Предлагаемый гироскопический стабилизатор (гиростабилизатор) относится к гироскопическим приборам и может быть использован в качестве исполнительного органа систем управления космических аппаратов. Известны гиростабилизаторы, применяемые для той же цели. Они обладают как свойством пассивной стабилизации (т.е. способностью противодействовать вращению стабилизируемой платформы), так и способностью создавать управляющие моменты по выходной оси за счет управляемого поворота внешней рамки карданова подвеса, что является их достоинством. Недостатком гиростабилизаторов данного типа является сложность их конструкции, обусловленная наличием двухосного карданова подвеса, и относящихся к нему узлов: подлинники, токоподводы и т.п.
Известны двухстепенные гиростабализаторы, состоящие из силового гироскопа, одноосного карданова подвеса и привода вращения рамки, в том числе с магнитным подвесом ротора двигателя.
Предложен гиростабилизатор, который обладает свойствами стабилизации и управления. Недостаток этого устройства заключается в сложности его конструкции, обусловленной наличием поплавковой камеры, которая, в свою очередь, помещена в корпус с цилиндрической полостью, заполненной жидкостью. При небольших размерах, свойственных индикаторным устройствам, такая конструкция реализуема и широко применяется на практике. Однако при больших размерах силового гироскопа, например, с кинетическими моментами (1000-1500) H·м·с, поплавковая конструкция становится чрезмерно громоздкой, крупногабаритной и практически неприемлемой.
Предлагаются гиростабилизаторы с демпфером, установленным по оси карданова подвеса. Это в значительной мере устраняет отмеченные недостатки. Данные устройства отличаются по исполнению привода вращения рамки.
Предложены двухстепенные гиростабилизаторы с моментным датчиком, установленным по входной оси. Относительно выходной оси формируется управляющий момент
(при неподвижном основании),
где Н - кинетический момент,
 - скорость поворота гироскопа относительно входной оси. Величина
- скорость поворота гироскопа относительно входной оси. Величина  приближенно определяется разностью моментов, действующих относительно входной оси: Mвх=Мдm-Мmp,
приближенно определяется разностью моментов, действующих относительно входной оси: Mвх=Мдm-Мmp,
где Мдm=К Δϕ - момент на выходе датчика момента,
Мmp - момент трения по входной оси,
Δϕ - ошибка стабилизации,
K - коэффициент пропорциональности.
Из приведенных соотношений видно, что момент трения по входной оси гиростабилизатора вызывает ошибку стабилизации Δϕ≅Мmp/К.
Гиростабилизатор с моментным датчиком обладает положительным свойством пассивной стабилизации положения платформы, на которой установлен.
Это свойство обусловлено тем, что при Мдm=0 гироскоп не стеснен относительно входной оси ничем, кроме трения и может прецессировать. При вращении платформы относительно выходной оси гиростабилизатора создается гироскопический момент, препятствующий этому вращению. Следовательно, положение платформы стабилизируется без участия сигнала ошибки управления, т.е. пассивно, это приводит к повышению точности стабилизации, но и в данном случае момент трения играет вредную роль, так как при малых скоростях вращения платформы препятствует движению гироскопа и тем самым ухудшает возможности пассивной стабилизации.
Так как величину момента трения в силовых гиростабилизаторах практически невозможно сделать пренебрежимо малой, то указанная критичность к моменту трения по входной оси некоторых стабилизаторов и является их существенным недостатком.
Гиростабилизатор с магнитным подвесом ротора гироскопа имеет улучшения, касающиеся самого двигателя в части увеличения его долговечности и повышения скорости. Что касается привода вращения рамки, то в этом гиростабилизаторе отсутствуют какие-либо предложения по использованию свойств магнитного подвеса для улучшения характеристик привода вращения рамки, из чего можно заключить, что гиростабилизатор с магнитным подвесом обладает теми же недостатками в части характеристик стабилизации и регулирования управляющего момента.
