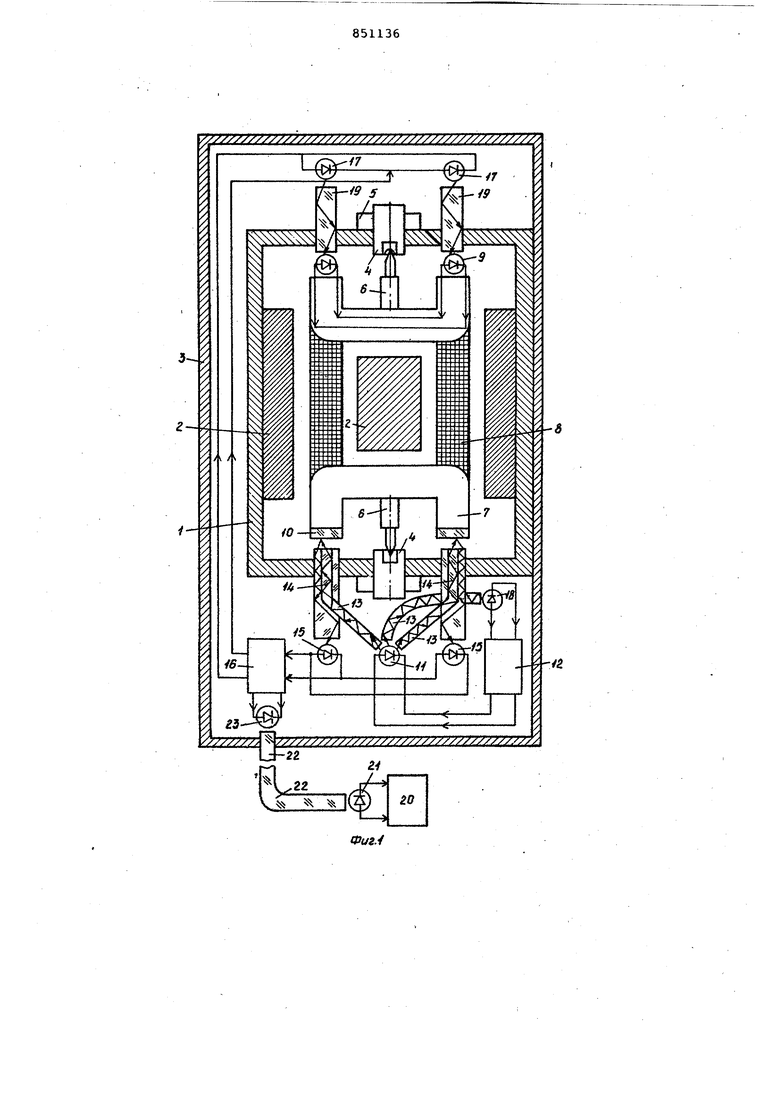
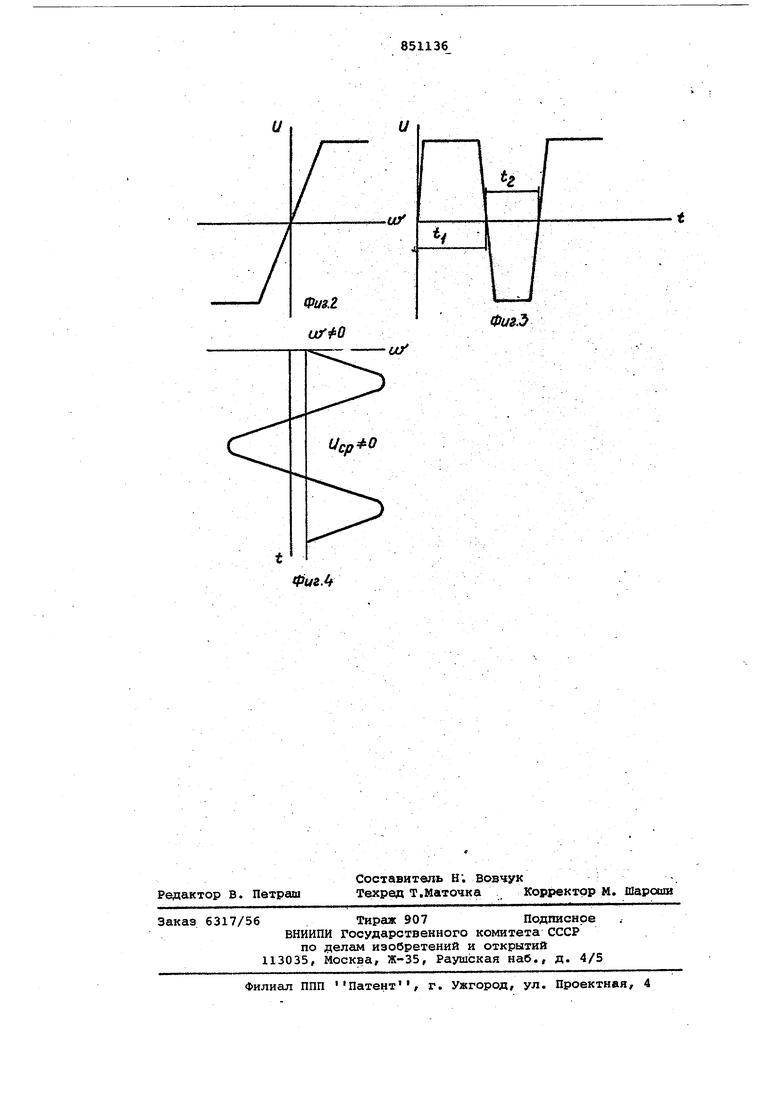
.Изобретение относится к измерительной технике и может быть исполь зовано в приборостроении при разработке измерителей линейных, угловых и гравитационных ускорений, а также микромоментометров компенсационного типа. Известны устройства для измерени моментов, сил и ускорений, содержащие корпус, подвижный чувствительны элемент, датчик углового положения чувствительного элемента, электронный блок обратной связи, токопереда щий узел и моментный датчик (1, Однако эти устройства не обеспечивают требуемой чувствительности и точности измерений вследствие неста бильности механического момента токопередающего узла. Наиболее близким по технической сущности к предлагаемому является устройство, содержащее корпус, подвижный чувствительный элемент,, датчик углового положения чувствительного элемента, электронный блок обратной связи с широтно-импульсной модуляцией выходного сигнала, магнитоэлектрический моментный датчик и оптронный токопередающий узел, выполненный s виде двух пар сопряже ных светоизлучателей и фотоприемников 2 . Однако это устройство для измерения моментов, сил и-ускорений не обеспечивает требуемой точнЪсти к надежности измерений вследствие нестабильности работы датчика углового положения чувствительного элемента, слабой помехозащищенности оптронного токопередающего узла и недоста.точной устойчивости механической колебательной системы к воздействию инерционных, вибрационных и ударных перегрузок. Цель изобретения - повышение надежности и точности. Поставленная цель достигается тем, что датчик углового положения чувствительного элемента выполнен в виде двух установленных на чувствительном элементе зеркальных отражателей 41 закрепленного на корпусе светоизлу чателя, подключенного к стабилизированному источнику питания и оптически связанного с трехканальным световодом,два канала которого выполнены коаксиальными, а на их выходе установлены дифференциально включенные полупроводникорые фотоприемники, подключенные к блоку обратной связи, при этом на выходе третьего канала световода установлен фотоприемник, идентичный по своим характеристикам дифференциально включенным полупроводниковым фотоприемником, выход которого связан с с1мплитудным регулятором стабилизированного источ (Ника питания, а на выходе блока обратной связи включен светоизлучатель связанный через световолоконный кабель и дополнительный фотоприемник со счетчиком. На фиг. 1 изображен преобразователь механических величин;на фиг.2 графики режимов работы устройства. Устройство для измерения моменто сил и ускорений состоит из корпус а связанного со стабилизированными ма нитами 2 моментного датчика гальван метрического типа и защитным кожухо З.