(54) ДАТЧИК ПОЛОЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| Вентильный электродвигатель-маховик с электромагнитным подвесом ротора | 1980 |
|
SU905950A1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| Мотор-колесо для летательного аппарата | 2022 |
|
RU2784743C1 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
| Сверхпроводниковая индукторная электрическая машина с комбинированным возбуждением | 2018 |
|
RU2696090C2 |
| Мотор-колесо для самолета | 2018 |
|
RU2703704C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| Регулируемый электрический генератор | 1980 |
|
SU1039001A1 |
1
Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения угловых или линейных перемещений, например для измерения углового положения ротора многофазных вентильных электродвигателей.
Известен датчик углового положения ротора- бесконтактного двигателя постоянного тока, содержащий неподвижный кольцевой магнитопровод сдатчиками Холла, установленными в его зазорах, и ротор из постоянного магнита, причем зазоры шунтированы магнитомягкими насьвцающимися перемычками fl.
Недостатком датчика является большая дискретность в измерении углового положения ротора. . Наиболее близким техническим решением к изобретению является датчик положения, содержащий ферромагнитный статор с обмоткой, источник питания и постоянный магнит-якорь, связываемый в процессе измерений с контролируемым объектом 27.
Датчик снабжен установленным на статоре между чувствительным элементом и магнитом-модулятором,управляемым магнитным шунтом, выполненнюл из четного числа подмагничиваекклх во встречных направлениях торо:идальных седречников, несуашх обмот- |ки управления. Датчик /может быть . / выполнен не только с тороидальньаош, ко также с линейшяк статором.
Недостатком такого датчика является сл ность конструкции, снижающая его надежность.
10
Цель изобретения - упроцение и 1Ю8Е«веняе надежности датчика.
Это достигается г&«, что о&ютка датчика анполяена с раэмеа|еняыми 1ю всей ее дяине равноотсто1эдими
15 токоотводам, расстояние между полюс «и постоянного магнита-якоря равно раестоямюо между соседн|д4и токоотводгцо, а в качестве источника использован генератор одно
20 молярных импуяьсов.
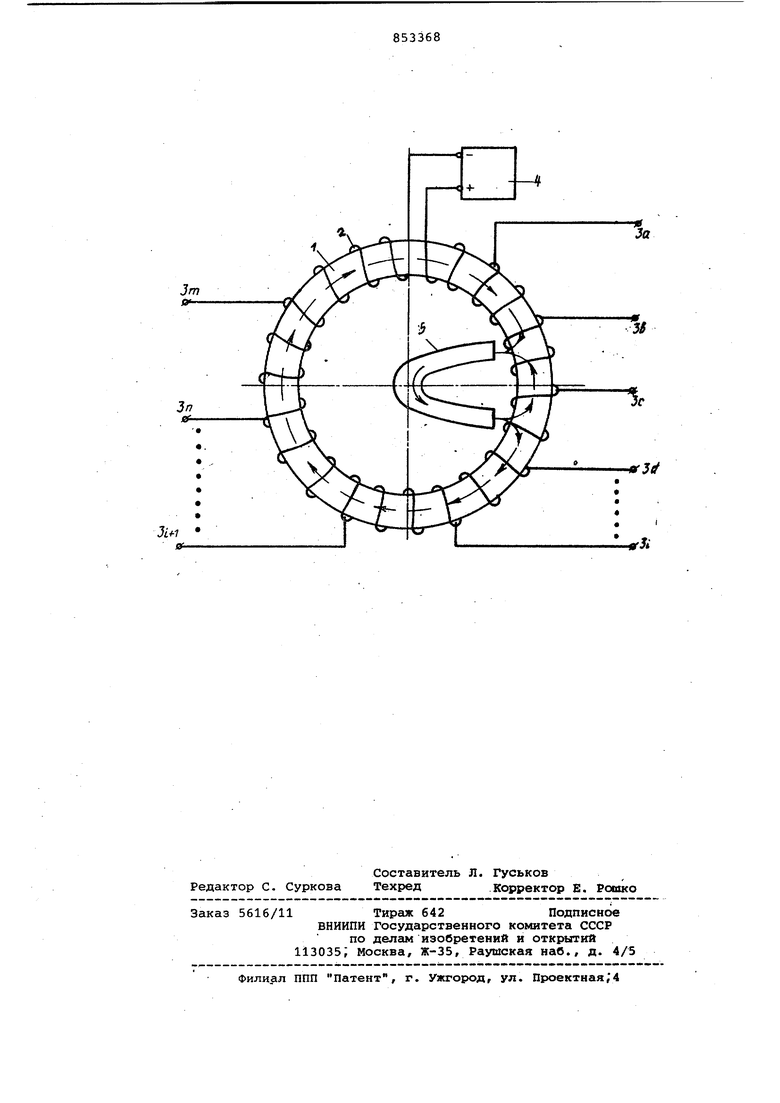
Ва чертеже приведена принципиальная схема датчика положения.