Наиболее близким к предлагаемому устройству по технической сущности является гиростабилизатор, который и выбран в качестве прототипа.
В состав этого гиростабилизатора введен датчик скорости поворота гироскопа относительно входной оси и регулятор скорости, что устраняет критичность гиростабилизатора к моменту трения по входной оси и вместе с тем сохраняет свойство пассивной стабилизации. Однако прототип имеет и существенный недостаток: ограниченный сверху и снизу диапазон скорости  вращения рамки подвеса, а, следовательно, и выходного момента
вращения рамки подвеса, а, следовательно, и выходного момента  Ограничение скорости снизу обусловлено порогом чувствительности датчика скорости. Для современных датчиков этот порог находится обычно выше 0,1 об./мин, то есть 0,6 об/с, тогда как диапазон изменения скорости вращения рамки подвеса в точных системах стабилизации должен быть, например, (0,0003-3) об/с.
Ограничение скорости снизу обусловлено порогом чувствительности датчика скорости. Для современных датчиков этот порог находится обычно выше 0,1 об./мин, то есть 0,6 об/с, тогда как диапазон изменения скорости вращения рамки подвеса в точных системах стабилизации должен быть, например, (0,0003-3) об/с.
Ограничение сверху обусловлено ограниченными возможностями датчика момента. Например, если переносная скорость вращения силового гироскопа фирмы ″Сперри″ относительно его выходной оси  то при его кинетическом моменте Н=700 Н·м·с датчик момента должен преодолеть в процессе управления гироскопический момент
то при его кинетическом моменте Н=700 Н·м·с датчик момента должен преодолеть в процессе управления гироскопический момент  Очевидно, что такой момент электромеханическим датчиком момента создать невозможно ввиду относительно больших размеров и большой потребляемой мощности датчика, свойственных тихоходным электрическим машинам. Для преодоления этого недостатка в некоторых случаях предлагается установить после датчика момента механический редуктор и высокоскоростной электродвигатель, что дает возможность формировать большие моменты при малых габаритах привода вращения рамки.
Очевидно, что такой момент электромеханическим датчиком момента создать невозможно ввиду относительно больших размеров и большой потребляемой мощности датчика, свойственных тихоходным электрическим машинам. Для преодоления этого недостатка в некоторых случаях предлагается установить после датчика момента механический редуктор и высокоскоростной электродвигатель, что дает возможность формировать большие моменты при малых габаритах привода вращения рамки.
Однако применение редуктора, порождает существенные недостатки:
1) ухудшение стабилизирующей способности стабилизатора вплоть до ее полной потери;
2) ухудшение характеристик стабилизатора как источника управляющего момента вследствие трения, люфта, уменьшения быстродействия, неравномерности вращения рамки подвеса, обусловленной редуктором.
Первый недостаток вызван моментом самоторможения со стороны выходной оси, присущим редуктору, особенно с большим передаточным числом. В этом случае гироскоп защемлен относительно входной оси и из-за отсутствия возможности прецессировать не создает (если пренебречь переносной скоростью) относительно входной оси момента, препятствующего вращению платформ относительно выходной оси гиростабилизатора.
Вторая группа недостатков очевидна и не требует пояснения. Отметим только, что охват редуктора обратной связью по скорости в незначительной мере компенсирует его недостатки вследствие значительного порога чувствительности датчика скорости, что отмечалось выше.
Целью предлагаемого изобретения является улучшение стабилизирующей способности гиростабилизатора с магнитным подвесом ротора гироскопа, повышения его быстродействия, расширение диапазона регулирования управляющего момента, уменьшение влияния на характеристики гиростабилизатора трения и люфта редуктора.
Под стабилизирующей способностью здесь понимается способность гиростабилизатора создавать при вращении его основания относительно выходной оси, гироскопический момент, препятствующий этому вращению (при нулевой скорости привода вращения рамки). Управляющим моментом называется гироскопический момент относительно выходной оси, возникающий в результате вращения рамки карданова подвеса с помощью электропривода.