В корпусе 1 с йймощью подшипников например,агатовых или сапфировых, р т улируемых гайкой 5, закреплен на кернах б подвижный чувствительный элемент 7, содержащий обмотку 8моментного датчика, к которой подключены дифференциальные включенные фо топриемники 9 оптронного токопередающего узла, и закреплены два зеркальных отражателя 10 оптронно- ветоводного датчика углового положения чувствительного элемента. Этот датчик установлен на корпусе 1 и со держит светоизлучатель 11, подключенный к стабилизированному источнику 12 питания и оптически сопряженный с трехканальным световодом 13, два канала 14 которого выполнены коаксиальньжш. На их выходах установлены дифференциально включенные полупроводниковые фотоприемники 15, подключенные через электронный блок 16 обратной связи к двум встре но-параллельно включенным полупроводниковым излучателям 17 оптронног токопередающего узла. На выходе третьего канала световода 13 установлен фотоприемник 18, который связан с амплитудным регуля тором стабилизированного источника 12 питания светоизлучателя . 11. При этом основные технические и эксплуа тационные характеристики фотоприемНИКОВ 15 и 18 идентичны. В корпусе 1 устройства закреплен полупроводниковые излучатели 17 и два световода 19, взаимно согласованн е по оптическим и спектральным харжтеристикам с фотоприемниками 9 оптронного токопередающего узла. Выходной сигнал устройства регистрируется, цифровым индикатором илр счетчиком 20, связанным с фотоприем ником 21 и световолоконным кабелем 22 через светоизлучатель 23 с элект ронным блоком 16 обратной связи, осуществляющим широтно-импульсную модуляцию выходного сигнала. Преобразователь работает следуюим образом. Под действием входного полезного сигнала в виде измеряемого момента, силы, линейного, углового или гравитационного ускорения, гравитационного градиента или угловой скорости подвижный чувствительный элемент 7 поворачивается относительно оси вращения в подшипниках 4 и 6 на угол f . Оптронно-световодный датчик углового положения чувствительного элемента преобразовывает его угловое перемещение в электрический сигнал, пропорциональный углу ft , Этот сигнал, полученный на выходе фотоприемников 15, усиливается и преобразуется в электронном блоке 16 обратной связи в широтно-импульсное модулированное напряжение, под действием которого начинают поочередн о излучать световой поток излучатели 17 оптронного токопередающего узла. Световой поток излучателей 17 через световоды 19 воспринимается дифференциально включенными фотоприемнийами 9,закрепленными на рамке чувствительного элемента 7 и связанными с обмоткагми 8 моментного датчика гальванометрического типа. На выходе фотоприемников 9 кроме переменного импульсного напряжения имеется и постоянная составляющая напряжения, пропорциональная сигналу оптронного