Демонстрационный гиростабилизатор (ДГС) относится к учебным приборам, с помощью которого можно демонстрировать особенности работы различных типов одноосных гиростабилизаторов.
Известен одноосный силовой гиростабилизатор (ОСГС) (Пельпор Д.С. Гироскопические системы. Ч.1. «Теория гироскопов и гироскопических стабилизаторов», с.282, рис.РВ.1.), состоящий из гироблока и наружной рамы, которая и выполняет роль стабилизируемой платформы, на оси подвеса гироблока расположен датчик угла, сигнал с которого через усилитель напряжения, корректирующее звено и усилитель мощности поступает на стабилизирующий мотор, который через редуктор связан с осью подвеса платформы, на которой располагается объект стабилизации и чувствительный элемент системы коррекции, сигнал с которого идет на коррекционный мотор, расположенный на оси подвеса гироблока.
Недостатком одноосного силового гиростабилизатора является невозможность построения и демонстрации работы индикаторно-силового и индикаторного гиростабилизаторов.
Известен также одноосный индикаторно-силовой гиростабилизатор (Сломянский Г.А., Прядилов Ю.Н. Поплавковые гироскопы и их применение. М.: Оборонгиз, 1958, стр.47-49, фиг.1.20) на базе поплавкового интегрирующего гироскопа (ПИГ), состоящий из стабилизируемой платформы, на которой расположен ПИГ таким образом, что входная ось параллельна оси стабилизации, датчик угла, расположенный на оси подвеса поплавка, через усилитель напряжения, корректирующее устройство, усилитель мощности связан со стабилизирующим мотором, который через редуктор приводит в движение платформу.
Недостатком одноосного индикаторно-силового гиростабилизатора (ОИСГС) является невозможность демонстрации работы силового и индикаторного гиростабилизаторов.
В качестве прототипа выбран ОИГС (МПК G01C 19/44. Патент РФ 2117915. Индикаторный гиростабилизатор / Кривошеев С.В., Фрейман Э.В. и др. // БИ 1998, №23).
Гиростабилизатор состоит из платформы в одноосном подвесе, с осью которой кинематически связан стабилизирующий мотор, установленного на платформе трехстепенного гироскопа с датчиками угла и датчиками момента по каждой оси его подвеса, причем один из датчиков угла через усилитель арретирования подключен к соответствующему датчику момента, датчик угла, установленный на оси, параллельной оси подвеса платформы, подключен к одному из входов усилителя стабилизации, выход которого соединен с обмоткой управления стабилизирующего мотора, а усилитель стабилизации содержит последовательно включенные предварительный усилитель, фазочувствительный выпрямитель, усилитель напряжения и усилитель мощности, при этом в усилителе стабилизации между фазочувствительный выпрямителем и усилителем напряжения введен сумматор, а последовательно обмотке управления стабилизирующего мотора подключен резистор, который по типу положительной обратной связи через дополнительно введенный масштабный усилитель подключен к неинвертирующему входу сумматора, инвертирующий вход которого соединен с выходом фазочувствительного выпрямителя, при этом коэффициент передачи масштабного усилителя определяется из соотношении
((N-1)r+Nr1)/NSr1,
где N - коэффициент повышения статической точности и демпфирования относительно оси подвеса платформы;
r, r1 - активные сопротивления обмотки управления стабилизирующего мотора и резистора;
S - коэффициент усиления от точки подключении масштабного усилители к усилителю стабилизации до его выхода.
Недостатком прототипа является невозможность демонстрации его в качестве силового и индикторно-силового гиростабилизаторов.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в расширении демонстрационных возможностей демонстрационного гиростабилизатора.
Технический результат достигается тем, что в демонстрационный гиростабилизатор, построенный на базе индикаторного гиростабилизатора, содержащего трехстепенной гироскоп, состоящий из гироузла, который включает в себя гиромотор и внутреннюю раму, на полуосях которого расположен первый датчик угла, подключенный к последовательно соединенным первому предварительному усилителю и первому фазочувствительному выпрямителю и первый датчик момента, соединенный с усилителем мощности первого датчика моментов, наружной рамы, на соответствующей полуоси подвеса которой расположен второй датчик угла, подключенный через второй предварительный усилитель к входу второго фазочувствительного выпрямителя, и второй датчик моментов, подключенный к выходу усилителя напряжения канала электрического арретирования, при этом трехстепенной гироскоп установлен на стабилизируемой платформе, с полуосями которой кинематически связаны системный датчик угла и стабилизирующий мотор, вход которого через последовательно соединенные усилитель мощности и усилитель напряжения в канале стабилизации подключен к выходам первого-четвертого корректирующих звеньев, введены пульт управления, задающий режимы демонстрации и величину кинетического момента гироскопа, логическое устройство, которое состоит из семи управляемых коммутаторов и компаратора, арретира, установленного на стабилизируемой платформе, вход которого соединен с выходом седьмого коммутатора, первый управляемый вход которого подключен к седьмому выходу пульта управления, а второй управляемый вход - к выходу компаратора, вход которого одновременно соединен с входом усилителя мощности первого датчика моментов и с сигнальным выходом шестого коммутатора, управляемый вход которого подключен к шестому выходу пульта управления, а сигнальный вход - одновременно к выходу второго фазочувствительного усилителя и к сигнальному входу четвертого коммутатора, управляемый вход которого соединен с четвертым выходом пульта управления, а сигнальный выход - с входом четвертого корректирующего звена; выход первого фазочувствительного усилителя подключен одновременно к сигнальным входам первого, второго, третьего и пятого коммутаторов, при этом сигнальные выходы первого, второго, третьего и пятого коммутаторов подключены соответственно к входам усилителя напряжения канала электрической пружины ДУС, дифференцирующего звена и одновременно второго корректирующего звена, третьего корректирующего звена и усилителю напряжения канала электрического арретирования, а управляемые входы первого, второго, третьего и пятого коммутаторов подключены соответственно к первому, второму, третьему и пятому выходам пульта управления, восьмой выход которого подключен к обмоткам статора гиромотора, причем выход дифференцирующего звена через усилитель напряжения канала формирования демпфирования совместно с выходом усилителя напряжения канала электрической пружины и задатчика канала управления стабилизируемой платформой подключены к входу усилителя мощности первого датчика моментов, при этом одновременно выход усилителя напряжения канала электрической пружины соединен с входом первого корректирующего звена.
