(54) ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциально-трансформаторный датчик перемещений | 1986 |
|
SU1392339A1 |
| АМПЛИТУДНО-ФАЗОВЫЙ ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ С ФАЗОВЫМ ВЫХОДОМ | 2001 |
|
RU2208762C1 |
| Трансформаторный преобразователь линейных перемещений | 1990 |
|
SU1768936A1 |
| Датчик перемещений | 1986 |
|
SU1420344A1 |
| Устройство для измерения перемещений | 1978 |
|
SU694766A1 |
| Дифференциально-трансформаторный датчик перемещений | 1989 |
|
SU1620812A1 |
| Преобразователь линейных перемещений | 1979 |
|
SU934200A1 |
| Способ преобразования перемещения в фазу и дифференциально-трансформаторный датчик для его осуществления | 1985 |
|
SU1252652A1 |
| Датчик перемещения | 1986 |
|
SU1357694A1 |
| Датчик перемещения | 1983 |
|
SU1155843A1 |
I
Изобретение относится к контрольно-измерительной технике и может.быть использовано, в частносги, для измерения линейных перемещений подвижных деталей и узлов механизмов.
Известен индуктивный дифференциальный преобразователь линейных перемещений, содержащий две магнитные системы образованные двумя ферромагнитными сердечниками в виде стаканов, с обмотками, и размещенный между ними в воздушном зазоре подвижный якорь. Изменение параметров выходного электрического сигнала определяется изменением рабочих зазоров магнитной цепи I.
Недостатком такого преобразователя является малый диапазон контролируемых iieремещений.
Наиболее близким по техничской сущности к предлгаемому является преобразователь линейных перемещений, содержащий ггодвижный якорь, соединяемый с объектом в процессе измерения, и два соосно установленнь1х неподвижных ферромагнитных сердечника с размс1иеми1)1ми в них измерительной к компенг;)ниг)ммы.м11 обмотками 2|.
Недостаток данного преобразователя заключается в незначительной его помехозащиихенности от воздействия внещних электромагнитных полей при больших рабочих зазорах между открытым торцом ферромагнитного сердечника с измерительной обмоткой и подвижным якорем.
Цель изобретения - новынгение помехозащищенности преобразователя от воздействия внещних электромагнитных полей.
to Поставленная цел:, достигается тем, что преобразователь снабжен ферромагнитным корпусом и металлическими пластинами с радиальными пазами, примыкающим к торцам одного из сердечников.
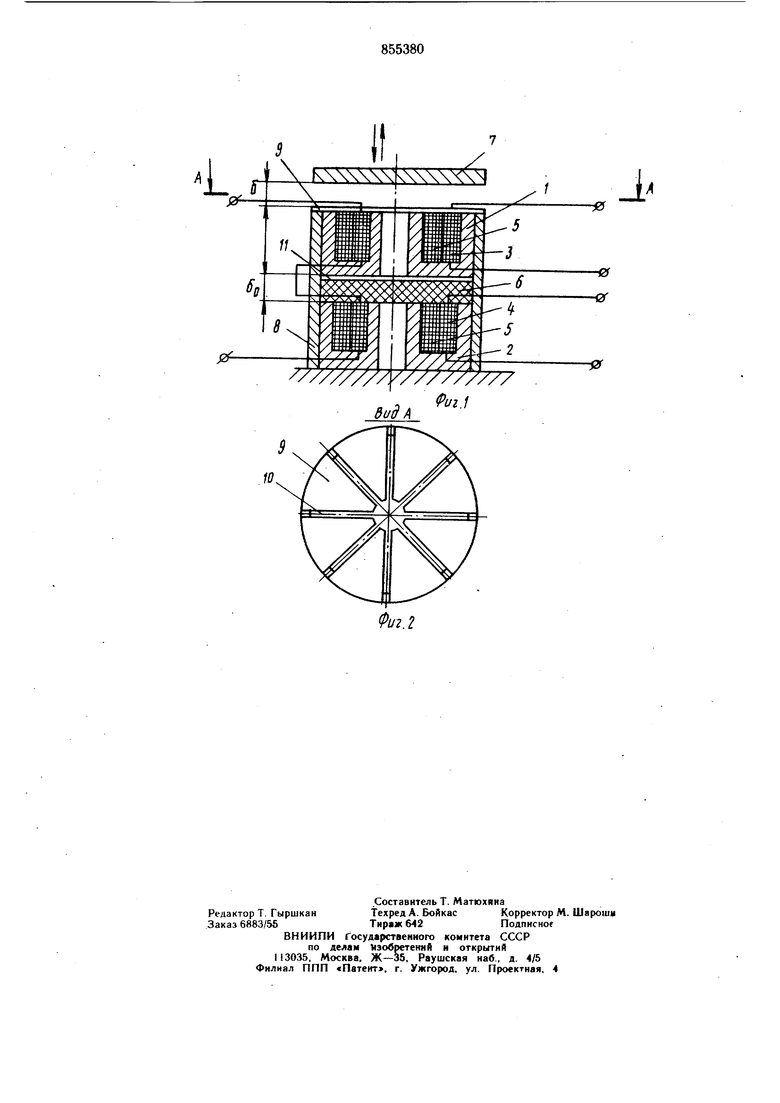
На фиг. I приведено схематическое-изоб ражение преобразователя линейных перемещений; на фиг. 2 - вид А на фиг. I.
