(54) ЭЛЕКТРОМАГНИТНЫЙ ДЕМПФЕР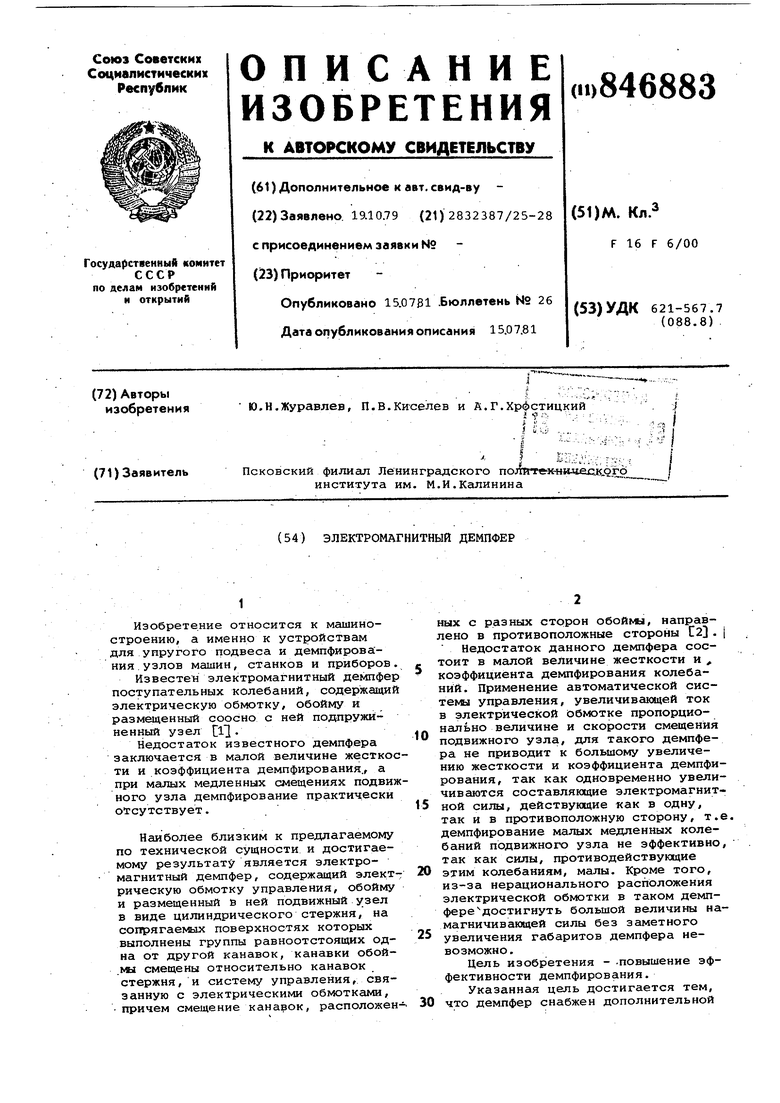
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный демпфер | 1975 |
|
SU589480A1 |
| Магнитная опора | 1981 |
|
SU1028714A1 |
| ДЕМПФЕР ДЛЯ ЭЛЕКТРОМЕХАНИЧЕСКИХ УСТРОЙСТВ ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2193122C2 |
| ПОЛУАКТИВНЫЙ ДЕМПФЕР КОЛЕБАНИЙ, ДЕМПФИРУЮЩАЯ СИСТЕМА И ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2794318C1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| СИСТЕМА РЕМЕННОГО ПРИВОДА ВСПОМОГАТЕЛЬНЫХ МЕХАНИЗМОВ И МОТОР/ГЕНЕРАТОРА | 2001 |
|
RU2265763C2 |
| СИСТЕМА ПРИВОДА ВСПОМОГАТЕЛЬНЫХ МЕХАНИЗМОВ, ВКЛЮЧАЮЩАЯ В СЕБЯ МОТОР-ГЕНЕРАТОР | 2001 |
|
RU2263839C2 |
| СИСТЕМА ПОДВЕСКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, СОДЕРЖАЩАЯ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2009 |
|
RU2448000C2 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| ДЕМПФЕР КОЛЕБАНИЙ С АКТИВНЫМ УПРАВЛЕНИЕМ, ДЕМПФИРУЮЩАЯ СИСТЕМА И ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2787736C1 |
1
Изобретение относится к машиностроению, а именно к устройствам для упругого подвеса и демпфирования.узлов машин, станков и приборов.