Сущность изобретения поясняется чертежами, представленными на фиг.1-2. На фиг.1 представлена кинематическая схема прибора, на которой приняты следующие обозначения:
1 - гироузел (внутренняя рама с гиромотором);
1а - гиромотор - управляемый электрический двигатель с управляемой величиной кинетического момента (питание подается на обмотки статора);
1б - внутренняя рама;
2, 3 - полуоси подвеса гироузла;
4 - первый датчик момента (ДМ1);
5 - первый датчик угла (ДУ1);
6 - наружная рама;
7, 8 - полуоси подвеса наружной рамы;
9 - второй датчик угла (ДУ2);
10 - второй датчик момента (ДМ2);
11 - арретир наружной рамы (HP) гироскопа, например электромагнит (ЭМ), который арретирует HP при обесточивании ЭМ за счет наличия механической пружины;
12 - стабилизируемая платформа;
13, 14 - полуоси подвеса платформы;
15 - системный датчик угла (ДУЗ платформы);
15а - датчик угла, регистрирующий положение ПП 17 относительно корпуса;
16 - стабилизирующий мотор (безредукторный вариант);
17 - подвижная платформа (ПП) имитирует движение объекта;
18 - ось вращения ПП;
19 - редуктор;
20 - двигатель поворота ПП;
21 - пульт управления демонстрационным гироскопом (логическим устройством 34, вращением ПП и вращением гиромотора);
22 - первый предварительный усилитель;
23 - второй предварительный усилитель;
24 - первый фазочувствительный выпрямитель (ФЧВ);
25 - второй фазочувствительный выпрямитель (ФЧВ);
26 - усилитель напряжения канала электрической пружины ДУС;
27 - задатчик канала управления стабилизируемой платформой;
28 - усилитель напряжения канала электрического арретирования вектора  (оси ротора гиромотора);
(оси ротора гиромотора);
29 - усилитель напряжения канала стабилизации;
30 - усилитель напряжения канала формирования демпфирования ИГ;
31 - усилитель мощности первого датчика моментов (в каналах обратных связей ДУС и ИГ);
32 - усилитель мощности в канале стабилизации;
33 - дифференцирующее звено, например, операционный усилитель с конденсатором, подключенным на инвертирующий вход, куда одновременно подключен резистор цепи обратной связи;
34 - логическое устройство выбора типа стабилизатора (состав см. пояснения к фиг.2);
35 - первое корректирующее звено (КЗ) ОИСГС, построенного на датчике угловых скоростей (ДУС) - первое корректирующее звено;
36 - корректирующее звено ОИСГС, построенного на интегрирующем гироскопе (ИГ) - второе корректирующее звено;
37 - корректирующее звено ОСГС, построенного на двухстепенном силовом гироблоке СГБ - третье корректирующее звено;
38 - корректирующее звено ОИГС, построенного на трехстепенном гироскопе (ТСГ) - четвертое корректирующее звено.
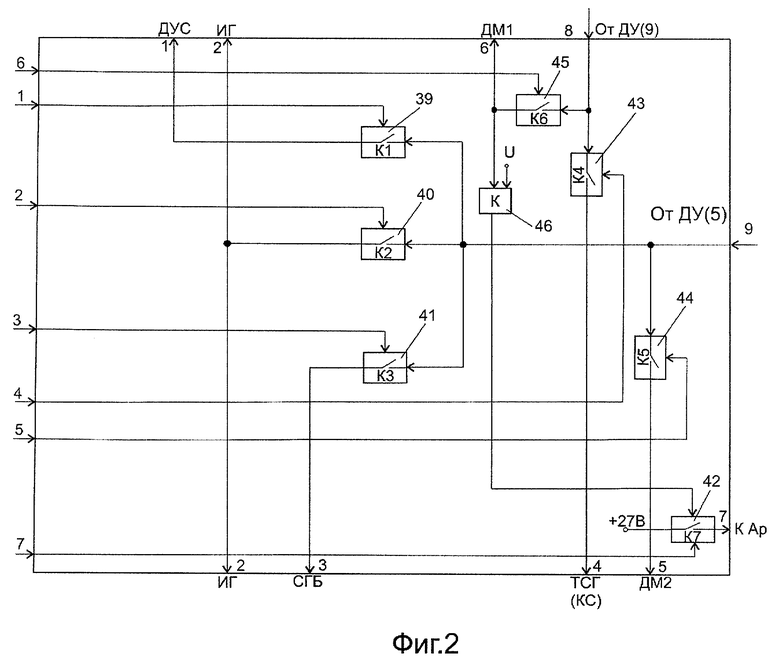
На фиг.2 представлена блок-схема логического устройства, на которой приняты следующие обозначения:
39 - управляемый коммутатор (К1) режима ИСГС на базе ДУС;
40 - управляемый коммутатор (К2) режима ИСГС на базе ПИГ;
41 - управляемый коммутатор (К3) режима СГС на базе СГБ;
42 - управляемый коммутатор (К7) режима арретирования;
43 - управляемый коммутатор (К4) режима ИГС на базе ТСГ;
44 - управляемый коммутатор (К5) коррекционного мотора 10 в режиме ИГС на базе ТСГ;
45 - управляемый коммутатор (К6) режима приведения наружной рамы ТСГ в нулевое положение, необходимое для правильного арретирования;
46 - компаратор, выдающий управляющий сигнал на коммутатор 42 для управления арретиром 11.
Описание входов и выходов ЛУ34 в соответствии с фиг.2.