датчика углового положения, которая создает в обмотке 8 ток, компенсирующий момент от измеряемого входного полезного сигнала. Бесконтактное измерение микроперемещений зеркальных отражателей 10, скрепленных с чувствительным элемен- том 7, относительно выходного торца коаксиальных световодов 14, скрепленных с корпусом 1, оптронного датчика углового положения чувствительного элемента осуществляется следую-щим образом. Световой поток (Фд) от светоизлучателя 11, запитанного от стабилизированного источника 12 питания, охваченного обратной связью по интенсивности света излучателя 11 с помощью световода 13 и фотоприемника 18, проходит повнутреннему кана лу коаксиальных световодов 14 и выходит из него в виде пучка лучей. Отразившись от зеркальных отражателей 10, световой поток попадает в приемную часть коаксигшьных световодов 14 и по ним поступает на фотоприемники 15, сигналы которых пропорциональны измеряемым перемещениям, а разностный сигнал дифференциально включенных фотоприемников 15 пропорционален измеряемому углу. Структура статических характеристик оптронного датчика углового положения показывает, что его дийамические характеристики можно представить нелинейньам элементом с хара теристиками типа ограничение. Такая характеристика датчика угловых положений является следствием конструктивных особенностей используемых коаксиальных световодов 14 и су ществованием режима насыщения в почупроводниковых фЬтоприемнлках 15, работёцощих в вентильном режиме. Наличие в преобразователе кроме механической колебательной системы и моментного датчика обратной связи нелинейного элемента в виде оптронного датчика углового положения чув ствительного элемента создает возможность для возникновения режима автоколебаний. В эхом режиме работы преобразователя, при отсутствии вход ного полезного сигнала, на выходе усилителя электронного -блока 16 обратной связи формируются импульсы . напряжения постоянной ампли- ; ды и длительности. Среднее значение напр жения, сримаёмого с выхода блока 16 и фотоприемников 9, в этом случае равно нулю. При действии на чувствительный элемент 7 входного полезного сигнала, например углового ускорения ао (фиг. 2), длительность импульсов на выходе блока 16 и излучателей 17 меняется (фиг. 3), и на выходе фотоприемников 9 появляется постоянная составляющая напряжения (фиг. 4)., пропорциональная измеряемому полез.