Известен электромагнитный демпфер поступательных колебаний, содержащий электрическую обмотку, обойму и размещенный соосно с ней подпружиненный узел Cll
Недостаток известного демпфера заключается в малой величине жесткости и коэффициента демпфирования., а при малых медленных смещениях подвижного узла демпфирование практически отсутствует.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является электромагнитный демпфер, содержащий электрическую обмотку управления, обойму и размещенный в ней подвижный узел в виде цилиндрического стержня, на сопрягаемых поверхностях которых выполнены группы равноотстоящих одна от другой канавок, канавки обоймы смещены относительно канавок стержня, и систему управления, связанную с электрическими обмотками, причем смещение канавок, расположен-
ных с разных сторон обойма, направлено в противоположные стороны С2.|
Недостаток данного демпфера состоит в мсшой величине жесткости и , коэффициента демпфирования колебаний. Применение автоматической системы управления, увеличивающей ток в электрической йбмотке пропорционально величине и скорости смещения
10 подвижного узла, для такого демпфера не приводит к большому увеличению жесткости и коэффициента демпфирования, так как одновременно увеличиваются составляющие электромагнит15ной силы, действующие как в одну, так и в противоположную сторону, т.е. демпфирование малых медленных колебаний подвижного узла не эффективно, так как силы, противодействующие
20 этим колебаниям, малы. Кроме того, из-за нерационального расположения электрической обмотки в таком демпфере достигнуть большой величины намагничивающей силы без заметного
25 увеличения габаритов демпфера невозможно.
Цель изобретения - -повышение эффективности демпфирования.
Указанная цель достигается тем, 30 что демпфер снабжен дополнительной
бмоткой, имеющей обойму и располоенной соосно основной, каждая из бойм выполнена в виде пучка стержей, равномерно расположенных по кружности, на стержне выполнена опол.нительная, аналогичная основной, группа канавок, входящая в ополнительную обойму, и встречно смещенная относительно канавок основной обоймы.
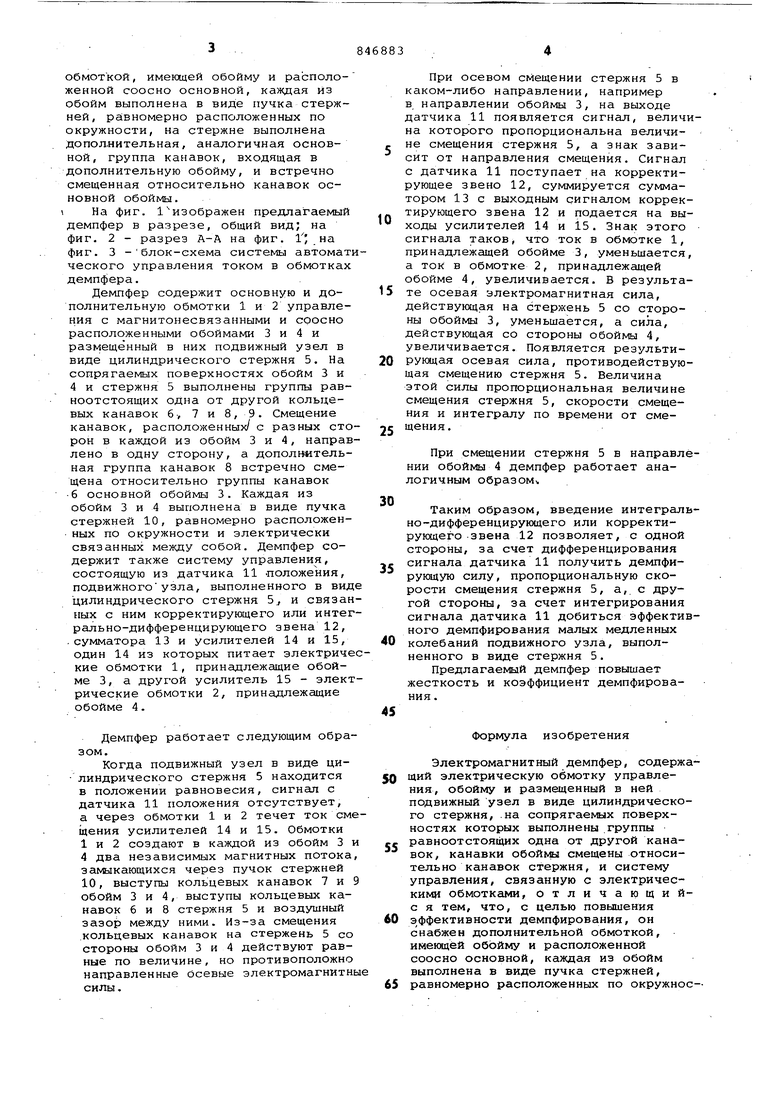
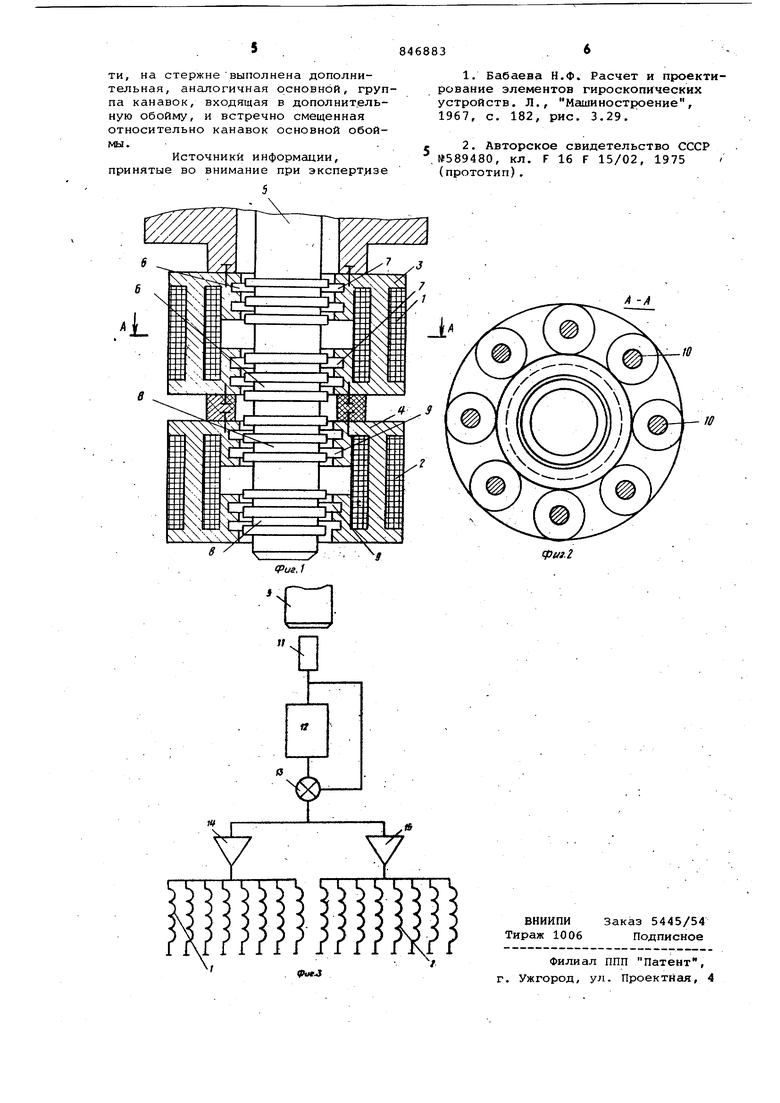
На фиг. 1изображен предлагаемый емпфер в разрезе, общий вид; на фиг. 2 - разрез А-А на фиг. If на фиг. 3 -блок-схема системы автоматического управления током в обмотках емпфера.