Входы ЛУ:
первый вход - управляемый вход управляемого коммутатора 39;
второй вход - управляемый вход управляемого коммутатора 40;
третий вход - управляемый вход управляемого коммутатора 41;
четвертый вход - управляемый вход управляемого коммутатора 43;
пятый вход - управляемый вход управляемого коммутатора 44;
шестой вход - управляемый вход управляемого коммутатора 45;
седьмой вход - первый управляемый вход управляемого коммутатора 42 (второй управляемый вход является выходом компаратора 46);
восьмой вход - сигнальные входы управляемых коммутаторов 43 и 45;
девятый вход - сигнальные входы управляемых коммутаторов 39, 40, 41 и 44.
Выходы ЛУ:
первый выход - сигнальный выход управляемого коммутатора 39;
второй выход - сигнальный выход управляемого коммутатора 40;
третий выход - сигнальный выход управляемого коммутатора 41;
четвертый выход - сигнальный выход управляемого коммутатора 43;
пятый выход - сигнальный выход управляемого коммутатора 44;
шестой выход - сигнальный выход управляемого коммутатора 45;
седьмой выход - сигнальный выход управляемого коммутатора 42.
Поворотная платформа может вращаться по одному из следующих законов:
ψo=K1t - равномерное вращение;
ψo=K2t2 - равноускоренное вращение;
ψo=αmsinωt - колебательное движение (аналогично испытанию на синусном стенде).
ДГС состоит из гироузла 1, включающего в себя гиромотор 1а и внутреннюю раму 1б, который с помощью полуосей 2 и 3 кинематически соединен с наружной рамой 6. На полуоси 3 расположен ротор первого датчика угла 5, который через предварительный усилитель 22, фазочувствительный выпрямитель 24, соответствующие элементы (коммутаторы) логического устройства 34, в зависимости от режима работы, подключается либо только на стабилизирующий мотор 16 (через последовательно соединенные усилитель напряжения канала стабилизации 29 и усилитель мощности в канале стабилизации 32), либо еще и на первый датчик момента 4 (через усилитель мощности первого датчика моментов и подключенные к нему элементы, входы которых соединены с первым, вторым или шестым выходами ЛУ 34), расположенный на полуоси 2 подвеса гироузла 1. Наружная рама 6 с помощью полуосей 7, 8 кинематически соединяется со стабилизируемой платформой 12. На полуоси 7 расположен ротор второго датчика угла 9, который через предварительный усилитель 23, фазочувствительный выпрямитель 25, восьмой вход логического устройства 34, корректирующее звено ИГС 38, усилитель напряжения 29 и усилитель мощности 32 подключается к стабилизирующему мотору 16, у которого ротор кинематически соединен с полуосью 14 подвеса платформы 12, а статор - с подвижной платформой 17. На полуоси 8 расположен второй датчик 10, ротор которого кинематически соединен непосредственно с полуосью 8, а статор - со стабилизируемой платформой 12. Вход датчика момента 10 соединен с логическим устройством 34 (пятый выход) через усилитель напряжения 28. Стабилизируемая платформа 12 кинематически соединена с подвижной платформой 16 с помощью полуосей 13 и 14, полуось 13 кинематически соединена с ротором третьего датчика угла 15, статор которого кинематически соединяется с подвижной платформой 17. Для переключения режимов работы, задания определенной скорости вращения гиромотора и вращения подвижной платформы имеется пульт управления 21. На выходе 8 пульта управления формируется питание гиромотора 1а за счет изменения частоты и напряжения, которое позволяет получать заданное значение кинетического момента. Выход 9 пульта управления 21 соединен с двигателем 20, обеспечивающим разные законы движения платформы 17, который через редуктор 19 кинематически соединен с осью вращения 18 подвижной платформы 17, с которой кинематически связан четвертый датчик угла 15а. Со стабилизируемой платформой жестко связан арретир 11, вход которого соединен с седьмым выходом логического устройства 34 - выходом коммутатора 42, первый управляющий вход которого через седьмой вход логического устройства 34 соединен с седьмым выходом пульта управления 21 (цепь разарретирования). Цепь арретирования наружной рамки 6 формируется следующим образом: второй датчик угла 9, восьмой вход логического устройства 34, сигнальные вход-выход коммутатора 45, вход компаратора 46, выход которого соединен с вторым управляющим входом коммутатора 42, сигнальный выход которого подключен на вход арретира 11. На фиг.2 представлена схема логического устройства 34. Выход 1 пульта управления 21 соединен с управляющим входом коммутатора 39, сигнальный вход которого подключен к выходу фазочувствительного выпрямителя 24, а выход соединен с входом усилителя напряжения 26, выход которого одновременно подключен к входам усилителя мощности 31 и корректирующего звена 35. Выход 2 пульта управления 21 соединен с управляющим входом коммутатора 40, сигнальный вход которого подключен к выходу фазочувствительного выпрямителя 24, а выход соединен с входом корректирующего звена 36 и входом дифференцирующего звена 33. Выход 3 пульта управления 21 соединен с управляющим входом коммутатора 41, сигнальный вход которого подключен к выходу фазочувствительного выпрямителя 25, а выход соединен с корректирующим звеном 37. Выход 4 пульта управления 21 соединен с управляющим входом коммутатора 43, сигнальный вход которого подключен к выходу фазочувствительного выпрямителя 24, а выход соединен с корректирующим звеном 38. Выход 5 пульта управления соединен с управляющим входом коммутатора 44, сигнальный вход которого подключен к выходу фазочувствительного выпрямителя 25, а выход соединен с входом усилителя напряжения 28. Выход 6 пульта управления 21 соединен с управляющим входом коммутатора 45, сигнальный вход которого подключен к выходу фазочувствительного выпрямителя 25, а выход соединен с входом усилителя мощности 31 и входом компаратора 46. Выход 7 пульта управления 21 соединен с первым управляющим входом коммутатора 42, второй управляющий вход которого подключен к выходу компаратора 46. Сигнальный вход коммутатора 42 соединен с источником постоянного тока, напряжением 27 B, а выход подключен к арретиру 11.
