(54) УСТРОЙСТВО ДЛЯ ДИЛАТОМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ ПОЛИМЕРНЫХ МАТЕРИАЛОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ МИКРОДИЛАТОМЕТР | 1966 |
|
SU184486A1 |
| Автоматическое устройство для дилатометрических исследований | 1985 |
|
SU1278695A1 |
| Дилатометр | 1980 |
|
SU966569A1 |
| Силоизмерительное устройство | 1986 |
|
SU1339415A1 |
| Универсальная машина для испытаний материалов на кручение | 1959 |
|
SU148939A1 |
| Дилатометр для испытания полимерных материалов | 1988 |
|
SU1661634A1 |
| Прибор для испытаний материалов на микротвердость | 1990 |
|
SU1793294A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНОГО РАСШИРЕНИЯ МАТЕРИАЛА ОБРАЗЦА | 2010 |
|
RU2473891C2 |
| Поляризационно-оптический микродилатометр | 1977 |
|
SU729493A1 |
| Кварцевый дилатометр | 1978 |
|
SU805152A1 |
1
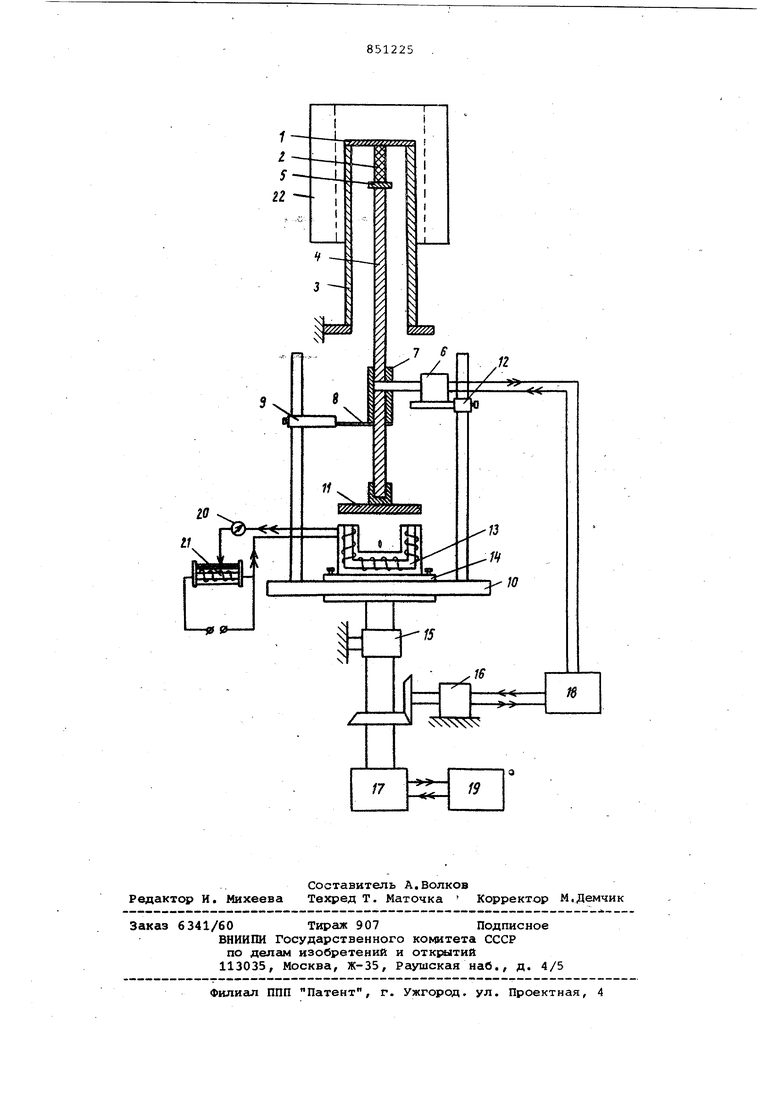
Изобретение относится к измери тельной технике и может быть использовано в химической, машиностроительной, электротехнической и других отраслях промышленности, производящих или использукщих полимерные материалы.
Известно устройство для проведения дилатометрических измерений полимеров , содержащее держатель для .образца, передающий стержень, к которому подвешена платформа с грузом, нагревательную печь и микроскоп МИР-2 для измерения деформации образ .
Измерение деформации образца на известных устройствах производится оператором визуально с помощью оптических приборов, что повьшает трудоемкость опытов, уменьшает точность измерений вследствие утомляемости оператора, затрудняет непрерывную регистрацию измерения длины образца в динамическом реяеиме измерения температуры.
