(54) С-ПОСОБ СТЕРЕОРЕНТГЕНОГРАММЕТРИЧЕСКОЙ СЪЕМКИ.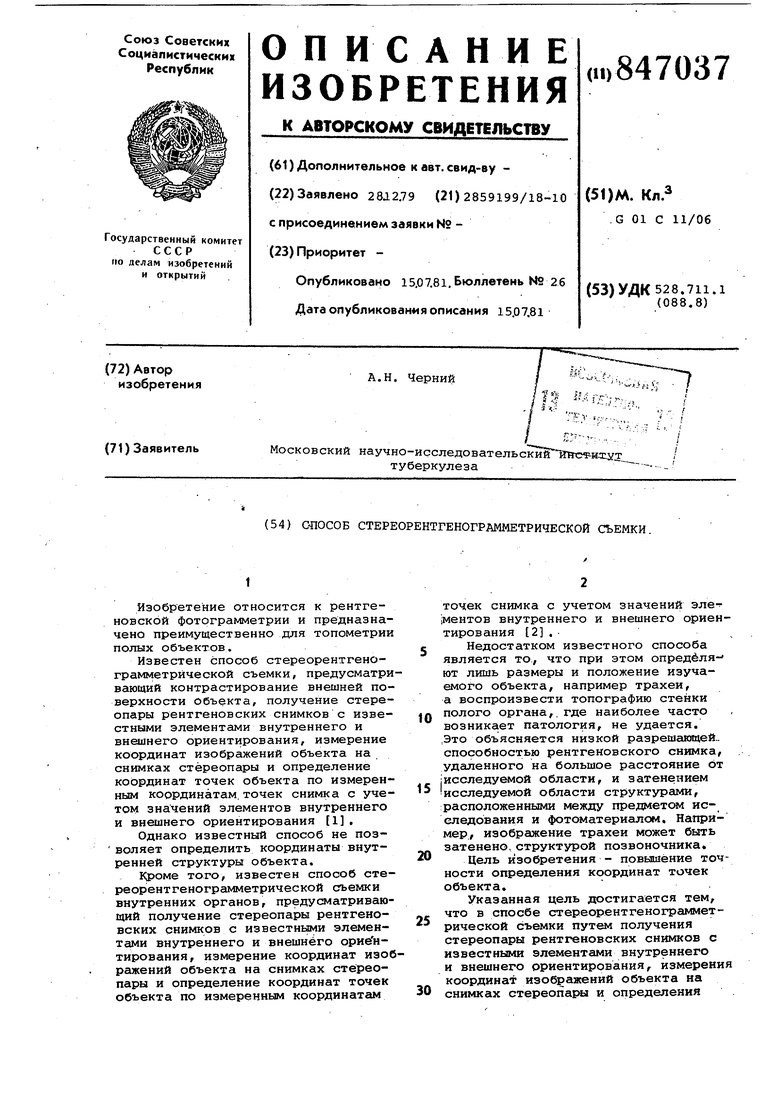
1
Изобретение относится к рентгеновской фотограмметрии и предназначено преимущественно для топометрии полых объектов.
Известен способ стереорентгенограмметрйческой съемки, предусматривающий контрастирование внешней поверхности Объекта, получение стереопары рентгеновских снимков с известными элементами внутреннего и внешнего ориентирования, измерение координат изображений объекта на снимках стереопары и определение координат точек объекта по измеренным координатам, точек снимка с учетом значений элементов внутреннего и внешнего ориентирования 1.
Однако известный способ не позволяет определить координаты внутренней структуры объекта.
Кроме того, известен способ стереорентгенограмметрической съемки внутренних органов, предусматривающий получение стереопары рентгеновских снимков с известными элементами внутреннего и внешнего ориентирования, измерение координат изображений объекта на снимках стереопары и определение координат точек объекта по измеренным координатам
точек снимка с учетом значений эле(ментов внутреннего и внешнего ориентирования 2 . ,
Недостатком известного способа является то, что при этом опредёля-ют лишь размеры и положение изучаемого объекта, например трахеи, а воспроизвести топографию стенки полого органа,, где наиболее часто
10 возникает патология, не удается. Это объясняется низкой разрешающей.. способностью рентгеновского снимка, удаленного на большое расстояние от исследуемой области, и затенением исследуемой области структурами,
15 расположенными между предмете исследования и фотоматериалом. Например, изображение трахеи может быть затенено, структурой позвоночника.