Предлагаемый демонстрационный гиростабилизатор может работать в следующих режимах:
Режим I. Одноосный индикаторно-силовой гиростабилизатор (ОИСГС) на базе датчика угловой скорости (ДУС);
Режим II. Одноосный индикаторно-силовой гиростабилизатор (ОИСГС) на базе интегрирующего гироскопа (ИГ);
Режим III. Одноосный силовой гиростабилизатор (ОСГС) на базе силового гироблока (СГБ);
Режим IV. Одноосный индикаторный гиростабилизатор (ОИГС) на базе трехстепенного гироскопа(ТСГ).
Режимы гиростабилизатора формируются путем:
1) Изменения величины кинетического момента ротора гиромотора.
2) Превращения гироскопа в двухстепенной или трехстепенной.
3) Изменения закона управления датчиком момента 4 в двухстепенном гироскопе.
Режим I. ОИСГС, построенный на базе ДУСа.
На управляющем входе 1 коммутатора 42 сигнал отсутствует, следовательно, шток арретира выдвинут и наружная рама 6 3-степенного гироскопа жестко связана со стабилизируемой платформой 12, т.е. заарретирована.
Для того чтобы стабилизатор работал в режиме ОИСГС, необходимо:
1. Создать соответствующий кинетический момент H гироскопа (у ДУСа Н обычно небольшой - десятки или единицы сотен гсмс);
2. Организовать цепь электрической пружины, т.е. превратить функционально двухстепенной гироскоп в ДУС;
3. Подать сигнал, пропорциональный угловой скорости, в контур стабилизации.
1. Задание кинетического момента гиромотора.
На пульте управления 21 формируется питание, которое с выхода 8 поступает на гиромотор 1а, позволяющее получить заданное значение кинетического момента, например, H=100 гсмс или H=200 гсмс.
2. Формирование цепи электрической пружины ДУС.
После того как гиромотор наберет номинальные обороты (определяем по значению тока), с первого выхода пульта управления 21 подаем сигнал на управляющий вход коммутатора 39, при этом контакт К1 замыкается и сигнал с ДУ 5, через предварительный усилитель 22, фазочувствительный выпрямитель 24 (девятый вход ЛУ 34), сигнальные вход-выход коммутатора 39, первый выход ЛУ 34, усилитель напряжения 26 поступает через усилитель мощности 31 на ДМ 4 (организована цепь электрической пружины). Выходной сигнал ДУС снимается по току с выхода усилителя 26.
3. Формирование контура разгрузки.
После срабатывания коммутатора 39 контур разгрузки формируется аналогично контуру электрической пружины: сигнал с ДУ 5, через предварительный усилитель 22, фазочувствительный выпрямитель 24 (девятый вход ЛУ 34), сигнальные вход-выход коммутатора 39, первый выход ЛУ 34, усилитель напряжения 26 поступает на корректирующее звено 35, усилитель напряжения 29, усилитель мощности 32 и далее на стабилизирующий мотор 16, который создает момент по оси подвеса платформы 12, направленный в противоположную сторону возмущающему моменту, в результате чего платформа 12 остается неподвижной относительно инерциального пространства.
4. Демонстрация работы.
4а. Описание работы контура разгрузки.
С пульта управления 21 (выход 9) подается питание (изменяющееся по заданному закону) на двигатель 20, который через редуктор 19 связан с осью вращения поворотной платформы 17, которая начнет вращаться. Так как в подшипниках полуосей подвеса 13 и 14 имеется трение, то платформа 17 начнет увлекать за собой стабилизируемую платформу 12 с некоторой угловой скоростью. При этом возникнет гироскопический момент вокруг оси подвеса гироузла и гироузел начнет вращаться с некоторой угловой скоростью.
Гироскопический момент, возникающий при вращении гироузла, в силу незначительного кинетического момента мал и не играет существенной роли в компенсации внешних воздействий. Одновременно гироузел повернется на угол, пропорциональный угловой скорости. Возникший сигнал датчика угла 5 через предварительный усилитель 22, фазочувствительный выпрямитель 24, логическое устройство 34 (замкнутый контакт К1), усилитель 26, корректирующее звено 35, усилитель напряжения 29, усилитель мощности 32 поступает на стабилизирующий мотор 16, который создает момент по оси подвеса стабилизируемой платформы 12, которая начнет вращаться с угловой скоростью, равной, но противоположно направленной угловой скорости ПП 17, в результате чего платформа 12 остается неподвижной относительно инерциального пространства (в нашем случае можно считать - относительно основания).
При этом параметры корректирующего звена 35 выбираются таким образом, чтобы гироскопический момент, действующий по оси подвеса платформы 12, не достигал значительной величины. Иначе полуоси 2 и 3 могут деформироваться.
4б. Получение демонстрационного эффекта без придания вращения платформе.
Прежде чем вращать ПП 17, следует показать влияние типов корректирующих звеньев и их параметров на устойчивость и качество работы ГС. При этом вращение ПП 17 не задается, а оценка осуществляется по сигналам датчиков углов 5 и 15.
4в. Получение демонстрационного эффекта при вращении платформы.
Последовательно задать три типа движения платформы, описанные выше.
С датчиков угла 15 и 15а сигнал выводится на двулучевой осциллограф, в результате чего мы можем наблюдать за изменением показаний датчиков углов при вращении платформы 17 и оценить точность стабилизации.
После того как демонстрация окончена, отключаем вращение платформы и приводим устройство в исходное положение.
Режим II. ОИСГС, построенный на ИГ.
Для того чтобы стабилизатор работал в режиме ОИСГС, необходимо:
1. Создать соответствующий кинетический момент Н гироскопа (у ИГ Н обычно тысяча гсмс);
2. Организовать канал формирования демпфирования, т.е. превратить функционально двухстепенной гироскоп в ИГ;
3. Подать сигнал, пропорциональный углу поворота гироузла, в контур стабилизации.
1. Задание кинетического момента гиромотора.
На пульте управления 21 формируется питание, которое с выхода 8 поступает на гиромотор 1а, позволяющее получить заданное значение кинетического момента, например, Н=1000 гсмс или Н=500 гсмс.
2. Формирование канала демпфирования ИГ.