Поставленная цель достигнута путем введения обратной связи по гироскопическому моменту, вычисляемому по сигналам, поступающим с электромагнитов и датчиков зазора на вход вычислительного устройства, выходной сигнал которого сравнивается с сигналом управления выходным моментом, а сигналом ошибки задается скорость редукторного привода вращения рамки карданова подвеса.
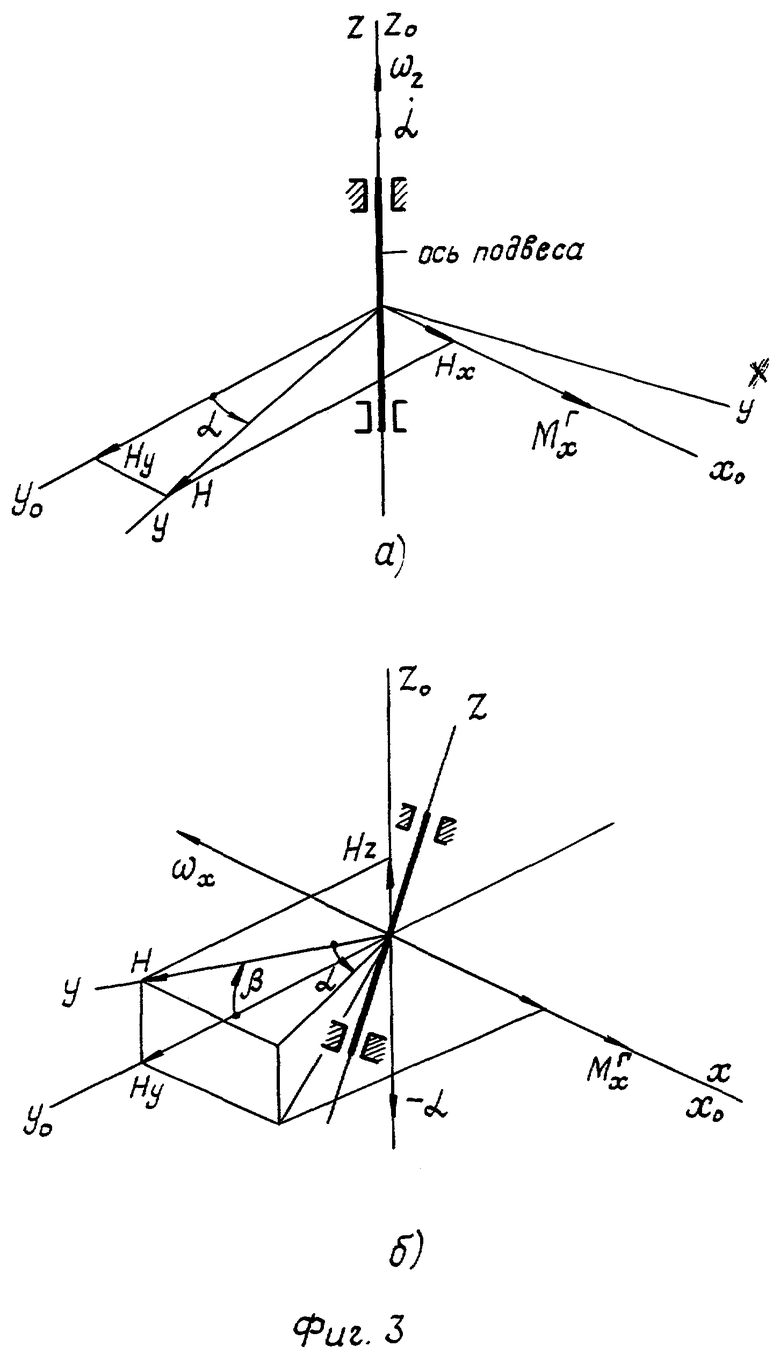
На фиг.1 и 2 изображены функциональные схемы гиростабилизатора (фиг.1) и привода вращения рамки карданова подвеса (фиг.2).
