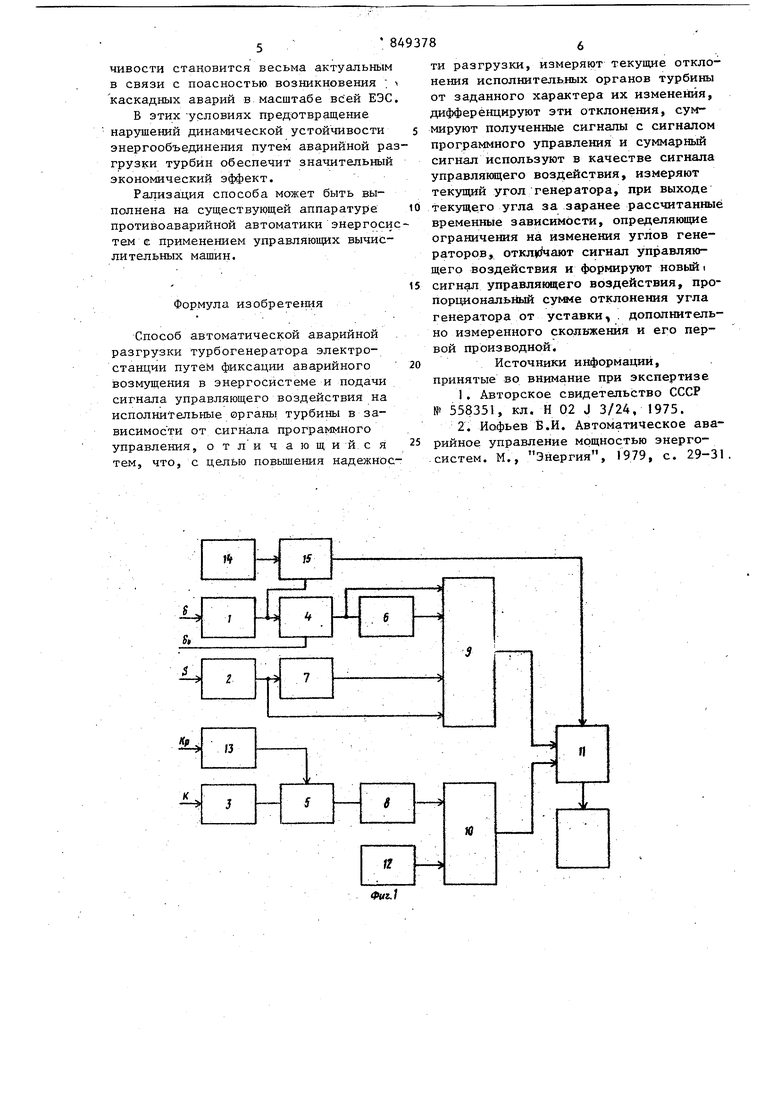
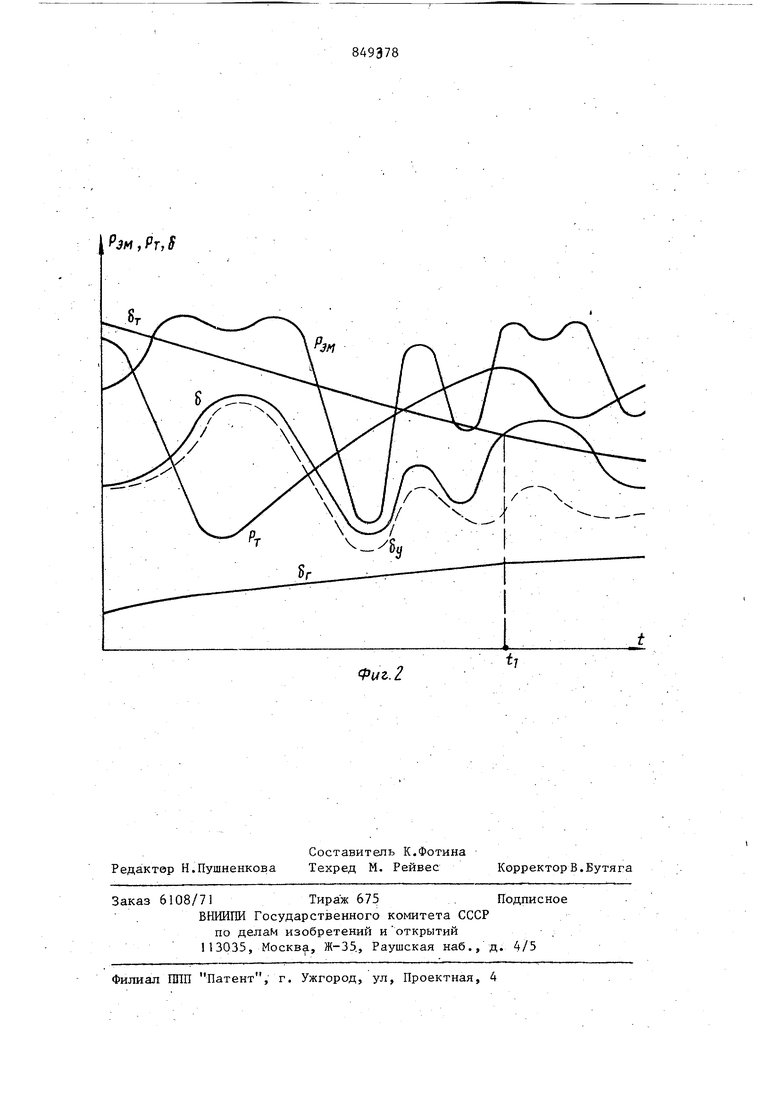
. I. . . Изобретение относится к эдектро.энергетике и может быть применено для по7 ышения надежности функционирования энергосистем в аварийных режимах. . . Известен способ автоматической аварийной разгрузки трубогенератора. электростанции, согласно К1эторому управляющее воздействие формируется по сигналам, пропорциональным скольжению и отклонению активной мощности генератора от уставки и их первым производным D5. Недостатки способа - косвенный учет аварийного возмущения и существенная зависимость закона управления от отклонений параметров переходного процесса в энергосистеме (на пример, скольжения), что в ряде случ ев .снижает эффективность способа на начальном этапе аварийного переходного процесса, когда скольжение мало а другие составляюи е управляющего сигнала не способствуют повышению динамической устойчивости. Так, например, в тот момент ь.з. первая производная скольжения может приводить к появлению управляющего : сигнала, препятствукдцего разгрузке турбины по условиям устойчивости энергосисте1ф1.. Наиболее близким к предлагаемому изобретению является способ автоматической аварийной разгрузки турбогенератора электростанции путем фиксации аварийного возмущения в энергосистеме и подачи сигнала управляющего воздействия на исполдательные органы турбины в зависимости от сигнала программного управления Г2. Недостатки способа -.низкая надежность при погрешностях обработки исполнительными органами аварийной разгрузки электростанции программы управления и отклонении текущего режима и схемы исхоуо-ных предпосьтрк от принятых в предварительных расчетах. Цель изобретения повышение на дежности разгрузки. Поставленная цель достигается тем, что в способе автоматической ав .рийной разгрузки турбогенератора электростанции путем фиксации аварийного возмущения в энергосистеме и подачи управляющего воздействия на исполнительные органы турбины в зависимости от сигнала программного управления, измеряют текущие отклонения исполнительных органов турбины от заданного характера изменения, диф ференцируют эти отклонения, суммируют полученные сигналы с сигналом програм много управления и суммарный сигнал используют в качестве сигнала управля ющего воздействия, измеряют угол генератора, при-выходе текущего угла за заранее рассчитанйые временные зависимости, определяющие ограничения на изменения углов генераторв, отличают сигнал управляющего воздействия и формируют новый сигнал управ ляющего воздействия, пропорциональиый сумме отклонения угла генератора от установки, дополнительно измеренного скольжения и его первой произвбдной. На фиг. 1 приведена блок-схема ус тройства, реализующая способ; на фиг. 2 - кривые, характеризующие переходный процесс при осуществлении способа. На фиг. 1 обозначены сЛ- текущее значение угла