После того как гиромотор наберет номинальные обороты (определяем по значению тока), со второго выхода пульта управления 21 подаем сигнал на управляющий вход коммутатора 40, при этом контакт К2 замыкается и сигнал с ДУ 5 через предварительный усилитель 22, фазочувствительный выпрямитель 24 (девятый вход ЛУ 34), сигнальные вход-выход коммутатора 40, второй выход ЛУ 34, дифференцирующее звено 33, усилитель напряжения 30 поступает через усилитель мощности 31 на ДМ 4, который создает момент, эквивалентный моменту вязкого трения (организован канал демпфирования).
3. Формирование контура разгрузки.
После срабатывания коммутатора 40 контур разгрузки формируется по следующей схеме: сигнал с ДУ 5 через предварительный усилитель 22, фазочувствительный выпрямитель 24 (девятый вход ЛУ 34), сигнальные вход-выход коммутатора 40, второй выход ЛУ 34 поступает на корректирующее звено 36, усилитель напряжения 29, усилитель мощности 32 и далее на стабилизирующий мотор 16, который создает момент по оси подвеса платформы 12, направленный в противоположную сторону возмущающему моменту, в результате чего платформа 12 остается неподвижной относительно инерциального пространства.
4. Демонстрация работы.
4а. Описание работы контура стабилизации.
С пульта управления 21 (выход 9) подается питание (изменяющееся по заданному закону) на двигатель 20, который через редуктор 19 связан с осью вращения поворотной платформы 17, которая начнет вращаться. Так как в подшипниках полуосей подвеса 13 и 14 имеется трение, то платформа 17 начнет увлекать за собой стабилизируемую платформу 12 с некоторой угловой скоростью. При этом возникнет гироскопический момент вокруг оси подвеса гироузла и он повернется на угол, пропорциональный углу поворота ПП 17 (момент гироскопический уравновешивается моментом электрического демпфирования). Возникший сигнал датчика угла 5 через предварительный усилитель 22, фазочувствительный выпрямитель 24, логическое устройство 34 (замкнутый контакт К2), корректирующее звено 36, усилитель напряжения 29, усилитель мощности 32 поступает на стабилизирующий мотор 16, который создает момент по оси подвеса стабилизируемой платформы 12, которая начнет вращаться с угловой скоростью, равной, но противоположно направленной угловой скорости ПП 17, в результате чего платформа 12 остается неподвижной относительно инерциального пространства (в нашем случае можно считать - относительно основания).
Так же как и при ДУСе, цепь стабилизации не позволяет развить значительные скорости прецессии по оси подвеса гироузла.
4б. Получение демонстрационного эффекта без придания вращения платформе.
Прежде чем вращать ПП 17, следует показать влияние типов корректирующих звеньев и их параметров на устойчивость и качество работы ГС. При этом вращение ПП 17 не задается, а оценка осуществляется по сигналам датчиков углов 5 и 15.
4в. Получение демонстрационного эффекта при вращении платформы.
Последовательно задать три типа движения платформы описанные выше. С датчиков угла 15 и 15а сигналы выводятся на двулучевой осциллограф, в результате чего мы можем наблюдать за изменением показаний датчиков углов при вращении платформы 17 и оценить точность стабилизации.
После того как демонстрация окончена, отключаем вращение платформы и приводим устройство в исходное положение.
Режим III. ОСГС, построенный на СГБ.
Для того чтобы стабилизатор работал в режиме ОСГС, необходимо:
1. Создать соответствующий кинетический момент Н гироскопа (у СГБ Н обычно несколько тысяч гсмс);
2. Отключить цепь обратной связи на датчик моментов 4 гироузла 1;
3. Подать сигнал, пропорциональный углу поворота гироблока, в контур стабилизации.
1. Задание кинетического момента гиромотора.
На пульте управления 21 формируется питание, которое с выхода 8 поступает на гиромотор 1а, позволяющее получить заданное значение кинетического момента, например Н=2000 гсмс или Н=4000 гсмс.
2. Формирование контура стабилизации.
После того как гиромотор наберет номинальные обороты (определяем по значению тока), с третьего выхода пульта управления 21 подаем сигнал на управляющий вход коммутатора 41, при этом контакт К3 замыкается и сигнал с ДУ 5 через предварительный усилитель 22, фазочувствительный выпрямитель 24 (девятый вход ЛУ 34), сигнальные вход-выход коммутатора 41, третий выход ЛУ 34 поступает на корректирующее звено 37, усилитель напряжения 29, усилитель мощности 32 и далее на стабилизирующий мотор 16, который создает момент по оси подвеса платформы 12, направленный в противоположную сторону возмущающему моменту.
4. Демонстрация работы.
4а. Описание работы контура СГС.
С пульта управления 21 (выход 9) подается питание (изменяющееся по заданному закону) на двигатель 20, который через редуктор 19 связан с осью вращения поворотной платформы 17, которая начнет вращаться. Так как в подшипниках полуосей подвеса 13 и 14, токоподводах имеется трение, то относительно оси подвеса стабилизируемой платформы 12 возникнет возмущающий момент. При этом гироузел начнет прецессировать и возникнет гироскопический момент вокруг оси подвеса стабилизируемой платформы, который в отличие от предыдущих двух схем достигает существенной величины. Возникший в результате прецессии сигнал датчика угла 5 через предварительный усилитель 22, фазочувствительный выпрямитель 24, логическое устройство 34 (замкнутый контакт К3), корректирующее звено 37, усилитель напряжения 29, усилитель мощности 32 поступает на стабилизирующий мотор 16, который создает момент по оси подвеса платформы 12, направленный в противоположную сторону возмущающему моменту, в результате чего платформа 12 остается неподвижной относительно инерциального пространства. С датчиков угла 15 и 15а сигнал выводится на двулучевой осциллограф, в результате чего мы можем наблюдать за изменением показаний при вращении платформы 17. После того как демонстрация окончена, отключаем вращение платформы, размыкаем управляемый коммутатор 41, отключив подачу сигнала на его управляющий вход.
4б. Получение демонстрационного эффекта без придания вращения платформе.
