Изобретение относится к геофизическому приборостроению, в частности к арретирующим устройствам гиростабилизаторов, используемых при морских гравиметрических съемках.
-Известно арретирующее устройство гироприборов, содержащее силовой привод с кулачком и системой управления, корпус и силовой рычаг с фиксаторами, контактирующими с упругой развязкой IJ.
Однако для данного арретирующего устройства симметричного, расположения упругой развязки относительно, фиксаторов недостаточно, чтобы обеспечить равные усилия на них. При применении устройства в гиростабилиэированном гравиметре для арретирования гироузлов неодинаковые усилия на фиксаторах способствуют уве- , личению дополнительных радиальных нагрузок на ось гироузла,. возникающих от действия самого арретира, которые, воздействуя на подшипники гироузла, увеличивают трение в них, что, в конечном- счете, снижает точность измерений гиростабилизированного гравиметра. Кроме того, такая конструкция арретира н гарантирует
сохранение величины осевой нагрузки на подвес в арретированном состоянии, а изменение нагрузки на подвес меняет свойства подвеса при последующем разарретировании/ что снижает точность гиростабилизатора, а следовательно, и точность измерений гравиметра.
10 Известен также арретир, применяемый для стопорения вращающихся валов, состоящий из упругого хомута, концы которого имеют конические подрезы, гайки с конусной проточкой и
«5 винта, который может вращаться в гнезде направляющей. Арретир управляется ручкой, при вращении которой гайка с конусной проточкой перемещается по винту к центру вала, находит на конические подрезы на концах .хомута, в результате чего щечки хомута плотно обжимают ал 2.
Недостатками такого арретира являются возможность насосной установки
25 хомута относительно вала, а следовательно, возможность появления дополнительных радиальных нагрузок на вал. Кроме того, поскольку внутренняя поверхность хомута выполнена цилиндрической, касание хомута и вала происходит по всей поверхности, что при наличии отклонений формы и расположения сопрягающихся поверхностей хомута и вала может вызвать появление изгибающего момента, воздействующего на вал. При применении арретира для арротирования гироузла гиростабилиэированного гравиметра дополнительные радиальные нагрузки и изгибающий момент воздействуют на подшипники гироузла, увеличивая трение в них, что, в конечном итоге, также снижает точность измерений гиростабилизированного гравиметра.
Цель изобретения - увеличение TO4HoqTH измерения гравиметра путем уменьшения до минимума дополнительных радиальных нагрузок на ось гироузла, возникающих от действия самого арретира в момент арретирования и сохранения нагрузки на подвес гироузла.
Указанная цель достигается тем, что в известный арретир, состоящий из упругого хомута, охватывающего вертикальную ось гироузла, зажимающего устройства, выполненного в виде винта и гайки, взаимодействующей с винтом, и ручки управления, дополнительно введена обойма с полостью, хомут установлен в полости обоймы с возможностью скольжения и притерт к ней, а вертикальная ось гироузла снабжена буртом со сферической боковой поверхностью. Кроме того, арретир дополнительно содержит гайку с левой резьбой, взаимодействующую с винтом, винт снабжен левой и гфавой резьбой,упругий хомут снабжен ушками С горизонтальными пазами,гайки установлены в горизонтальных пазах ушек хомута,причем торцы выступов гаек имеют цилиндрическую поверхность, а ручка управления соединена с винтом через муфту, допускающую угловые перекосы и осевой люфт,
Сущность предлагаемого изобретения состоит .в том, что касание цилиндрического хомута и сферического бурта происходит не по всей поверхности, а по линии. При этом силы давления хомута на бурт даже при наличии отклонения формы хомута и его перекосов всегда направлены нормально к поверхности сферы, т.е. к центру сферы, следовательно, изгибающего момента при взаимодействии сферической боковой поверхности бурт и хомута не возникает. Выполнение хомута скользящим внутри обоймы способствует тому, что горизонтальная составляющая равнодействующей сил давления хомута на бурт, действующая на ось гироузла, а следовательно, и на его подшипники,не превышает сил трения хомута по обойме. Вертикальная составляющая равнодействующей
сил давления- половины хомута на бурт имеет величину
S N sinot-, где N - нормальная сила обжатия
половины хомута;
( - угол перекоса половины хомута.