Гиростабилизатор состоит из силового гироскопа 1, расположенного в одноосном кардановом подвесе 2, двух электромагнитных опор, каждая из которых содержат электромагнит 3, датчики зазора 4 и блок радиальной стабилизации 5, привода вращения рамки, в который входят двигатель 6, редуктор 7, блок управления 8, имеющий входы управления моментов 9 и обратной связи 10 с узлом сравнения сигналов 11. Кроме этих устройств в состав гиростабилизатора введены датчики тока электромагнитов 12-15 и вычислительное устройство, состоящее из двух пар блоков вычисления центрирующих сил электромагнитов: 16 и 17, 18 и 19, двух блоков вычисления гироскопических моментов 20, 21 и сумматора 22. На сердечниках электромагнитов 3 размещены обмотки 23 и 24, 25 и 26 электромагнитов 3.
На фиг.1 показаны лишь электромагниты радиальной стабилизации, а электромагниты осевой стабилизации, которые входят в реальное устройство, на фиг.1 не показаны, так как не влияют на существо данного предложения.
Цепи питания обмоток 23-26 и выходы датчиков зазора 4 подключены ко входам блока радиальной стабилизации 5. Датчики тока 12-15 включены в цепи питания обмоток электромагнитов. Ко входам каждого из блоков вычисления центрирующих сил 16 и 17, 18 и 19 подключены выходы датчиков тока, которые включены в цепи питания соосно расположенных электромагнитов и датчиков зазора. Так, например, к первому и второму, если считать слева направо, входам блока 18 присоединены выходы датчиков тока 15 и 13, которые включены в цепи питания обмоток 25 и 24 электромагнитов 3, расположенных по оси Z1, то есть соосно. На третий и четвертый входы блока 18 поступают выходы датчиков зазора 4, расположенные по оси Z2, которая параллельна оси Z1. По такому же принципу осуществляется соединение входов блоков 16, 17, 19 с выходами других датчиков тока и зазора.
Выходы же блоков 16 и 18, 17 и 19 попарно присоединены ко входам блоков вычисления гироскопических моментов 20, 21 соответственно, выходы которых поступают на входы сумматора 22, своим выходом соединенным с входом обратной связи 10 узла сравнения 11. Электродвигатель 6 состоит из электрической машины 27 (статор, ротор) и датчика скорости 28. В состав блока 8 входят усилители сигнала ошибки по моменту 29 (УСОМ) и по скорости (УСОС) 30, корректирующие звенья (К3) 31 и 32, усилитель мощности (УМ) 33, преобразователь сигнала скорости 34. На входе УСОС включен узел сравнения сигналов 35.
Расположение элементов гиростабилизатора ориентировано относительно осей XYZ, из которых ось Z совпадает с осью поворота рамки карданова подвеса 2, и названа входной; ось Y совмещена с осью вращения гироскопа 1; а ось Х, перпендикулярная плоскости, образуемой осями YZ, называется выходной.
Устройство работает следующим образом. Электромагнитные опоры обеспечивают взвешенное (левитирующее) состояние гироскопа 1 с помощью системы стабилизации зазора, образованной датчиками зазора 4, электромагнитами 3 и блоками радиальной стабилизации (БРС) 5. Принцип действия конструкции электромагнитных опор подробно описан в литературе. По сигналам датчиков зазора 4 блок радиальной стабилизации создает в обмотках 23, 24 и 25, 26 токи i23, i24, i25, i26 соответственно, которые в свою очередь создают пары магнитных центрирующих сил F23 и F24, F25 и F26, приложенных к оси вращения маховика, причем, силы каждой пары направлены встречно по отношению друг к другу, в результате чего по осям Z1 и Х1 действуют результирующие центрирующие силы правой и левой опор:

где индексами "П" и "Л" отмечены силы, относящиеся к правой и левой опорам соответственно.