Прежде чем вращать ПП 17, следует показать влияние типов корректирующих звеньев и их параметров на устойчивость и качество работы ГС. При этом вращение ПП 17 не задается, а оценка осуществляется по сигналам датчиков углов 5 и 15.
4в. Получение демонстрационного эффекта при вращении платформы.
Последовательно задать три типа движения платформы, описанные выше.
С датчиков угла 15 и 15а сигнал выводится на двулучевой осциллограф, в результате чего мы можем наблюдать за изменением показаний датчиков углов при вращении платформы 17 и оценить точность стабилизации.
После того как демонстрация окончена, отключаем вращение платформы и приводим устройство в исходное положение.
Режим IV. ОИГС, построенный на базе ТСГ.
1. Задание кинетического момента гиромотора.
На пульте управления 21 формируется питание, которое с выхода 9 поступает на гиромотор 1а, позволяющее получить заданное значение кинетического момента, например, Н=1000 гсмс, после того как гиромотор наберет номинальные обороты (определяем по значению тока), производим следующие переключения.
2. Разарретирование наружной рамы.
Для того чтобы перейти в режим работы ИГС, построенного на базе ТСГ, необходимо разарретировать наружную раму 6. Для этого с выхода 7 пульта управления 21 подаем питание на первый управляющий вход коммутатора 42, в результате чего контакт К7 замыкается и питание подается на арретир 11, после чего его шток втягивается в электромагнит арретира и освобождает наружную раму 6.
3. Электрическое арретирование гироузла относительно наружной рамки.
С выхода 5 пульта управления 21 подается питание на управляющий вход коммутатора 44, в результате чего контакт К5 замыкается и сигнал с датчика угла 5 через электронные блоки 22, 24 и 28 поступает на вход датчика моментов 10, момент которого обеспечивает перпендикулярность вектора кинетического момента Н оси подвеса наружной рамки 6.
4. Формирование контура индикаторной стабилизации.
Одновременно с выхода 4 пульта управления 21 подается питание на управляющий вход коммутатора 43, в результате чего контакт К4 замыкается и сигнал рассогласования со второго датчика угла 9 через предварительный усилитель 23, фазочувствительный выпрямитель 25, логическое устройство 34 (вход 8 и замкнутый контакт К4 коммутатора 43), корректирующее звено 38, усилитель напряжения 29, усилитель мощности 32 поступает на стабилизирующий мотор 16, в результате чего формируется цепь ИГС, построенного на базе ТСГ.
5. Демонстрация работы.
5а. Описание работы контура ИГС.
С пульта управления 21 (выход 8) подается питание (изменяющееся по заданному закону) на двигатель 20, который через редуктор 19 связан с осью вращения поворотной платформы 17, которая начнет вращаться. Так как в подшипниках полуосей подвеса 13 и 14 имеется трение, то платформа 17 увлечет за собой стабилизируемую платформу 12 и статор датчика угла 9. Возникший сигнал рассогласования со второго датчика угла 9 через предварительный усилитель 23, фазочувствительный выпрямитель 25, логическое устройство 34 (замкнутый контакт К4), корректирующее звено 38, усилитель напряжения 29, усилитель мощности 32 поступает на стабилизирующий мотор 16, который создает момент по оси подвеса стабилизируемой платформы 12, направленный в противоположную сторону возмущающему моменту, в результате чего платформа 12 остается неподвижной относительно инерциального пространства с точностью до динамических ошибок.
5б. Получение демонстрационного эффекта без придания вращения платформе.
Аналогично, как при и демонстрации предыдущих типов ГС, следует показать влияние типов корректирующих звеньев и их параметров на устойчивость и качество работы ГС. При этом вращение ПП 17 не задается, а оценка осуществляется по сигналам датчиков углов 5 и 9.
5в. Получение демонстрационного эффекта при вращении платформы.
Последовательно задать три типа движения платформы, описанные выше.
С датчиков угла 15 и 15а сигнал выводится на двулучевой осциллограф, в результате чего мы можем наблюдать за изменением показаний датчиков углов при вращении платформы 17 и оценить точность стабилизации.
После того как демонстрация окончена, отключаем вращение платформы и приводим устройство в исходное положение.
Приведение демонстрационного устройства в исходное положение.
Исходным положением устройства является зааретированное состояние трехстепенного гироскопа, которое является начальным для демонстрации режимов ОИСГС или ОСГС. Для этого необходимо с выхода 6 пульта управления 21 подать напряжение на 6-ой вход ЛУ 34, т.е. на управляющий вход коммутатора 45, который срабатывает (замыкается контакт К6). При этом сигнал со второго датчика угла 9 поступает через предварительный усилитель 23, фазочувствительный выпрямитель 25 на ЛУ 34 (восьмой вход), откуда через контакт К6 на выход 6 ЛУ 34 усилитель мощности 31 поступает на первый датчик момента 4, который создаст момент по оси подвеса гироузла, в результате чего, по правилу прецессии, начнет вращаться наружная рама 6. Когда наружная рама займет относительно платформы нужное положение (например, параллельное стабилизируемой платформе), сигнал рассогласования со второго датчика угла 9 достигнет заданного значения, которое превысит опорное напряжение Uоп компаратора 46, он сработает и выдаст сигнал на второй управляющий вход коммутатора 42. При этом контакт К7 разомкнется и обмотка арретира 11 обесточится (например, будет снято напряжение +27 B). При этом шток арретира 11 под действием механической пружины выдвинется в отверстие наружной рамы 6 и заарретирует ее. Теперь прекращаем подачу питания на управляющий вход коммутатора 45 и отключаем питание гиромотора.
Управления стабилизируемой платформой.
Для управления платформой необходимо подать сигнал на первый датчик момента 4, для этого с задатчика 27 подаем сигнал через усилитель мощности 31 на датчик момента 4. Сигнал подается до тех пор, пока стабилизируемая платформа 12 не займет нужное положение. Сигнал с задатчика подается только при включенном гиромоторе.
Обобщенная математическая модель демонстрационного гиростабилизатора
Математические модели (уравнения движения) необходимы, чтобы правильно подобрать параметры для проведения демонстрации работы.