Сила трения, препятствующая движению гироузла под действием силы ,S и, значит, изменению нагрузки на подвес, равна
FTP. Nf,
где f - коэффициент трения скольжения хомута о бурт.
Из сопоставления равенства следует, что нагрузка на подвесе остается неизменной при условии
sintf i. f
или, учитывая, что речь идет о малых углах для всего хрмута,
Р, 2 f,
где |Ь - угол между двумя перекошенными половинами хомута.
Дополнительные нагрузки на ось гироузла, а значит, и на его подшипники от действия зажимающего устройства не превышает сумму сил трения между его элементами, поскольку межд ними нет жестких связей: ручка управления соединена с винтом через муфту, допускающую угловые перекосы и осевой люфт, а гайки имеют возможность перемещаться относительно хомута.
Сохранение нагрузки на подвес в арретированном состоянии, приводящее к сохранению свойств самого подвеса при последующем разарретировании, и сведение к минимуму дополнительных нагрузок на подшипники гироузла от действия самого арретирующего устройства позволяет повысить точность гиростабилизированного гравиметра.
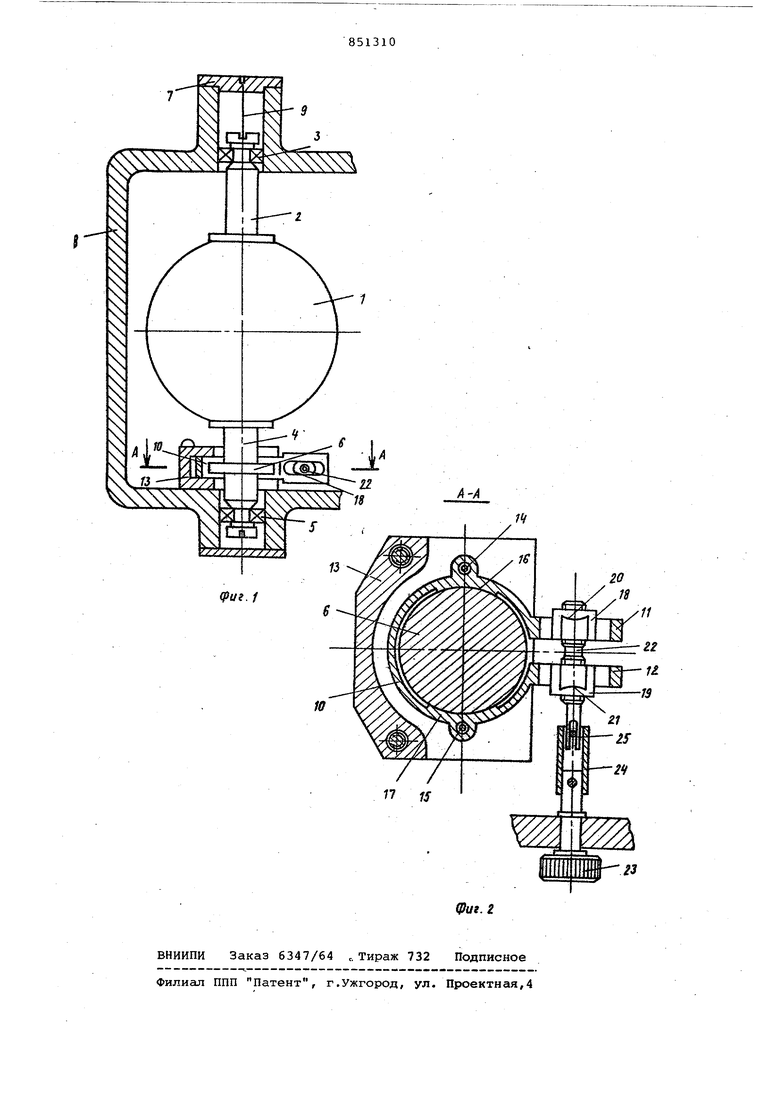
Йа фиг. 1 изображено предлагаемое арретирукяцее устройство с гироузлом; на фиг. 2 - разрез А-А на фиг. 1.