ному сигналу, которая создает в обмотке 8 ток, компенсирующий силовое воздействие измеряемого ускорения . Таким образом, преобразователь работает в автоколебательном режиме компенсационного измерения инерционных, гравитационных и кориолисовых сил и ускорений. При этом автоколебательный режим работы устройства позволяет уменьшить,, в зависимости от частоты и амплитуды автоколебаний в десятки и сотни раз влияние сухого трения в подшипниковых опорах чувствительного элемента, приравнивая их по механической чувствительности к торсионным подвесам. Это позволяет существенно упростить конструкцию, изготовление и эксплуатацию механической колебательной системы с подшипниковыми опорами по сравнению с торсионными подвесами чувствительного элемента. Использование изобретения позволяет повысить точность, помехоз.ащищенность и надежность измерителей моментов,. сил и ускорений автокомпенсационного типа с линеаризацией выходного сигнала. Формула изобретения Преобразователь механических величин, содержащий корпус, подвижный чувствительный элемент, датчик углового положения чувствительного элемента, блок обратной связи, связанный со светоизлучателями оптронного токопередающего узла, и, моментный датчик, отличающийся тем, что, с целью повышения точности и надежности датчик углового положения чувствительного элемента выполнен в виде двух установленных на чувствительном элементе зеркальных отражателей и закрепленного на корпусе светоизлучателя, подключенного к стабилизированному источнику питания и оптически связанного с трехканальным световодом, два канала которого выполнены коаксиальными, а на их выходе установлены дифференциально включенные полупроводниковые фото- о приемники, полключенные к блоку обратной связи, при этом на выходе третьего канала световода установлен фотоприемник, идентичный по своим характеристикам дифференциально включенным полупроводниковым фотоприемникам, выход которого связан с амплитудным регулятором стабилизированного источника питания, а на выходе блока обратной связи включен светоизлучазель связанный через световолоконный кабель и дополнительный фотоприемник со счетчиком. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 356494, кл. G 01 L 3/14, 14.01.71. 2. Авторское свидетельство СССР 562738, кл. G 01 L 3/14, 02.02.76. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТРОННОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1972 |
|
SU340888A1 |
| Преобразователь напряжения в код | 1983 |
|
SU1145478A1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2006 |
|
RU2310166C1 |
| МУЛЬТИПЛЕКСНАЯ СИСТЕМА АВТОГЕНЕРАТОРНЫХ МИКРОРЕЗОНАТОРНЫХ ВОЛОКОННО-ОПТИЧЕСКИХ ДАТЧИКОВ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2001 |
|
RU2204810C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2015 |
|
RU2601530C1 |
| Акселерометр | 1979 |
|
SU845102A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ТОКА ФОТОПРИЕМНИКА ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА | 2020 |
|
RU2734999C1 |
| Устройство для автоматической фокусировки оптической системы записи-воспроизведения информации | 1990 |
|
SU1802877A3 |
| РЕЦИРКУЛЯЦИОННЫЙ УРОВНЕМЕР ЖИДКОСТИ | 1999 |
|
RU2161782C2 |