Математические модели ДГС запишем отдельно для ОГС на двухстепенном и трехстепенном гироскопах.
Запишем обобщенные уравнения движения ОГС на базе 2-степенного гироскопа




где (1), (2) - уравнения движения относительно оси подвеса платформы и гироузла соответственно;
β, 
 - угол, угловая скорость, угловое ускорение вращения гироузла относительно стабилизируемой платформы;
- угол, угловая скорость, угловое ускорение вращения гироузла относительно стабилизируемой платформы;
αn, 
 - угол, угловая скорость, угловое ускорение вращения стабилизируемой платформы относительно корпуса;
- угол, угловая скорость, угловое ускорение вращения стабилизируемой платформы относительно корпуса;

 - угловая скорость и угловое ускорение вращения объекта относительно корпуса;
- угловая скорость и угловое ускорение вращения объекта относительно корпуса;
Jn - осевой момент инерции платформы со всеми располагающимися на ней объектами относительно оси подвеса;
JГУ - момент инерции гироблока относительно оси подвеса;
H - кинетический момент гиромотора;
C - коэффициент момента по току датчика моментов 4;
Cм - коэффициент момента по току стабилизирующего мотора 16;
I - ток стабилизирующего мотора 16;
IДМ1 - ток датчика моментов 4;
КДУ1, КДУ2 - коэффициенты крутизны датчиков угла 5 и 9;
КФЧВ1, КФЧВ2 - коэффициенты передачи ФЧВ 22 и 23;
КУМ1, КУМ2 - коэффициенты передачи усилителей мощности 31 и 32;
КДЗ - коэффициент передачи дифференцирующего звена 33;
 ,
,  - моменты сил сухого трения в осях полвеса гироузла и стабилизируемой платформы;
- моменты сил сухого трения в осях полвеса гироузла и стабилизируемой платформы;
IЗ - ток задатчика 27, подаваемый в режиме управления (разворота платформы) на датчик момента 4 через усилитель мощности 31;
 - передаточная функция интегродифференцирующего корректирующего звена (на фиг.1 поз.35);
- передаточная функция интегродифференцирующего корректирующего звена (на фиг.1 поз.35);
 - передаточная функция интегродифференцирующего корректирующего звена (на фиг.1 поз.36);
- передаточная функция интегродифференцирующего корректирующего звена (на фиг.1 поз.36);
 ,
,  ,
,  - варианты передаточных функций корректирующего звена (на фиг.1 поз.37).
- варианты передаточных функций корректирующего звена (на фиг.1 поз.37).
Запишем уравнения движения ОГС на базе 3-степенного гироскопа



I=КДУ2КФЧВ2КУМ2W4(p)(αn(p)-αг(p)),
где (3), (4), (5) - уравнения движения трехстепенного гироскопа относительно осей подвеса гироузла и наружной рамки и относительно оси подвеса стабилизированной платформы соответственно;
JГУ - момент инерции гироблока относительно оси подвеса;
JHP - осевой момент инерции трехстепенного гироскопа относительно оси подвеса наружной рамки;
Jn - осевой момент инерции платформы 12 со всеми располагающимися на ней объектами относительно оси вращения;
αг,  ,
,  - угол, угловая скорость и угловое ускорение вращения наружной рамы гироскопа относительно корпуса;
- угол, угловая скорость и угловое ускорение вращения наружной рамы гироскопа относительно корпуса;
 - передаточная функция интегро-дифференцирующего корректирующего звена (на фиг.1 поз.38);
- передаточная функция интегро-дифференцирующего корректирующего звена (на фиг.1 поз.38);
 - передаточная Функция фильтра-пробки для подавления в сигнале ДУ2 колебаний на нутационной частоте
- передаточная Функция фильтра-пробки для подавления в сигнале ДУ2 колебаний на нутационной частоте  ;
;
 - круговая частота нутационных колебаний;
- круговая частота нутационных колебаний;
ξ1, ξ2 - относительные коэффициенты демпфирования, причем для подавления в сигнале ДУ2 колебаний на нутационной частоте должно выполняться соотношение (ξ1, <<ξ2);
 - передаточная функция интегро-дифференцирующего корректирующего звена в контуре поддержания перпендикулярности вектора кинетического момента гироскопа к оси наружной рамы.
- передаточная функция интегро-дифференцирующего корректирующего звена в контуре поддержания перпендикулярности вектора кинетического момента гироскопа к оси наружной рамы.
При построении демонстрационного гиростабилизатора приведенные математические модели (1)-(5) являются отправным пунктом для выбора параметров, виды передаточных функций W1(p)-W5(p) приведены в качестве примера, а их параметры (коэффициенты передачи K1-K5 и постоянные времени Tij) подбираются в процессе синтеза контуров стабилизации известными методами теории автоматического управления исходя из требований к устойчивости и качеству переходных процессов и не являются предметом изобретения.
Таким образом, предлагаемое демонстрационное устройство на базе одного гироскопа позволяет формировать четыре вида гиростабилизаторов, демонстрировать особенности их работы при различных законах вращения поворотной платформы, показывать влияние основных параметров на точностные характеристики. Применение демонстрационного гиростабилизатора в качестве учебного прибора позволит построить интересные в познавательном смысле лабораторные работы по курсу типа «Прикладная теория гироскопов».