Гироузел включает в себя гиромотор 1/ соединенную с ним верхнюю вертикальную полуось 2 с укрепленным на ней подшипником 3 и нижнюю вертикальную полуось 4 с укрепленным на ней подшипником 5, на которой имеется бурт 6. Гироузел подвешен к крьваке 7 корпуса гироблока 8 на подвесе
Предлагаемое устройство содержит упругий хомут 10 в виде скобы с ушками 11 и 12, который находится в полости обоймы 13 и образует с ней притертую пару. Перемещение хомута 10 ограничивается штифтами 14 и 15, входящими в отверстия в хомуте с зазором. Хомут имеет колодки 16 и 17, зажимающие в арретированном состоянии бурт б на полуоси 4. Поверхность колодок 16 и l7 сопрягающаяся с поверхностью бурта 6, выполнена цилиндрической. Ушки 11 и 12 хомута имеют горизонтальные пазы, в которые вставлены гайки 18 и 19 с правой и левой резьбой (на фиг. 2 показаны н в разрезе). Гайки 18 и 19 давят на ушки хомута цилиндрическими торцами 20 и 21. В гайки 18 и 19 ввинчен ви 22,соединенный сручкой 23 управления посредством муфты 24, в которую конец винта 22 входит с зазором, чт делает возможным угловые перекосы. Наличие на конце винта 22 паза в который входит штифт 25, делает возможным осевой люфт. Муфта 24 может иметь любую другую конструкцию, допускающую угловые перекосы и осевой люфт. Устройство работает следующим образом. При вращении ручки 23 по часовой стрелке ушки 11 и 12 хомута/ на кот рые торцами 20 и 21 давят гайки 18 1 19, сближаются и колодки 16 и 17 хомута обжимают бурт, тормозя враще ние полуоси. При вращении ручки 23 против часовой стрелки гайки 18 и 19 расходятся, ушки хомута благодаря его пружинным свойствам также ра ходятся и между колодками 16 и 17 и буртом 6 образуется зазор, величи на которого зависит от зазора между штифтами 14 и 15, ограничивающими перемещение хомута 10, и отверстиями в хомуте под эти штифты. При это поскольку.в арретированном состоянии нагрузка на подвес не меняется, при последующем разарретировании свойства подвеса остаются неизменны ми. Дополнительная нагрузка на полуось от действия самого арретира в момент арретирования сводится к минимуму, что, в конечном итоге, приводит К повышению точности гиростабилизированного гравиметра. Предлагаемое устройство обеспечивает высокую точность измерений гравиметра путем снижения дополнительных радиальных нагрузок на ось гироузла, возникающих от воздействи самого