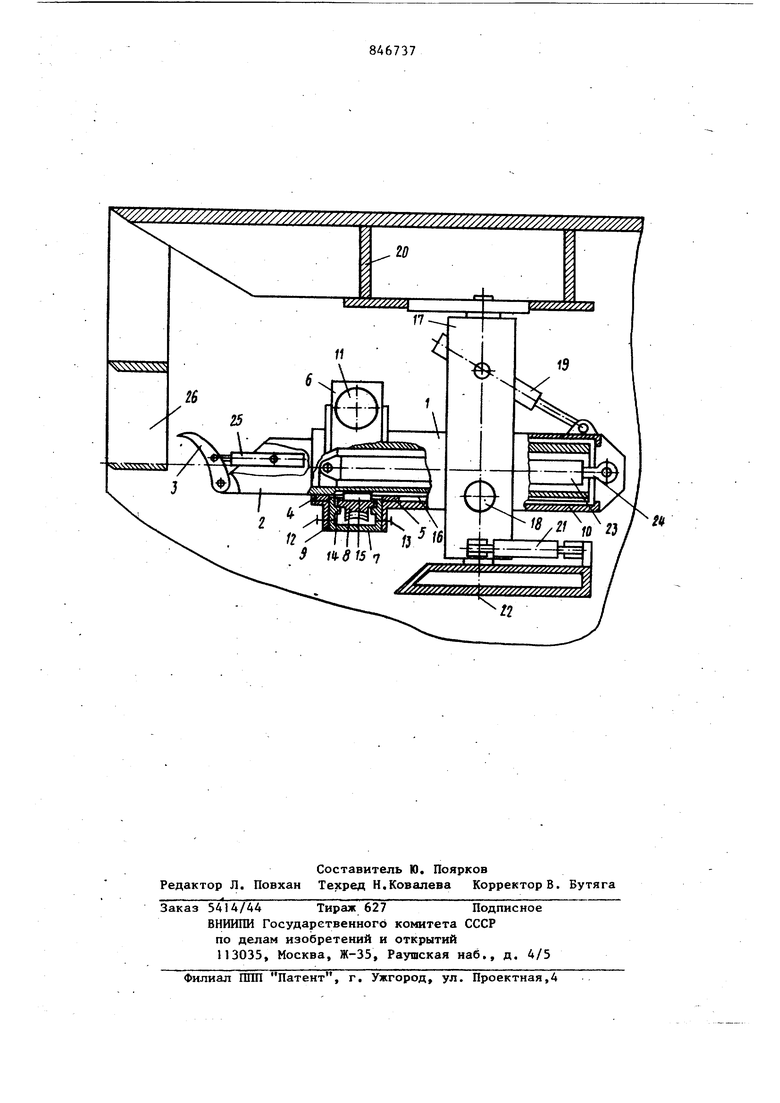
Недостатком данного рабочего органа является то, что опорные элементы, рукояти выполнены по сложной двухступенчатой схеме: рукоять опирается на внутреннюю поверхность полой трубы, связанной с выходной ступенью привода, а полая труба, в свою очередь, на внутреннюю поверхность стрелы, при этом корпус привода вращения расположен сзади рукояти, вне ее опорной зоны, определяемой по длине пространством между местами опирания рукояти внутри выходной ступени, а выходная ступень привода выходит за пределы ко пуса и имеет значительную длину, которая обуславливается величиной перемещения рукояти вдоль ее продол ной оси и выбранной конструктивно базой между опорными элементами рук ти. Это приводит к усложнению рабо чего органа в целом, к увеличению е габаритов и вследствие этого к сниж нию маневренности рабочего органа в условиях стеснённого пространства. внутри проходческого щита. Цель изобретения - повышение маневренности экскаваторного рабочего органа путем сокращения его габари- тов. . Указанная цель достигается тем, что рукоять размещена внутри выходной ступени привода вращения, которая установлена между опорными элементами . Кроме того, рукоять выполнена с продольным пазом, а выходная ступень привода имеет жестко закреплен ную внутри нее шпонку, взаимодействующую с продольным пазом. На чертеже показан экскваторный рабочий орган проходческого щита, вид сбоку. Экскваторный рабочий орган проходческого щита включает поворотную стрелу с рукоятью 2, на конце которой закреплен поворотный скр бок 3. Рукоять 2 установлена в опор ных элементах подшипниках)4 и 5 внутри корпуса стрелы 1 с возможностью вращения и продольного осево го перемещения. Стрела 1 снабжена приводом 6 вращения; причем корпус 7 привода вмонтирован в корпус стре ль1 I , а выходная ступень 8 привода соединена с рукоятью 2 и охватывает ее по периметру. Корпус стрелы 1 состоит из трех жестко связанных между собой секций: средней, предст ляющей собой корпус 7 привода 6 вращения рукояти 2 и крайних 9 и 10 в которых монтированы соответственн опорные элементы (подшипники)4 и 5 374 рукояти 2, расположенные непосредственно между рукоятью 2 и корпусом стрелы 1, при этом выходная ступень 8 привода 6 вращения расположена внутри его корпуса 7 и между опор1й11ми элементами (подшипниками и 5 рукояти 2. Привод 6 вращения представляет собой заранее собранный и отрегулированный редуктор, например червячный. с приводом червяка (на чертеже не показан)от гидромотора П. Крайние секции 9 и 10 крепятся к корпусу 7 привода 6 вращения при помощи болтовых соединений 12 и 13. Выходная ступень 8 установлена внутри корпуса 7 в опорах 14, а закрепленная в ее ступице шпонка 15 входит в шпоночный паз 16, выполненный на наружной поверхности рукояти 2 по всей ее длине параллельно продольной оси рукояти. Рукоять 2 проходит через полую ступицу выходной ступени 8 с гарантированным