Демпфер содержит основную и дополнительную обмотки 1 и 2 управления с магнитонесвязанными и соосно расположенными обоймами 3 и 4 и размещенный в них подвижный узел в виде цилиндрического стержня 5. На сопрягаемых поверхностях обойм 3 и 4 и стержня 5 выполнены группы равноотстоящих одна от другой кольцевых канавок б-, 7 и 8,9. Смещение канавок, расположенных/ с разных сторон в каждой из обойм 3 и 4, направлено в одну сторону, а дополнительная группа канавок 8 встречно смещена относительно группы канавок 6 основной обоймы 3. Каждая из обойм 3 и 4 выполнена в виде пучка стержней 10, равномерно расположенных по окружности и электрически связанных между собой. Демпфер содержит также систему управления, состоящую из датчика 11 -положения, подвижногоузла, выполненного в виде цилиндрического стержня 5 и связанных с ним корректирующего или интегрально-дифференцирующего звена 12, сумматора 13 и усилителей 14 и 15, один 14 из которых питает электрические обмотки 1, принадлежащие обойме 3, а другой усилитель 15 - электрические обмотки 2, принадлежащие обойме 4.
Демпфер работает следующим образом.
Когда подвижный узел в виде ци линдрического стержня 5 находится в положении равновесия, сигнал с датчика 11 положения отсутствует, а через обмотки 1 и 2 течет ток смещения усилителей 14 и 15. Обмотки 1 и 2 создают в каждой из обойм 3 и 4 два независимых магнитных потока, замыкающихся через пучок стержней 10, выступы кольцевых канавок 7 и 9 обойм 3 и 4, выступы кольцевых канавок 6 и 8 стержня 5 и воздушный зазор между ними. Из-за смещения кольцевых канавок на стержень 5 со стороны обойм 3 и 4 действуют равные по величине, но противоположно направленные осевые электромагнитные силы.
При осевом смещении стержня 5 в каком-либо направлении, например в. направлении обоймы 3, на выходе датчика 11 появляется сигнал, велична которого пропорциональна величине смещения стержня 5, а знак зависит от направления смещения. Сигнал с датчика 11 поступает на корректирующее звено 12, суммируется сумматором 13 с выходным сигналом корректирующего звена 12 и подается на выходы усилителей 14 и 15. Знак этого сигнала таков, что ток в обмотке 1, принадлежащей обойме 3, уменьшается а ток в обмотке 2, принадлежащей обойме 4, увеличивается. В результате осевая электромагнитная сила, действующая на стержень 5 со стороны обоймы 3, уменьшается, а сила, действующая со стороны обоймы 4, увеличивается. Появляется результиругадая осевая сила, противодействующая смещению стержня 5. Величина этой силы пропорциональная величине смещения стержня 5, скорости смещения и интегралу по времени от смещения .
При смещении стержня 5 в направлнии обоймы 4 демпфер работает аналогичным образом
Таким образом, введение интегрално-дифференцирующего или корректирующего -звена 12 позволяет, с одной стороны, за счет дифференцирования сигнала датчика 11 получить демпфируклцую силу, пропорциональную скорости смещения стержня 5, а, с другой стороны, за счет интегрирования сигнала датчика 11 добиться эффектиного демпфирования малых медленных колебаний подвижного узла, выполненного в виде стержня 5.
Предлагаемый демпфер повышает жесткость и коэффициент демпфирования .
Формула изобретения
Электромагнитный демпфер, содержащий электрическую обмотку управления, обойму и размещенный в ней подвижный узел в виде цилиндрического стержня, .на сопрягаемых поверхностях которых выполнены группы равноотстоящих одна от другой канавок, канавки обоймы смещены относительно канавок стержня, и систему управления, связанную с электрическими обмотками, отличающийс я тем, что, с целью повышения
0 э ффективности демпфирования, он снабжен дополнительной обмоткой, имеющей обойму и расположенной соосно основной, каждая из обойм выполнена в виде пучка стержней,
5 равномерно расположенных по окружное-