Зависимость сил F23-F26 от тока определяется типом бесконтактных опор, на фиг.1 для конкретности изображены простейшие электромагнитные опоры, но могут быть использованы и другие, так как на существо предложения не влияет, центрирующие силы связаны с токами электромагнитов нелинейными зависимостями.

где α=0,25μ0W·S, μ0=4π·10-7 Гн/м,
W - число витков обмотки,
S - площадь поперечного сечения электромагнита,
δ - величина зазора.
Из (1) и (2) имеем выражения для центрирующих сил по осям Z, Х правой и левой опор:

Токи в обмотках электромагнитов 23-26, относящихся к правой и левой опорам, обозначены для простоты в (3) одинаково (i23-i26), но имеют различное значение для правой и левой опор. Вычисление центрирующих сил в соответствий с (3) осуществляется вычислительными блоками 16 и 17, 18 и 19, для чего на входы этих устройств подаются, сигналы тока и зазора. Как видно по входным связям, показанным на фиг.1 блоки 16, 17, 18, 19 вычисляют соответственно центрирующие силы: 


 и формируют на своих выходах сигналы (напряжение или код), пропорциональные этим силам.
и формируют на своих выходах сигналы (напряжение или код), пропорциональные этим силам.
Если пренебречь динамическими составляющих сил, равными произведению момента инерции на угловое ускорение, что обычно делается в рамках прецессионной теории гироскопов, то центрирующие силы уравновешивают в основном составляющие силы веса (РZ; РХ) и силы гироскопического момента (
 ):
):


где РZ, РX - составляющие силы веса по осям Z и Х,
 - силы гироскопического момента, действующие со стороны гироскопа по осям Z и Х соответственно. Так как гироскопический момент приложен к опорам через пару сил, то в (4) для правой опоры взят знак "минус", а для левой - "плюс". Вычислительные блоки 20 и 21 осуществляют вычитание сигналов, поступающих с выходов 16 и 18, 17 и 19 соответственно, посредством чего в соответствии с (4) вычисляются гироскопические силы:
- силы гироскопического момента, действующие со стороны гироскопа по осям Z и Х соответственно. Так как гироскопический момент приложен к опорам через пару сил, то в (4) для правой опоры взят знак "минус", а для левой - "плюс". Вычислительные блоки 20 и 21 осуществляют вычитание сигналов, поступающих с выходов 16 и 18, 17 и 19 соответственно, посредством чего в соответствии с (4) вычисляются гироскопические силы:
Так как произведение этих сил на межцентровое расстояние электромагнитных опор есть гироскопический момент, то на выходах блоков 20 и 21 формируются сигналы, пропорциональные гироскопическим моментам относительно осей Z и X:


где 

l - упомянутое межцентровое расстояние, сигналы UZ и UX суммируются блоком 22, на выходе которого образуется сигнал обратной связи:

который поступает на вход 10 электропривода вращения рамки (ПВР), где сравнивается с сигналом управления моментом  , поступающим на вход 9 (фиг.2).
, поступающим на вход 9 (фиг.2).
Сигнал ошибки усиливается усилителем 29 и задает скорость двигателя 6 с помощью системы управления скоростью, содержащей, кроме датчика скорости 28, узлы 30, 32-34. Работа этой системы очевидна из фиг. 2 и пояснений не требует.
Под воздействием сигнала управления двигатель 27 воздействует через редуктор 7 на рамку подвеса 2, поворачивая ее на угол α относительно входной оси Z; при этом относительно выходной оси X возникает гироскопический момент.