20
Цель изобретения - повышение точности определения координат точек объекта.
Указанная цель достигается тем, что в спосбе стереорентгенограммет25рической съемки путем получения стереопары рентгеновских снимков с известными элементами внутреннего и внешнего ориентирования, измерения координат изображений объекта на
30 снимках стереопары и определения
координат точек объекта по измеренным координатам точек снимков с учетом известных значений элементов внутреннего и внешнего ориентирования, одновременно с получением каждого из основных снимков стереопары экспонируют дополнительные снимки на фотоматериал, на который наложены рентгеноконтрастные метки, причем фотоматериал располагают в непосредртвенной близости от исследуемого объекта в зоне перекрытия основных снимков стереопары, образуют из дополнительных снимков стереопару, а элементы внутреннего и внешнего ориентирования дополнительной стереопары определяют по измеренным координатам изображений меток на основных и дополнительных снимках объекта.
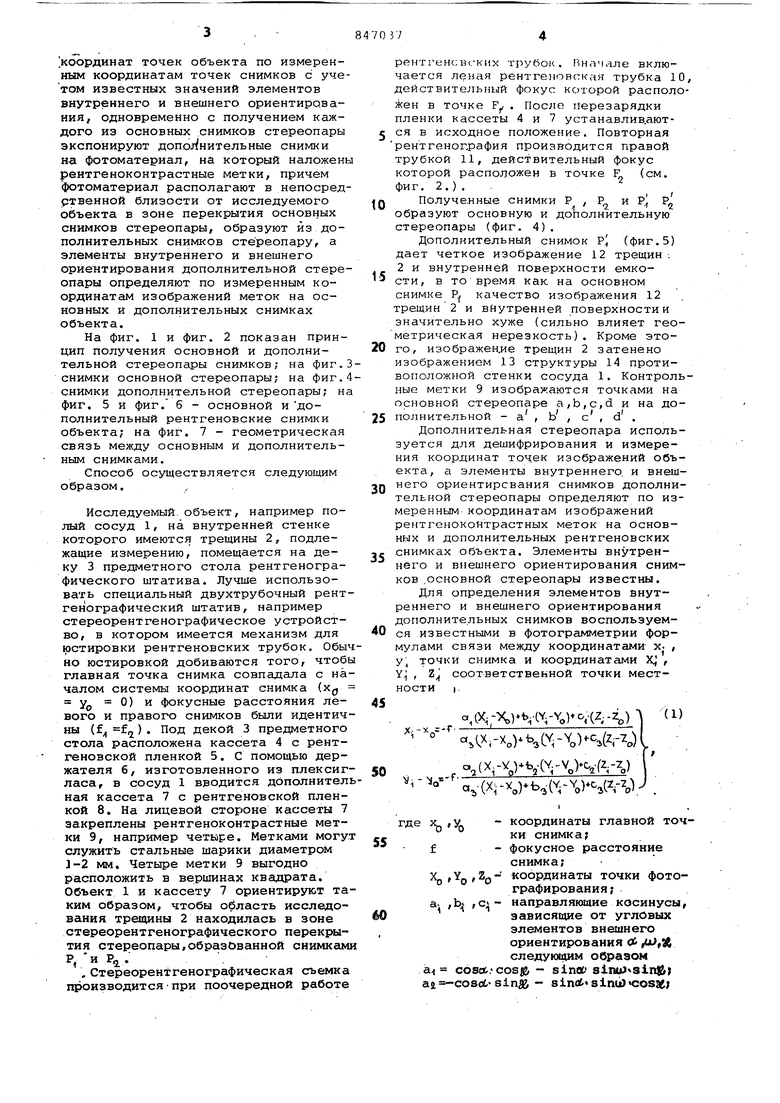
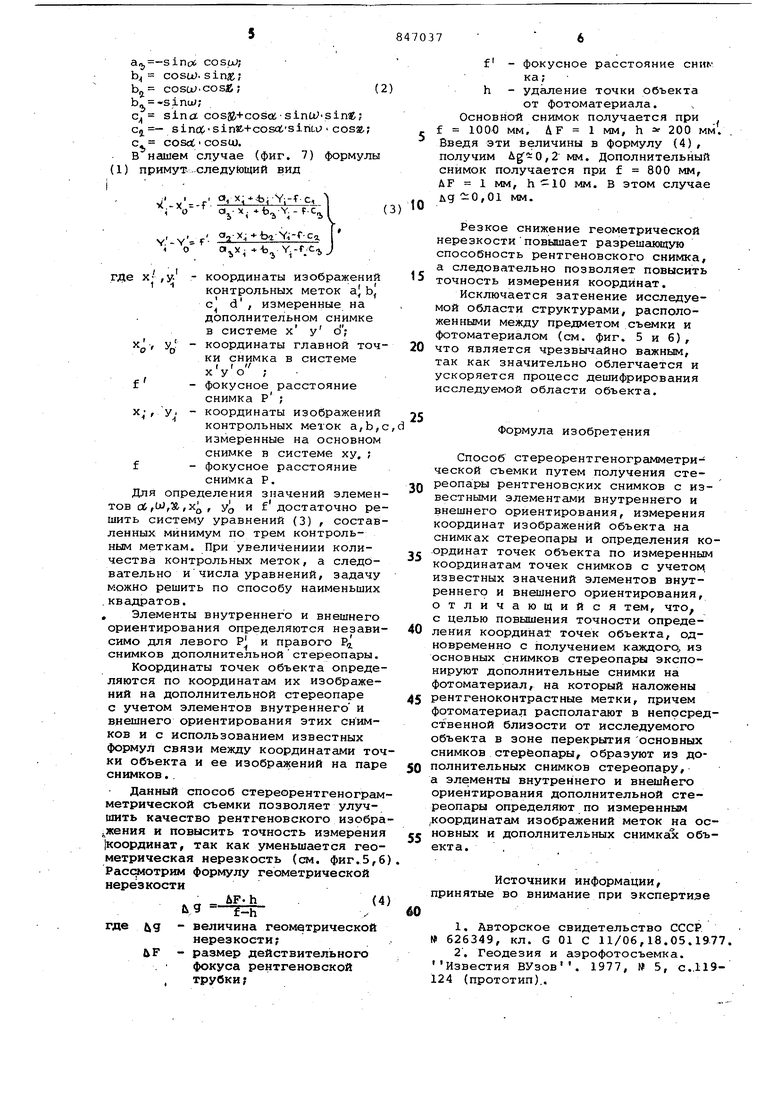
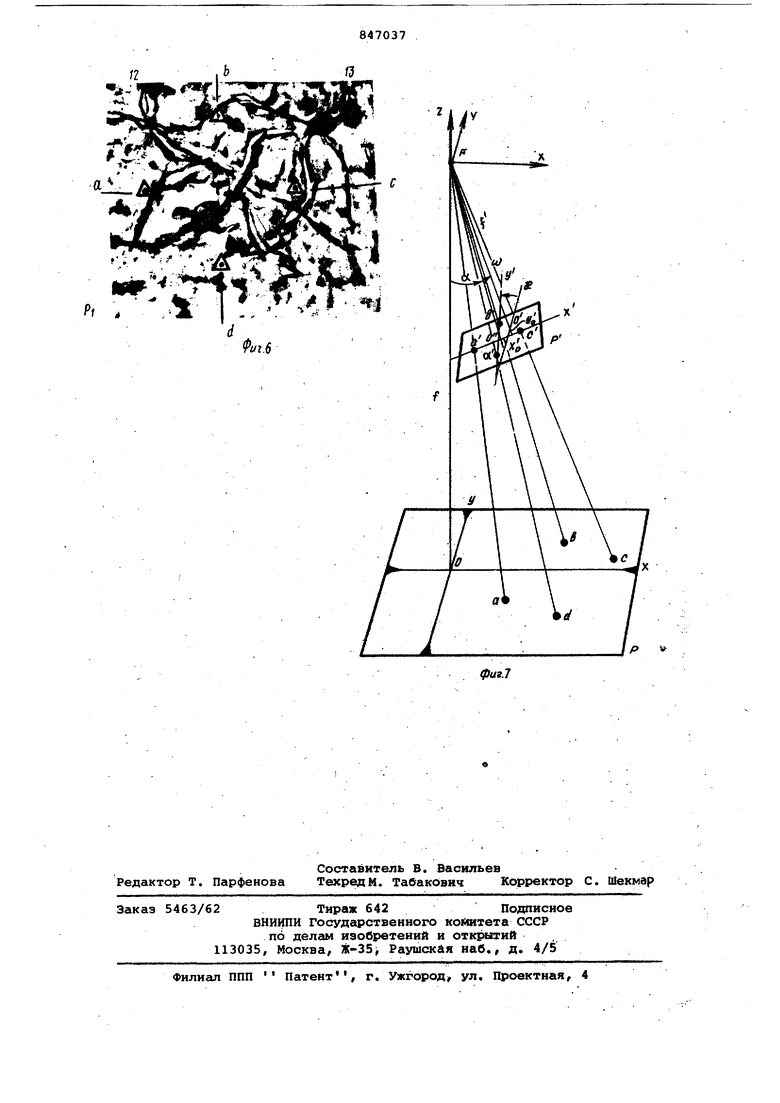
На фиг. 1 и фиг. 2 показан принцип получения основной и дополнительной стереопары снимков; на фиг.Зснимки основной стереопары; на фиг.4снимки дополнительной стереопары; на фиг. 5 и фиг. 6 - основной и дополнительный рентгеновские снимки объекта; на фиг. 7 - геометрическая связь между основным и дополнительным с н имк ами.