зазором, исключающим случайное воздействие на выходную ступень-|8 радиальных нагрузок от рукояти 2. Стрела I монтирована в кронщтейне 17 с помощью цапф 18. геометрическая ось которых перпен- . дикулярна продольной оси стрелы, и гидроцилиндра 19, шток которого шарнирно закреплен на секции 10 стрелы 1, а корпус в кронштейне 17. Кронштейн 17 устанавливается, в свою очередь, в корпусе 20 проходческого щита с возможностью поворота при помощи гвдроцилиндра 21 вокруг вертикальной оси 29. Внутри стрелы 1 соосно с ней установлен гидроцилиндр 23 перемещения рукояти 2. Шток 24 гвдроцилиндра 23 шарнирно закреплен на неподвижной секции 10 корпуса стрелы 1, а его корпус на выдвижной рукояти 2. Подвод рабочей жидкости в гидроцилиндр 23 производится через каналы (на чертеже не показаны) в штоке 24. Для поворота скребка 3 на переднем конце рукояти 2 шарнирно монтирован гидроцилиндр 25. В ножевой части корпуса 20 проходческого щита устанавливается съемная система 26 горизонтальных и вертикальных перегородок. Экскаваторный рабочий орган проходческого щита работает следуюпщм образом. Вначале стрела 1 с рукоятью2 и скребками 3 ориентируется в пространстве для разработки заданного участка забоя, а затем скребок 3, 5 пoвopaчивae ый гидроцилиндром 25, производит разработку грунта. Поворот стрелы 1 в вертикальной плоскости относительно оси цафп 18 производится с помощью гидроцлиндра 19 а в горизонтальной плоскости относи тельно оси 22 с помощью гидроцилинд ра 21. Перемещение рукояти 2 со скребком 3 вдоль ее продольной оси производится с помощью гидроцилиндр 23, при этом рукоять 2 на протяжении всего своего хода опирается на опорные элементы подшипники 4 и 5 а ее шпоночный паз 16 скользит вдол боковых граней шпонки 15, удерживая рукоять 2 со скребком 3 от проворачивания под действием реактивных си грунта. Опорные элементы подшипники 4 и 5 передают реактивные нагрузки от сил резания на стрелу 1, которая удерживается в заданном положении гидроцилиндрами 19 и 21. При необхо димости ориентации скребка 3 в плос кости вращения рукояти 2 включают гидромотор 11 привода 6 вращения, п этом выходная ступень 8 через шпонк 15 и шпЬночный паз 16 вращает рукоя 2 со скребком 3 на заданный угол. Вращение и выдвижение рукояти 2 про изводят, как правило, поочередно,при этом корпус гидроцилиндра 23 соответственно вращается или вьщвигается относительно своего неподвижно закрепленного штока 24. Возможная несоосность рукояти 2 и гидроцилиндра 23 компенсируется за счет шарнирного подсоединения корпуса гидроцшшндра 23 и его штока 24 соответственно к выдвижной рукояти 2 и секции 10 стрелы 1. Разработка грунта в забое производится путем поочередного обхода рукоятью 2 со скребком 3 всей площади забоя. Разработанный грунт падает вниз и подогревается на устанавливаемый в лотке щита продольный транспортер или иное сред- ство внутритоннельного транспорта При проходке в песчаном