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| Устройство для демонстрации гироавтомобиля | 1982 |
|
SU1042066A1 |
| Имитатор успокоителя качки корабля | 1983 |
|
SU1080190A1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОП | 2011 |
|
RU2462761C1 |
Изобретение относится к учебным приборам. Демонстрационный гиростабилизатор построен на базе индикаторного гиростабилизатора, содержащего трехстепенной гироскоп, состоящий из гироузла, который включает в себя гиромотор и внутреннюю раму. На полуосях гиромотора расположен первый датчик угла. На полуоси подвеса наружной рамы расположен второй датчик угла. Трехстепенной гироскоп установлен на стабилизируемой платформе, с полуосями которой кинематически связаны системный датчик угла и стабилизирующий мотор. Пульт управления задает режимы демонстрации и величину кинетического момента гироскопа. Логическое устройство состоит из семи управляемых коммутаторов и компаратора, арретира, установленного на стабилизируемой платформе. Вход арретира соединен с выходом седьмого коммутатора, первый управляемый вход которого подключен к седьмому выходу пульта управления. Второй управляемый вход подключен к выходу компаратора, вход которого одновременно соединен с входом усилителя мощности первого датчика моментов и с сигнальным выходом шестого коммутатора. Управляемый вход шестого коммутатора подключен к шестому выходу пульта управления, а сигнальный вход - одновременно к выходу второго фазочувствительного усилителя и к сигнальному входу четвертого коммутатора. Техническим результатом изобретения является расширение демонстрационных возможностей. 2 ил.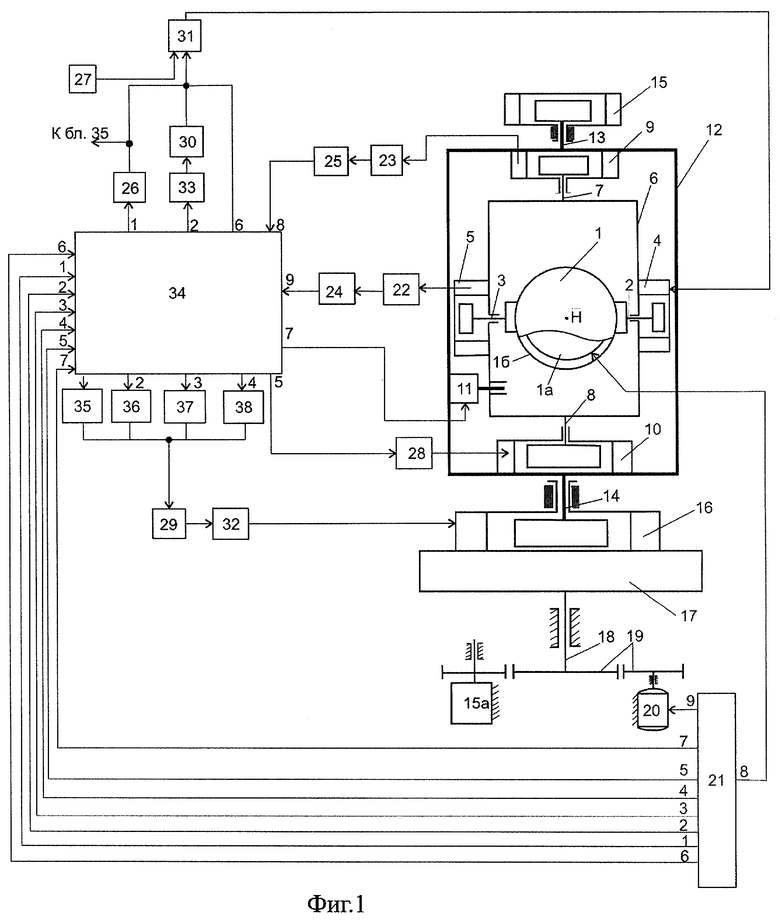
Демонстрационный гиростабилизатор, построенный на базе индикаторного гиростабилизатора, содержащего трехстепенной гироскоп, состоящий из гироузла, который включает в себя гиромотор и внутреннюю раму, на полуосях которого расположен первый датчик угла, подключенный к последовательно соединенным первому предварительному усилителю и первому фазочувствительному выпрямителю, и первый датчик момента, соединенный с усилителем мощности первого датчика момента, наружную раму, на соответствующей полуоси подвеса которой расположен второй датчик угла, подключенный через второй предварительный усилитель к входу второго фазочувствительного выпрямителя, и второй датчик момента, подключенный к выходу усилителя напряжения канала электрического арретирования, при этом трехстепенной гироскоп установлен на стабилизируемой платформе, с полуосями которой кинематически связаны системный датчик угла и стабилизирующий мотор, вход которого через последовательно соединенные усилитель мощности и усилитель напряжения в канале стабилизации подключен к выходам первого - четвертого корректирующих звеньев, отличающийся тем, что он содержит пульт управления, задающий режимы демонстрации и величину кинетического момента гироскопа, логическое устройство, которое состоит из семи управляемых коммутаторов и компаратора, арретира, установленного на стабилизируемой платформе, вход которого соединен с выходом седьмого коммутатора, первый управляемый вход которого подключен к седьмому выходу пульта управления, а второй управляемый вход - к выходу компаратора, вход которого одновременно соединен с входом усилителя мощности первого датчика момента и с сигнальным выходом шестого коммутатора, управляемый вход которого подключен к шестому выходу пульта управления, а сигнальный вход - одновременно к выходу второго фазочувствительного усилителя и к сигнальному входу четвертого коммутатора, управляемый вход которого соединен с четвертым выходом пульта управления, а сигнальный выход - с входом четвертого корректирующего звена; выход первого фазочувствительного усилителя подключен одновременно к сигнальным входам первого, второго, третьего и пятого коммутаторов, при этом сигнальные выходы первого, второго, третьего и пятого коммутаторов подключены соответственно к входам усилителя напряжения канала электрической пружины датчика угловых скоростей, дифференцирующего звена и одновременно второго корректирующего звена, третьего корректирующего звена и усилителю напряжения канала электрического арретирования, а управляемые входы первого, второго, третьего и пятого коммутаторов подключены соответственно к первому, второму, третьему и пятому выходам пульта управления, восьмой выход которого подключен к обмоткам статора гиромотора, причем выход дифференцирующего звена через усилитель напряжения канала формирования демпфирования совместно с выходом усилителя напряжения канала электрической пружины и задатчика канала управления стабилизируемой платформой подключены к входу усилителя мощности первого датчика момента, при этом одновременно выход усилителя напряжения канала электрической пружины соединен с входом первого корректирующего звена.
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| Скородействующий тройной клапан Вестингауза | 1945 |
|
SU68339A1 |
| ЕР 1304546 А1, 23.04.2003 | |||
| US 4304121 А, 08.12.1981. | |||