вектора ЭДС генератора, сЛ, установка угла вектора ЭДС г нератора; Кр - расчетное положение регулирующих клапанов; К - текущее . положение регулирующих клапанов; S скольжение, Устройство, реализующее способ по вышения динамической устойчивости, содержит датчик 1-3 соответственно угла ЭДС генератора, скольжения и положения исполнительных органов тур бины, арифметические устройства 4 и 5, дифференциаторы 6-8, сумматоры 9 10, устройство 11 коммутации, блок 12 формирования импульса программног управления, блок 13 формирования рас четного положения регулирующих клапа нов, блок 14 формирования временных зависимостей, ограничивающих область изменений угла ЭДС, блок 15 сравнени Устройство работает следующим образом. Датчиком 1 измеряют угол ЭДС генератора и определяют в арифметическом устройстве 4 отклонение его от установки, сигнал, пропорциональный этой величине подают в сумматор 9, этот же сигнал подают в дифференциатор 6, сигнал с выхода дифференциатора 6 подают в сумматор 9,. Датчиком 2 измеряют скольжение генераторов, полученный сигнал дифференцируют в дифференциаторе 7, дифференцированный и оба сигнала подают в сум матор 9. Датчиком 3 измеряют положё-г ние исполнительных органов турбины, регулирующих каналов, и в арифметическом устройстве 5 определяют отклонение положения регулирующих клапанов от расчетного, формируемого в блоке 13. Полученный сигнал диффв ренцируют в дифференциаторе 8, диф- ф.еренцированный и недифференцированный сигналы, подают в сумматор 10. В блоке формирования импульсов программного управления формируют сигнал программного управления и подают его в сумматор 10. Суммарный сигнал через коммутирующее устройство 11 подают на входы систем регулирования турбин станции. В блоке 14 формируют сигнал, пропорциональный зависимостям, ограничивающих область изменения угла / ЭДС генератора при устойчивом динамическом переходе и в блоке 15 сравнения сравнивают сигналом, пропорциональным действующему изменению угла, полученного от датчика 1, и при выходе угла генератора за область изменения в устойчивом динамическом переходе, в блоке 15 сравнения формируют сигнал, который попадается в коммутирующее устройство 11, коммутирующее устройство отключает сигнал от сумматора 10, сигнал от сумматора 9 подает на выход системы автоматичес кого регулирования турбин станций. На фиг. 2 обозначены Р- - мощность турбины; РЭИ электрическая мощность; о - угол генератора; сД, расчетное изменение угла генератора при устойчивом динимическом переходе; временные зависимости, ограничивающие область изменения угла генератора; t - время переключения на управление по программе на замкнутый закон регулирования. Применение способа повысит надежность управления мощностью станции для повышения динамической устойчивости- энергосистем. В условиях создания Единой энергетической системы вопрос повышения