грунте а коицевой части щита обычно устанавливается съемная система 26 горизонтальных и вертикальньпс перегородок и разработка грунта в образуемых перегородками ячейках ведется путем последовательного введения рукояти 2 со скребком 3 в ячейки меж ду перегородками. Предлагаемое конструктивное выполнение экскаваторного рабочего 37 органа позволяет упростить конструкцию рукояти, уменьшив при это-массу в 1,5-2 раза за счет значительного сокращения длины выходной ступени привода вращения,а также ( применительно к проходческим щитам 4-6 к) на 15-20% сократить габариты стрелы на величину, соответствующую габаритам привода, за счет размещения привода вращения между опорными элементами (подшипниками)рукояти, что приводит к общему уменьшению массы экскаваторного рабочего органа на 20-25%. Кроме того, достижение технического эффекта обеспечивается за счет повьш1ения маневренности и следовательно, про изводительности экскаваторного рабочего органа и всего щита в целом, особенно при работе экскаваторного органа в стесненных условиях, когда в ножевой части щита устанавливается система горизонтальных и вертикальных перегородок, например для работы щита в песчаном грунте. Фодмула изобретения 1.-Экскаваторный рабочий орган проходческого щита, содержащий стрелу, шарнирно связаннук с корпусом щита с возможностью горизонтального и вертикального поворота, рукоять, установленную в корпусе стрелы посредством двух опорных элементов с возможностью осевого перемещения, скребок, шарнирно закрепленный на кянце рукояти и связанный с рукоятью посредством гидродомкрата, и жестко закрепленный на корпусе стрелы привод вращения рукояти, выходная ступень которого соосна рукояти, о т л ичающийся тем, что, с целью повьш1ения маневренности рабочего органа путем сокращения его габаритов, рукоять размещена внутри выходной ступени привода вращения, которая установлена между опорными элементами. 2. Экскаваторный орган по п.1, отличающийся тем, что рукоять выполнена с продольным пазом, а выходная ступень привода имеет жестко закрепленную внутри нее шпонку, взаимодействующую с продольным пазом. Источники информации, принятые во внимание при экспертизе 1.Патент США 4026604, кл. 299-64, опублик. 1977. 2.Патент Швейцарии № 471944, кл. Е 02 F 3/28, опублик. 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Экскаваторный рабочий орган проходческого щита | 1983 |
|
SU1134722A1 |
| Экскаваторный рабочий орган проходческого щита | 1984 |
|
SU1218124A2 |
| Экскаваторный рабочий орган проходческого щита | 1988 |
|
SU1566032A1 |
| Щит для проходки горных выработок | 1982 |
|
SU1051293A1 |
| Экскаваторный рабочий орган проходческого щита | 1988 |
|
SU1671867A1 |
| ПРОХОДЧЕСКИЙ ЩИТ | 1992 |
|
RU2034153C1 |
| Проходческий щит | 1990 |
|
SU1731953A1 |
| Щит для проходки тоннелей | 1980 |
|
SU912943A1 |
| Проходческий щит | 1984 |
|
SU1361332A1 |
| Проходческий щит | 1987 |
|
SU1550158A1 |