Способ осуществляется следующим образом. ,
Исследуемый объект, например полый сосуд 1, на внутренней стенке которого имеются трещины 2, подлежащие измерению, помещается на деку 3 предметного стола рентгенографического штатива. Лучше использовать специальный двухтрубочный рентгенографический штатив, например стереорентгенографическое устройство, в котором имеется механизм для юстировки рентгеновских трубок. Обычно юстировкой добиваются того, чтобы главная точка снимка совпадала с началом системы координат снимка (х УО фокусные расстояния левого и правого снимков были идентичны (f f) . Под декой 3 предметного стола расположена кассета 4 с рентгеновской пленкой 5. С помощью держателя б, изготовленного из плексигласа, в сосуд 1 вводится дополнительная кассета 7 с рентгеновской пленкой 8. На лицевой стороне кассеты 7 закреплены рентгеноконтрастные метки 9, например четыре. Метками могут служить стальные шарики диаметром 1-2 мм. Четыре метки 9 выгодно расположить в вершинах квадрата. Объект 1 и кассету 7 ориентируют таким образом, чтобы область исследования трещины 2 находилась в зоне стереорентгенографического перекрытия стереопары,образованной снимками
. Стереорентгенографическая съемка
производится при поочередной работе
рентгенсвскнх трубок. Вначале включается леная рентгеновская трубка 1 действительный фокус которой распол)keH в точке F . Поело перезарядки пленки кассеты 4 и 7 устанавлив.аются в исходное положение. Повторная рентгенография производится гфавой трубкой 11, действительный фокус которой расположен в точке F (см. фиг. 2.). .
Полученные снимки Р , Р и Р р образуют основную и дополнительную стереопары (фиг, 4),
Дополнительный снимок Р (фиг.5) дает четкое изображение 12 трещин . 2 и внутренней поверхности емкости, в то время как на основном снимке Р качество изображения 12 трещин 2 и внутренней поверхности и значительно хуже (сильно влияет геометрическая нерезкость). Кроме этого, изображение трещин 2 затенено изображением 13 структуры 14 противоположной стенки сосуда 1, Контролные метки 9 изображаются точками на основной стереопаре a,b,c,d и на дополнительной - а , ь , с , d .
Дополнительная стереопара используется для дешифрирования и измерения координат точ.ек изображений объекта, а элементы внутреннего, и внешнего ориентирования снимков дополнительной стереопары определяют по измеренным координатам изображений рентгеноконтрастных меток на основных и дополнительных рентгеновских снимках объекта. Элементы внутреннего и внешнего ориентирования снимков .основной стереопары известны.