арретира, которые, воздействуя на подшипники гироузла, увели ивают трение в них, что, в конечном итоге, снижаетточность измерений гиростабилизированного гравиметра. Кроме того, предлагаемое устройство для арретирования сохраняет величину осевой нагрузки на подвес в арретированном состоянии, а значит, сохраняет неизменными свойства подвеса при последующем разарретированин, что позволяет повысить точность гиростабилизатора, а значит, и точность измерений гравиметра. Формула изобретения 1.Устройство для арретировання гироузлов гиростабилизированных гравиметров, содержащее упругий хомут, охватывающий вертикальную ось гироузла, зажимающее устройство, выполненное в виде винта и .гАйки, взаимодействующей с винтом, и ручки управления, отличающееся тем, что, с целью повыиения точности измерения ускорения силы тяжести, в него дополнительно введена обойма с полостью, хомут установлен в полости обоймы с возможностью скольжбния и притерт к ней, а вертикальная ось гироузла снабжена буртом со сферической боковой поверхностью. 2.Устройство по п. I, отличающееся тем, что оно дополнительно содержит гайку с левой резьбой, взаимодействующую с винтом, винт снабжен левой и правой резьбой, упругий хомут снабжен ушками с горизонтальными пазами, гайки установлены в горизонтальных пазах ушек хомута, причем торцы выступов гаек имеют цилиндрическую поверхность, а ручка управления соединена с винтом через муфту, допускающую угловые перекосы и осевой люфт. Источники информации, во внимание при экспертизе 1.Авторское свидетельство СССР 477303, кл. G 01 С 19/26, 1967. 2.Чурабо Д.Д. Детали и узлы приборов. М., 1961, с. 403 (прототип) .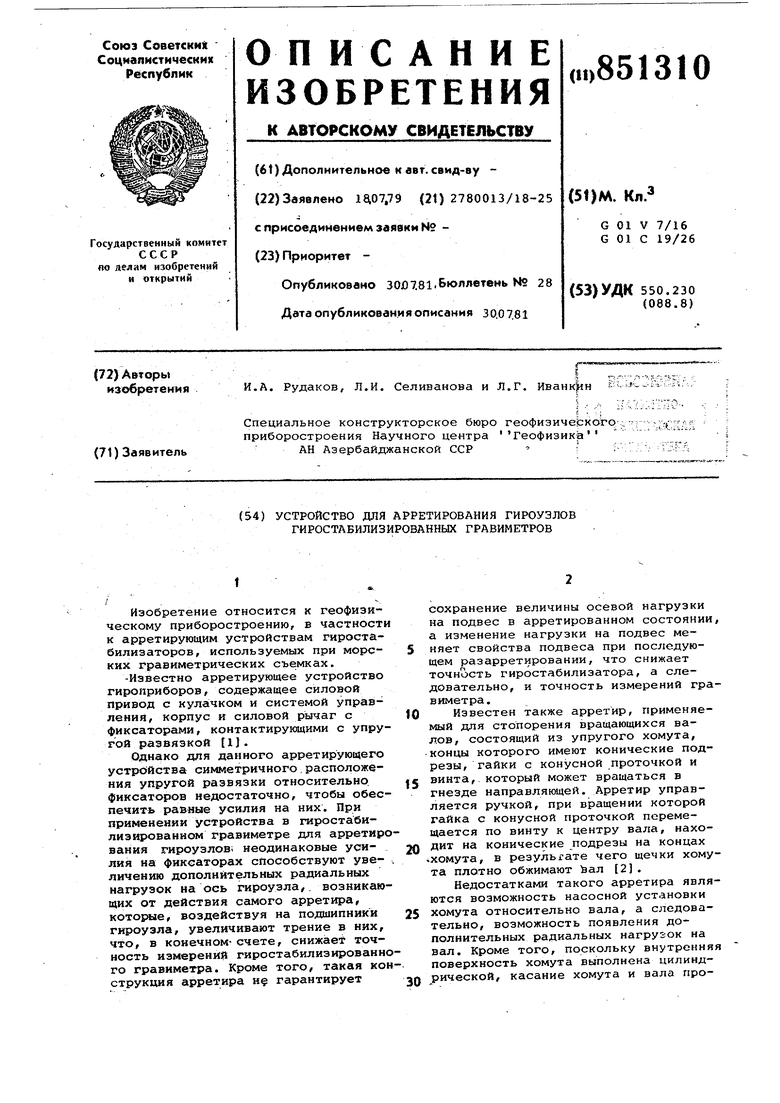
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Комбинированная система ориентации и навигации подвижного объекта | 2020 |
|
RU2746236C1 |
| УСТРОЙСТВО АРРЕТИРОВАНИЯ РОТОРА ЭЛЕКТРОДВИГАТЕЛЯ-МАХОВИКА В МАГНИТНОМ ПОДВЕСЕ | 2016 |
|
RU2645023C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР (ВАРИАНТЫ) | 1998 |
|
RU2155324C1 |
| Гравиметр | 1986 |
|
SU1428046A1 |
| СПОСОБ ЗАПУСКА ГИРОСКОПИЧЕСКОГО ПРИБОРА С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189013C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189011C1 |
| ДАТЧИК ЗЕНИТНОГО И АЗИМУТАЛЬНОГО УГЛОВ | 1991 |
|
RU2026975C1 |
| СПОСОБ ВЗВЕДЕНИЯ ПРУЖИНЫ ГИРОМОТОРА | 2001 |
|
RU2189012C1 |