Переносные скорости вращения основания гиростабилизатора WX, WZ также приведут к возникновению гироскопических моментов относительно осей Х и Z; эти три момента стремятся изменить зазор под полюсами электромагнитов; блок 5 реагирует на изменение зазора путем изменения тока в обмотках электромагнитов, что вызывает появление дополнительных составляющих центрирующих сил в соответствии с (3), которые уравновешивают гироскопические силы, в результате чего ось вращения гироскопа сохраняет свое положение в пределах некоторой статической ошибки стабилизации зазора, вычислительное устройство в соответствии с вышеописанным алгоритмом работы формирует на выходе блока 22 сигнал обратной связи в соответствии с формулой (5), который вычитается из . Так как коэффициент усиления усилителя 29 велик, то
откуда следует, что

иначе говоря, скорость двигателя ПВР автоматически задается такой, что обеспечивается выполнение равенства (6), корректирующие звенья 31, 32 (фиг.2), как обычно в подобных устройствах, обеспечивают устойчивость и необходимую динамику работы.
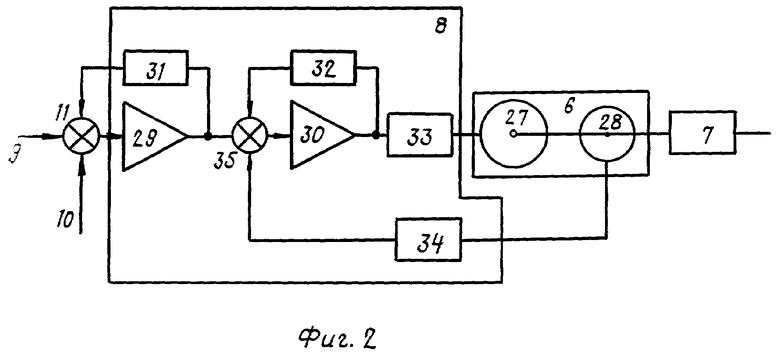
Рассмотрим два основных режима работы гиростабилизатора: режимы неподвижного и вращающегося основания. В первом случае переносные скорости отсутствуют: WX=WZ=0, на вход 9 подается сигнал управления , следовательно, этот режим - режим управления. Во втором случае имеются переносные скорости  значит этот режим - это режим пассивной стабилизации. Для анализа режимов на фиг.3 приведены оси координат: X0, У0, Z0 - исходная, X, У, Z - связанная с рамкой подвеса, как показано на фиг.1. Для упрощения анализ ведем в рамках прецессионной теории, полагая как обычно: IЭ (''α+WZ)=0,
значит этот режим - это режим пассивной стабилизации. Для анализа режимов на фиг.3 приведены оси координат: X0, У0, Z0 - исходная, X, У, Z - связанная с рамкой подвеса, как показано на фиг.1. Для упрощения анализ ведем в рамках прецессионной теории, полагая как обычно: IЭ (''α+WZ)=0,  где IЭ - экваториальный момент инерции гироскопа. Моментом трения пренебрегаем. В первом режиме (фиг.3а) по сигналу ПВР поворачивает рамку относительно оси Z со скоростью
где IЭ - экваториальный момент инерции гироскопа. Моментом трения пренебрегаем. В первом режиме (фиг.3а) по сигналу ПВР поворачивает рамку относительно оси Z со скоростью  На оси У0 и X0 выделяются проекции кинетического момента: НУ=H·cosα, НX=H·sinα и гироскопический момент
На оси У0 и X0 выделяются проекции кинетического момента: НУ=H·cosα, НX=H·sinα и гироскопический момент  вызывающий реакцию в электромагнитах 25, 26 (фиг.1). Поэтому в соответствии с (6):
вызывающий реакцию в электромагнитах 25, 26 (фиг.1). Поэтому в соответствии с (6):

Относительно выходной оси Х действует управляющий гироскопический момент, пропорциональный :
Второй режим имеет два варианта:
1) 


2) 

В первом варианте на ось X выделяется гироскопический момент  (фиг.3а), но так как
(фиг.3а), но так как  , то в соответствии с (6):
, то в соответствии с (6):

Отсюда  т.е. ПВР вращает рамку так, что вектор Н сохраняет неизменное направление в системе координат Х0, У0, Z0; при этом моменты относительно осей Х и Z равны нулю. Это значит, что предложенное устройство ведет себя как свободный (не защемленный по оси Z) гироскоп, использованный в прототипе. Во втором варианте (фиг.3б) вектор Н поворачивается на угол β=WX·t, при этом возникает гироскопический момент