Наиболее близким к предлагаемому является линейный микродилатометр, состоящий из кварцевой трубки с размещенным в ней кварцевым толкателем, прилеганиаим одним кониом к
поверхности образца, а другим - к датчику дефО{ ации - механотрону, кварцевой трубки с зталонным образцом для дифференциально-термического анализа, термоблока с программным регулированием температуры, системы вакуу1|О1рования образца, регистрирующего прибсфа и следяв ей системы, состоящей из микрсметрического винтового
to механизма, устанавливающего топкатель на образец, связанного с ре версивным электродвигателе, подключенкьм на вьвсод механотрона, включенного в качестве нуль-органа в
15 следя1кую систему. С целью уменьшения абсолютной величины измерительного усилия кварцевый толкатель закреплен в серьге, подвешенной на плоских пружингьх, соединенных с рег лиро20вочным эксцентриком и жестко закрепленных на неподвижной стойке,. Термическое расширение образца измеряется датчиком перемещения механотронсал, а следящая система служит толь25ко для автоматического подведения толкателя к образцу и выключается при проведении измерений. При различных положениях индикатора датчика перемещений вследствие различной .30 деформазхии упругих элементов датчика изменяется величина изме)ительно усилия, действующего на образец. За репление кварцевого толкателя на пл ких пружинах, жестко связанных с неподвижной стойкой, приводит к уме шению по абсолютной величине измери тельного усилия, но увеличивает его изменение в процессе эксперимен та, так как при перемещении толкате ля вследствие теплового расширения образца изменяется величина деформа ции упругих пружин и, соответственно, изменяется доля веса толкателя, компенсируемая упругими элементами 2. При испытании образцов из полиме ных материалов, особенно в области высокоэластического состояния, снижается точность измерГений вследстви непостоянства измерительного усилия действующего на образец в процессе измерения. Возможность проведения термомеханических испытаний в конструкции микродилатометра не предус мотрена. Цель изобретения - обеспечение во можности проведения термомеханических исследований и повьшение точнос измерений, особенно при испытании полимерных пленок, волокон, тонких пластинок, путем стабилизации измерительного усилия, действугацего на образец в процессе эксперимента. Указанная цель достигается тем, что устройство, содержащее опорную трубу , внутри которой расположен стержень, опираккдийся на индикатор положения и соединенный с системой регистрации, снабжено электромагнитом, якорь которого соединен с передающим стержнем, а сердечник элек ромагнита, индикатор положения механотрон и система упругих элемен тов закреплены на подвижном основании следящей системы, соединенном с дополнительно введенным датчике перемещения.. На чертеже представлена принципи альная схема предлагаемого устройст ва./ Зажим 1 с закрепленным в нем обраэ.цом 2 помш1ен на верхний торец опорной трубки 3, выполненной из ма териала, имеющего малый термический коэффициент линейного расширения (.например кварца). Передающий стержень 4, также выполненный из материала, именадего малый теЕМИческий коэффициент линейного расширения (например кварца) с пометцью зажима 5 подвешен к образцу 2 и опирает ся на чувствительный элемент индикатора 6 положения. Передающий стер жень 4 закреплен в серьге 7, подвешенной на системе упругих элементов 8. Упругие элементы 8 закреплены на кронштейне 9, установленном на подвижном основании 10. Якорь 11 электромагнита жестко соединен с пе редаквдим стержнем 4. Индикатор б положения закреплен на кронштейне 12, установленном на подвижном основании 10. Серд1ечник 13 электромагнита установлен на юстировочной плоцгщке 14, соединенной с подвижным основанием 10, Подвижное основание 10 опирается на микрометрический винтовой механизм 15, соединенный с помощью, например, зубчатой передачи с реверсивным электродвигателем 16, а с помощью, например, беззазорной крестовой муфты - с датчиком 17 перемещения. Индикатор б положения электрически связан через усилитель 18 с реверсивным электродвигателем 16, а датчик 17 перемещения электрически связан с регистрирующим прибором 19. Электромагнит 13 электрически связан через амперметр М и реостат 21 со стабилиз1{рованнь м источником питания. Нагрев образца осуществляется термоблоком 22 с программным регулированием температуры. Устройство работает следующим образом. После установки зажима 1 с закрепленным в нем образ цся«1 2 на опорной трубке 3 к образцу 2 с пс 4ощью зажима 5 подвешивают передаксций стержень 4 так, чтобы он опирался на чувствительный элемент индикатора б положения. При необходимости с (ью кронштейна 12 производят регулировку положения индикатора 6, затем с пс 1ощью крошитейна 9 регулируют натяжение упругих элементов 8, чтобы компенсировать вес передающего стержня 4 с зажимом 5, серьги 7 и якоря 11 электромагнита. Измерительное усилие Р, действующее на образец, можно рассчитывать по формуле Р Р, + 2+ - 4- 5 где- Р - вес передающего стержня 4 с зажимом 5, Pq - вес серьги 7, ч РЗ якоря 11 электромагнита;Р - измерительное усилие индикатора б положения, Р,. - реак1щя системы у прутах элемента 8. Таким образом, измерительное уси- лие Р легко регулируется по величине с помощью систегла упругих элементов 8. В качестве упругих элементов удобно использовать плоские пружины, а в качестве индикатора положения механотрон 6Мх1С ГОСТ 5.1658-72. В этом случае минимальное измерительное усилие,,,действующее на образец, равно 1х10 Н, что позволяет определять теркическое расширение полимерных пленок, волокон, тонких пластинок. Дилатометрические испытания проводят при выключенном электромагните. При тепловом расширении образ-, ца 2 передающий стержень 4 перемесаа ется и вызывает перемещение чувствительного элемента индикатора 6 положения, на выходе индикатора 6 положе ния появляется электрический сигнал, который усиливается в усилителе 18 и подается на реверсивный электродвигатель 16. Реверсивный электродвигатель 16 вращает микрометрический винтовой механизм 15, который перемещает подвижное основг ние 10 с закрепленными на нем индикатором 6 положения и системой упругих элементов 8 до тех пор, пока индикатор 6 положения не вернется в положение равновесия и электрический сигнал индикатора не станет равньол нулю. Индикатор 6 поло жения работает в режиме нуль-прибора, и следящая система все время воз вращает его в положение равновесия. Поэтому величина перемадения основания 10 равна изменению дпины образца в результате теплового расиирения и пропорциональна углу поворота микр метрического винтового механизма 15. Угол поворота микрометрического винтового механизма 15 намеряется датчиком 17 перемещения. Запись сигнала датчика 17 и температуры образца производится регистрирующшл прибором 19. В результате того, что индикатор 6 положения и система упругих элементов 8 установлены на подвижном основании 10, перемещение которого равно тепловой деформации образца, а измерение теплового расширения , образца 2 осуществляется дополнитель но введенным датчиком 17 перемещения по величине угла поворота микрометрического винтового механизма 15, де формация упругих элементов индикатора б положения и системы упругих элементов 8 остается постоянной в -процессе всего опыта, что и позволяет добиться стабилизации величины из мерительного усилия, действующего на образец в процессе эксперимента, и, соответственно, увеличения точнос ти эксперимента. Средний коэффициент линейного тер мического расширения исследуемого материала в интервале температур лТ рассчитывается по формуле где Л - разность показаний датчика перемещений 17 в интервале температур ДТ;-. К - коэффициент прог рциональности, определяемый экспериментально при тарировке прибора, SQ- длина образца при начально температуре. Для проведения термомеханических испытаний при необходимости:. внач лепроводят регулировку величины зазора между якорем 11 и сердечником 13 электромагнита с помощью гостировочной плсяцадки 14. По калиброванной кривой (зависимость усилия-,развиваемого электромагнитом, от -величины тока в цепи) определяют необходимую силу тока, соответствуквдую требуемой по условиям эксперимента нагрузке, и устанавливают ее с помощью реостата 21. Величину тока контролируют с помощью амперметра 20. Механическая деформация 6 образца измеряется так же, как и тепловая, и рассчитывается по формуле - Так как перемещеь ные платформы 10 с закрепленным на ней сердечником 13 электромагнита равно деформации образца,то величина зазора между якорем, соединенным с передающим стержнем, и сердечником электромагнита не изменяется в течение эксперимента, поэтому магнитный поток, а следовательно, и величина создаваемого усилия не зависят от величины деформации образца и остаются постоянными в процессе опыта. Применение предлагаемого устройства для дилатометрических и термомеханических исследований полимеров позволяет на 80% уменьшить трудоемкость измерения и на 40% уменьшить количест- -во экспериментов за счет повышения точности измерения. Формула изобретения Устройство для дилатометрических измерений полимерных материалов, содержащее опорную трубу, расположенный внутри нее передагаций стержень, опирающийся на индикатор положения и соединенный с системой упругих элементов, следящую систему и регистрирующий прибор, отличающееся тем, что, с целью обеспечения возможности проведения термомеханических измерений и повышения точности измерений, оно снабжено электромагнитом, якорь которого соединен с передающим стержнем, а сердечник электромагнита, индикатор положения и система упругих элементов закреплены на подвижном основании следящей системы, соединенном с дополнительно введенным датчиком перемещения. Источники информации Принятые во внимание при экспертизе 1.Михайлов B.C. и др. Установка для проведения дилатометрических испытаний полимеров. - Заводская лаборатория, 1973, 1, с. 95-96. 2.Авторское свидетельство СССР 184486, кл. G 01 N 25/16, 1964.