Преобразователь содержит ферромагнит ные сердечники I и 2, установленные соосно. В сердечнике 1 размен1ена измерительная обмотка 3, а в сердечнике 2 - компенсационная обмотка 4. В сердечниках 1. и 2 размещены секции обмотки 5 возбуждения, соединенные между собой последовательно
встречно. Между дном сердечника 1 и открытым торцом сердечника 2 установлегга диэлектрическая прокладка 6, толщина которой обусловлена величиной постоянного зазора So компенсационного элемента преобразователя.
.Со стороны открытого торца сердечника 1 размеиьается подвижный якорь 7, соединяемый с объектом в процессе измерения. Подвижный якорь 7 образует с открытым торцом сердечника 1 переменный (рабочий) воздушный зазор.
Сердечники 1, 2 с измерительной 3 и компенсационной 4 обмотками установлены в ферромагнитном корпусе 8, торцовая пластина 9 которого, обращенная в сторону переменного воздушного зазора 5 выполнена с радиальными пазами 10, ширина и число которых определяются из условия необходимой чувствительности преобразователя.Меж ду диэлектрической прокладкой 6 и дном сердечника 1 размещена металлическая пластина 11, имеющая такие же пазы как и пластина 9, для обеспечения идентичности измерительной и компенсационной частей преобразователя.
Компенсационная часть преобразователя служит для компенсации температурных изменений, а также изменений питающего напряжения и частоты.
Преобразователь работает следующим образом.
В секциях обмотки 5 возбуждения, подключенных к источнику переменного тока (не показан), возбуждаются магнитные потоки, проходящие через соответствующие магнитопроноды и через воздушные зазоры и do При перемещении повижного якоря 7 в направлениях (показаны стрелками) под воздействием контролируемого перемещения изменяется величина зазора / , а зазор Jo остается неизменным. Перемещение якоря 7 из балансного положения приводит к возникновению на выходе преобразователя разности переменных напряжений, величина которой пропорциона. величине перемещения якоря, а фаза - соответствует направлению этого перемещения. Изменение температуры окружающей среды, а также изменение величины напряжения питания аналогично влияют на магнитные и электрические свойства как измерительной, так и компенсационной частей преобразователя, что позволяет при встречно-последовательном включении секций обмотки 5 возбуждения исключить сигнал ошибки от дестабилизирующих факторов из результирующего значения выходного сигнала.
Наличие дополнительного внещнего замкнутого магиитопровода (корпус 8, пластины 9 и 11) позволяет создать для паразитного магнитного потока внещних магнитных полей замкнутый магнитопроводящий контур и тем самым устранить влияние внешних магнитных полей на выходной сигнал преобразователя.
Формула изобретения
Преобразователь линейных перемещений, содержащий подвижный якорь, соединяемый с объектом в процессе измерений, и два соосио установленных неподвижных ферромагнитных сердечника с размещенными в них измерительной и компенсационной обмотками, отличаюи{ийся тем, что, с целью повышения помехозащищенности, преобразователь снабжен ферромагнитным корпусом и металлическими пластинами с радиальными пазами, примыкающими к торцам одного из сердеччков. Источники информации,
принятые во внимание при экспертизе
№ 591695, кл. G О D 5/20; G 08 С 9/04, 1978 прототип).
V
II
Ji
0
Риг.1
дид