т.е. ПВР вращает рамку так, что вектор Н сохраняет неизменное направление в системе координат Х0, У0, Z0; при этом моменты относительно осей Х и Z равны нулю. Это значит, что предложенное устройство ведет себя как свободный (не защемленный по оси Z) гироскоп, использованный в прототипе. Во втором варианте (фиг.3б) вектор Н поворачивается на угол β=WX·t, при этом возникает гироскопический момент  , под влиянием которого изменяется центрирующая сила электромагнитов 23, 24 (фиг.1) и формируется сигнал
, под влиянием которого изменяется центрирующая сила электромагнитов 23, 24 (фиг.1) и формируется сигнал  под воздействием которого ПВР поворачивает рамку на угол α с отрицательной скоростью -
под воздействием которого ПВР поворачивает рамку на угол α с отрицательной скоростью -  (фиг.3). Относительно оси Х при этом возникает гироскопический момент
(фиг.3). Относительно оси Х при этом возникает гироскопический момент  . В соответствии с (6).
. В соответствии с (6).

откуда следует, что
При этом относительно оси X действует момент
который направлен встречно вектору переносной скорости  (фиг.3б) и, следовательно, препятствует вращению вокруг оси X так же, как свободный гироскоп в прототипе.
(фиг.3б) и, следовательно, препятствует вращению вокруг оси X так же, как свободный гироскоп в прототипе.
Что касается нутационных колебаний, то в предлагаемом устройстве эти колебания устраняются с помощью корректирующего звена 31 (фиг.2).
Из приведенного описания устройства видно, что предлагаемое устройство обладает положительными качествами прототипа:
- создает управляющий момент относительно выходной оси, пропорциональный сигналу управления;
- обеспечивает пассивную стабилизацию положения платформы.
Предлагаемый гиростабилизатор по сравнению с прототипом имеет преимущества:
1) улучшение стабилизирующего свойства. Как отмечалось выше, стабилизирующее свойство прототипа ухудшается из-за вредного влияния момента трения в опорах карданова подвеса. В предлагаемом устройстве момент трения не влияет на эту характеристику, так как система регулирования момента имеет обратную связь по гироскопическим моментам относительно осей X и Z, которые измеряются с помощью магнитного подвеса и вычислительных устройств, характеристики которых линейны в области малых моментов и не имеют зоны нечувствительности;
2) большой диапазон регулирования выходного момента, который обеспечивается повышением верхнего предела благодаря использованию редуктора и снижением нижнего предела посредством установки датчика скорости на валу двигателя, а не рамки подвеса. Если порог скорости прототипа  то в данном устройстве -
то в данном устройстве -  где i - передаточное число редуктора. Благодаря усилению момента редуктором максимальное значение момента может быть весьма большим, например, 50-100 Нм, чего нельзя обеспечить в прототипе;
где i - передаточное число редуктора. Благодаря усилению момента редуктором максимальное значение момента может быть весьма большим, например, 50-100 Нм, чего нельзя обеспечить в прототипе;
3) так как редуктор входит в замкнутую систему регулирования скорости, которая входит в замкнутую по моменту систему, то трение, люфт, неравномерность хода редуктора не ухудшают характеристики гиростабилизатора;
4) благодаря введению обратных связей по моменту и скорости переходные процессы (в том числе выборка люфта редуктора) проходят при форсированных режимах работы ПВР, что повышает быстродействие гиростабилизатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| Индикаторный гиростабилизатор | 2021 |
|
RU2790028C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