Датчик положения содержит ферромагнитный статор 1 с размещенной
25 на нем обмоткой 2, снабженной по всей ее длине равноотстооцимн друг от токоотводгми За...,31...,3т. Обмотка 2 подключена к генератору 4 однополяриых импульсов. Возле ста30тора 1 расположен подвижный относительно него постоянный магнит-якорь 5. В датчике угловых перемещений статор 1 выполняется тороидальным, а якорь 5 может иметь подковообразкую форму. В датчике линейных перемещений (на чертеже не показан) статор 1 - линейный, а якорь 5 может иметь подковообразную или стержневую форму Расстояние между полюсами постоянного магнита-якоря 5 выполняется раз- . ным расстоянию между соседнимитокоотводами, например За-Зв и т.д.
Полюса магнита-якоря 5 ориентируются относительно стато за 1, или полярность импульсов генератора 4 выбирается таким образом, чтобы намагничивающая сила постоянного магнита-якоря на участке статора, находящемся между полюсами магнита, была бы направлена встречно с, постоянной составляющей магнитного потока, возникающего в статоре 1 при подключении генератора 4 .
Датчик положения работает следующим образом.
При отключенном генераторе 4 обе части статора 1 (малый го сектор - непосредственно между полюсам-и магнита-якоря 5 и большой сектор остальная часть статора 1) насыщены под действием потока, создаваемого магнитом-якорем 5. При этом состояния насыщения этих секторов противоположны. При подключении генератора 4 начинает леремагничиваться участок статора 1 (малый сектор) от. состояния насыщения соответствующей полярности до значения, определяемого вольтсекундной площадкой к концу поступающего от генератора ;,4 импульса. При этом по части обмотки 2, размещенной на малом секторе статора 1, протекает ток, Компенсирующий воздействие магнитного потока магнита -якоря 5 на этот участок По другой чаЪти обмотки с размещенной на большом секторе статора 1 протекает тот же компенсирующий ток, который способствует еще большему насыщению этого участка статора 1, я ток нагрузки, подключаемой к паре токоотводов ( (на чертеже не показана) обмотки 2 на перемаг-, ничиваёмом участке.
В момент прекращения действия импульса генератора 4 ток в нагрузке прерывается, и компенсирующий ток замыкается через нагрузку, а на обмотке 2 возникает обратный импульс 5 напряжения, величина которого зависит от значения сопротивления нагрузки, а продолжительность- определяется величиной вольт-секундной площадки импульса напряжения генераQ тора4.При этом среднее значение тока через нагрузку равно нулю. Обратный импульс на обмотке приводит сердечник статора 1 в исходное состояние. Таким образом, при перемещении якоря 5 последовательно на выводах Зд-З 3fj-3Q и т.д. появляется импульс напряжения, по которому можно судить о положении магнитаякоря 5. Датчик положения может быть выполнен с линейным статором 1 и
0 использован для измерения линейных перемещений.
Предлагаемый датчик прост по конструкции и надежен в работе. При этом сохраняется импульсная форма
5 Iсигналов на его выходе, что обуславливает высокую помехоустойчивость датчика.
Формула изобретения
Датчик положения, содержащий ферромагнитный статор с обмоткой, источник питания и постоянный магнитякорь, связываемый в процессе измерений, с контролируемым объектом, отл ичающийся тем, что, с целью упрощения и повышения надежности, обмотка датчика выполнена с размещенными по всей ее длире равноотстоящими токоотводами, расстоя.ние между полюсами постоянного магнита-якоря равно расстоянию между соседними токоотводами, а в качестве источника питания использован генератор однополярных импульсов.
Источники информации,
принятые во внимание при экспертизе
481968, кл. Н 02 К 29/02, 1974 (прототип),