Для определения элементов внутреннего и внешнего ориентирования дополнительных снимков воспользуемся известными в фотограмметрии формулами связи между координатами х. , у, точки снимка и координатами Xi, Y , соответственной точки местности I
/У,-Х)-УХЛ)) 1) ° с,1.х,-х„)ь,СХ-Х,)-(2г,)1
г .()(гУ
C,,,-(X--X,)(,(7.-2);
где yj - координаты главной точки снимка; f - фокусное расстояние
снимка;
XP,YQ,ZO- координаты точки фотографирования;
а-, /Ц исправляющие косинусы эависяище от угловых элементов внешнего ориентирования сх а,7К следующим образом а-( cbsct.-cosjg, - sinet- slnu} sinl&; аа -cosot-sln - sinat«slnu)«cosjt; an,-з1п(Х cosaj; b cosLt) sinx,; Ь„ cosuj-cosu;(2 (jj; c since cosjl+coscfc-sinu sin ; sinotSinK+cosctsiriLU C. COSctCOSW. В нашем случае (фиг. 7) формулы (1) примут-. следующий вид а, с rVа,-х. ь.у.-.с„ V Y- f о- .-b Y.-fc,, где X , v;. - координаты изображений контрольных меток а{ ь| с d, измеренные на дополнительном снимке в системе х у ху у - координаты главной точки снимка в системе If ху о ; f - фокусное расстояние снимка Р; , у. - координаты изображений контрольных меток a,b, измеренные на основном снимке в системе ху, ; f - фокусное расстояние снимка Р. Для определения значений элемен тов ct,w,,XQ, УО и fдостаточно ре шить систему уравнений (3) , состав ленных минимум по трем контрольным меткам. При увеличениии количества контрольных меток, а следовательно и числа уравнений, задачу можно решить по способу наименьших .квадратов. , Элементы внутреннего и внешнего ориентирования определяются незави симо для левого Р и правого Р снимков дополнительнойстереопары. Координаты точек объекта опреде ляются по координатам их изображений на дополнительной стереопаре с учетом элементов внутреннего и внешнего ориентирования этих снимков и с использованием известных формул связи между координатами то ки объекта и ее изображений на пар снимков.. Данный способ стереорентгенограм метрической съемки позволяет улучшить качество рентгеновского изобр жения и повысить точность измерени координат, так как уменьшается гео метрическая нерезкость (см. фиг.5, PacqMOTpHM формулу геометрической нерезкости .,-4 / где д - величина геометрической нерезкости UF - размер действительного . фокуса рентгеновской трубки; f - фокусное расстояние сниг ка; h - удаление точки объекта от фотоматериала. Основной снимок получается при f 100G мм, AF 1 мм, h з 200 мм. Введя эти величины в формулу (4), получим ,2 мм. Дополнительный снимок получается при f 800 мм, AF 1 мм, h-10 мм. В этом случае лд -0,01 мм. Резкое снижение геометрической нерезкостиповышает разрешающую способность рентгеновского снимка, а следовательно позволяет повысить точность измерения координат. Исключается затенение исследуемой области структурами, расположенными между предметом съемки и фотоматериалом (см. фиг. 5 и 6), что является чрезвычайно Вс1жным, так как значительно облегчается и ускоряется процесс дешифрирования исследуемой области объекта. Формула изобретения Способ стереорентгеногрс1мметрической съемки путем получения стереопары рентгеновских снимков с известными элементами внутреннего и внешнего ориентирования, измерения координат изображений объекта на снимках стереопары и определения координат точек объекта по измеренным координатам точек снимков с учетом, известных значений элементов внутреннего и внешнего ориентирования, отличающийся тем, что, с целью повышения точности определения координат точек объекта, одновременно с получением каждого, из основных снимков стереопары экспонируют дополнительные снимки на фотоматериал, на который наложены рентгеноконтрастные метки, причем фотоматериал располагают в непосредственной близости от исследуемого объекта в зоне перекрытия основных снимков стереопары, образуют из дополнительных снимков стереопару, а элементы внутреннего и внешйего ориентирования дополнительной стереопары определяют по измеренным ,координатам изображений меток на основных и дополнительных снимка с объекта. . Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 626349, кл. G 01 С 11/06,18.05.1977. 2. Геодезия и аэрофотосъемка. Известия ВУЗОВ . 1977, № 5, С..119124 (прототип).. ,VT-т ih Ч V, а47 4А L/--/ / I 5f -fa v
{pue. //VV v м V r . y-i .ii / feix -rVw .ж: ,/ у ::,; t /1 ; 4