Изобретение относится к гироскопическим приборам и может быть использовано в качестве исполнительного органа систем управления космических аппаратов. Сущность: устройство содержит одноосный кардановый подвес, в котором размещен силовой гироскоп с электромагнитными опорами ротора и блоком управления приводом вращения рамки подвеса. При этом каждая из электромагнитных опор содержит две расположенные во взаимно перпендикулярных направлениях пары соосных электромагнитов и двухкоординатный датчик зазоров. Пары электромагнитов расположены симметрично относительно оси подвеса ротора. Измерительные элементы датчика сориентированы аналогично обмоткам электромагнита. Выходы измерительных элементов датчика зазоров через блок радиальной стабилизации подключены к обмоткам электромагнитов, принадлежащих той же опоре. Кроме того, устройство содержит четыре блока вычисления центрирующих сил электромагнитов опоры, которые выполнены в виде последовательно соединенных умножителей и квадраторов, два блока вычисления гироскопических моментов, выполненных в виде вычитателей, сумматор и датчики тока, соединенные с обмотками электромагнитов. При этом, ко входам каждого блока вычисления центрирующих сил электромагнитов подключены выходы датчиков тока, соединенных с обмотками одной пары соосных электромагнитов, и выходы соосных с ними измерительных элементов датчика зазора, принадлежащего той же опоре. Выходы блоков вычисления центрирующих сил соосных пар электромагнитов, принадлежащих к различным опорам, соединены со входами блоков вычисления гироскопических моментов, выходы которых соединены со входами сумматора, выход которого соединен со входом блока управления приводом вращения рамки. Технический результат: повышение стабилизации путем уменьшения влияния вредных моментов, действующих по оси подвеса рамки. 3 ил.
Гироскопический стабилизатор, содержащий размещенный в одноосном кардановом подвесе силовой гироскоп с электромагнитными опорами ротора и блоком управления приводом вращения рамки подвеса, причем каждая из электромагнитных опор содержит две расположенные во взаимно перпендикулярных направлениях пары соосных, симметричных относительно оси подвеса ротора, электромагнитов, двухкоординатный датчик зазоров, измерительные элементы которого сориентированы аналогично обмоткам электромагнита, при этом выходы измерительных элементов датчика зазоров через блок радиальной стабилизации подключены к обмоткам электромагнитов, принадлежащих той же опоре, отличающийся тем, что, с целью повышения точности стабилизации путем уменьшения влияния вредных моментов, действующих по оси подвеса рамки, в его состав дополнительно введены четыре блока вычисления центрирующих сил электромагнитов опоры, выполненных в виде последовательно соединенных умножителей и квадраторов, два блока вычисления гироскопических моментов, выполненных в виде вычитателей, сумматор и датчики тока, соединенные с обмотками электромагнитов, причем ко входам каждого блока вычисления центрирующих сил электромагнитов подключены выходы датчиков тока, соединенных с обмотками одной пары соосных электромагнитов, и выходы соосных с ними измерительных элементов датчика зазора, принадлежащего той же опоре, выходы блоков вычисления центрирующих сил соосных пар электромагнитов, принадлежащих к различным опорам, соединены со входами блоков вычисления гироскопических моментов, выходы которых соединены со входами сумматора, выход которого соединен со входом блока управления приводом вращения рамки.
| Лидек | |||
| Управление силовыми гироскопами прецизионной системы на ведения, Вопросы ракетной техники №11, 1974, с.74-86 | |||
| Н.Н.Шереметьевский, Д.М.Вейрберг, В.П.Верещагин, Н.Н.Данилов-Нитусов | |||
| Силовой гироскоп с электромагнитными подшипниками для управления ориентацией орбитальных станций | |||
| Космические исследования, 1983, №1, с.139-142. |