динамической устойчивости становится весьма актуальным в связи с поасностью возникновения ; каскадных аварий в масштабе всей ЕЭС В этих -условиях предотвращение нарушений динамической устойчивости энергообъединения путем аварийной ра грузки турбин обеспечит значительный экономический эффект. Рализация способа может быть выполнена на существующей аппаратуре противоаварийной автоматики энергоси тем е применением управляющих вычислительных машин. Формула изобретения Способ автоматической аварийной разгрузки турбогенератора электростанции путем фиксации аварийного возмущения в энергосистеме и подачи сигнала управляющего воздействия на исполнительные органы турбины в зависимости от сигнала программного управления, отличающийся тем, что, с целью повьшения надежнос ти разгрузки, измеряют текущие отклонения исполнительных органов турбины от заданного характера их изменения, дифференцируют эти отклонения, суммируют полученные сигналы с сигналом программного управления и суммарный сигнал используют в качестве сигнала управляющего воздействия, измеряют текущий УГОЛ генератора, при выходе текущего угла за заранее рассштанныё временные зависимости, определяющие ограниче1шя на изменения углов генераторов, отклц/чают сигнал управляющего воздействия н формируют новыйi сигнал управляющего воздействия, пропорциональный сумме отклонения угла генератора от уставкн . дополнительно измеренного скольжения и его первой производной. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 558351, кл. Н 02 J 3/24, 1975. 2.Иофьев Б.И. Автоматическое аварийное управление мощностью энергосистем. М., Энергия, 1979, с. 29-31

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ противоаварийного управления мощностью турбин | 1980 |
|
SU868918A1 |
| Устройство для аварийного управления активной мощностью электростанций | 1977 |
|
SU687529A1 |
| Устройство для экстренной разгрузки линии электропередачи при аварийном снижении предела передаваемой мощности | 1982 |
|
SU1083286A1 |
| Устройство для аварийного управления активной мощностью электростанции | 1978 |
|
SU788269A2 |
| Устройство для аварийного управления активной мощностью электростанций | 1981 |
|
SU983891A1 |
| Устройство для аварийного управления активной мощностью электростанции | 1990 |
|
SU1718329A2 |
| Способ однофазного автоматического повторного включения (ОАПВ) линии электропередачи | 1986 |
|
SU1394327A1 |
| Способ обеспечения статической устойчивости при аварийном ослаблении связи электростанции с энергосистемой | 1982 |
|
SU1050038A1 |
| СПОСОБ ПРОТИВОАВАРИЙНОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ТУРБОГЕНЕРАТОРА БЛОЧНОЙ ТЕПЛОВОЙ ЭЛЕКТРОСТАНЦИИ (ВАРИАНТЫ) | 2010 |
|
RU2412512C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПРЕДОТВРАЩЕНИЯ АСИНХРОННОГО РЕЖИМА ЭЛЕКТРОСТАНЦИИ | 1998 |
|
RU2160492C2 |
№
f5
Кр , Pr, S Фиг.. 2
