///////// ///////////////. //////////////
У///////////
Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения линейных перемещений и расстояний до объекта контроля.
Цель изобретения - уменьшение габаритов датчика и снижение его температурной погрешности измерения перемещений за счет ассиметричного вы- полнения компенсационной части его магнитной системы относительно измерительной части.
На чертеже представлена конструкция датчика перемещений.
Датчик перемещений дифференциально-трансформаторного типа содержит ферромагнитный корпус 1, внутри которого размещен крестообразный магни- топровод 2, имеющий центральньй стержень 3. На.средней части стержня 3 размещены пяра секций обмотки 4 воз- буткдения и пара дифференциально соединенных секций обмотки 5 измерения. Со стороны одного торца магнитопро- вода 2 размещена с зазором t сим- мстризующая пластина 6, установленная с возможностью переметдения для настройки и балансировки датчика и образующая совместно с одной из секциГ обмотки 5 измерения компенсационную часть датчика. Со стороны другого торца магнитопровода 2 размещен с зазором подвижный якорь 7, связываемый в процессе измерения с объектом контроля и образующий сов- местно с другой секцией обмотки 5 измерения рабочую (измерительную) част датчика. Центральный стержень 3 выполнен таким образом, что длина 1 выступающей над поверхностью магнито провода 2 части 8 центрального стержня 3 магнитопровода со стороны симметрирующей пластины 6 выбирается из условий
(1)
Dj|.a
Lo-L-h- (U 1) , (2)
де Dg - внутренний диаметр корпу- en
са 1; LO расстояние от внутренней
поверхности симметрирующей пластины до обращенного к якорю торца магнитопровода i
L - длина части 9 центрального стержня 3, выступающей над поверхностью магнито55
Q
о 5 5
S
0
n
5
провода в рабочей части датчика
h - Толщина магнитопровода 2 между парами секций обмоток датчика
с/ р - начальный зазор между торцом магнитопровода 2 и якорем 7,
S - площади поперечного сечения центрального стержня 3 магнитопровода корпуса 1 датчика соответственно. Начальная настройка датчика осуществляется при выполнении условий
-
f. - i
Поскольку (/j , то математическое выражение (2) определяет соотношение между частью 8 центрального стержня 3 магнитопровода и начальным зазором «Гр между торцом магнитопровода 2 и якорем 7 датчика. Экспериментально установлено, что i(0,1-0,4)D6HДатчик перемещений дифференциально-трансформаторного типа работает следующим образом.
При балансировке датчика перемещением в его начальном положении с помощью симметрирующей пластины 6 добиваются равенства сопротивлений магнитных цепей рабочей и компенсационных частей датчика, вследствие чего ЭДС на обеих дифференциально соединенных секциях обмотки 5 измерения равны, а выходной сигнал датчика равен нулю. При удалении или приближении подвижного якоря 7 относительно рабочего торца датчика в направлении X увеличивается или уменьшается величина рабочего зазора dip , в то время как величина компенсационного зазора у. остается неизменной. Вследствие этого изменяется результирующее напряжение, снимаемое с обеих дифференциально соединенных секций обмотки 5 измерения. Информацию о направлении перемещения несет знак приращения выходного сигнала. Выбор оптимальной длины 1 части 8 центрального стержня магнитопровода в соответствии с (1) и (2) позволяет уменьшить габариты датчика и обеспечить сохранение идентичности параметров его рабочей и компенсационной частей. Кроме того, при изменении t° окружающей среды относительное изменение зазора f в компенсационной части датчика уменьшается, вследствие чего снижается температурная погрешность.
Формула изобретен1 я
Датчик перемещений дифференциально-трансформаторного типа, содержащий ферромагнитный корпус, размещенный внутри него магнитопровод с центральным стержнем, размещенные на средней части стержня пары секций обмоток возбуждения и измерения и установленные с возможностью перемещения напротив противоположных тор- цов магнитопровода симметрирующую пластину и якорь, предназначенный для связи с объектом контроля, о т- личающийся тем, что, с целью уменьшения габаритов датчика и снижения температурной погрешности измерения перемещений, длина 1 выступающей над поверхностью магнитопровода части центрального стержсо стороны симметрирующей пластивыбрана из условий
I f L
1 ь„-ь-ь-сЛр(1+ ),
где
0
DftH
LO .
5
0
5
с
L
h . внутренний диаметр корпусаj расстояние от внутренней поверхности симметрирующей пластины до обращенного к якорю торца магнитопровод а I
длина части центрального стержня, выступающей над поверхностью магнитопровода со стороны якоря; толщина магнитопровода между парами секций обмоток датчика;
начальньй зазор между торцом магнитопровода и якорем
площади поперечного сечения центрального стержня магнитопровода и корпуса датчика соответственно.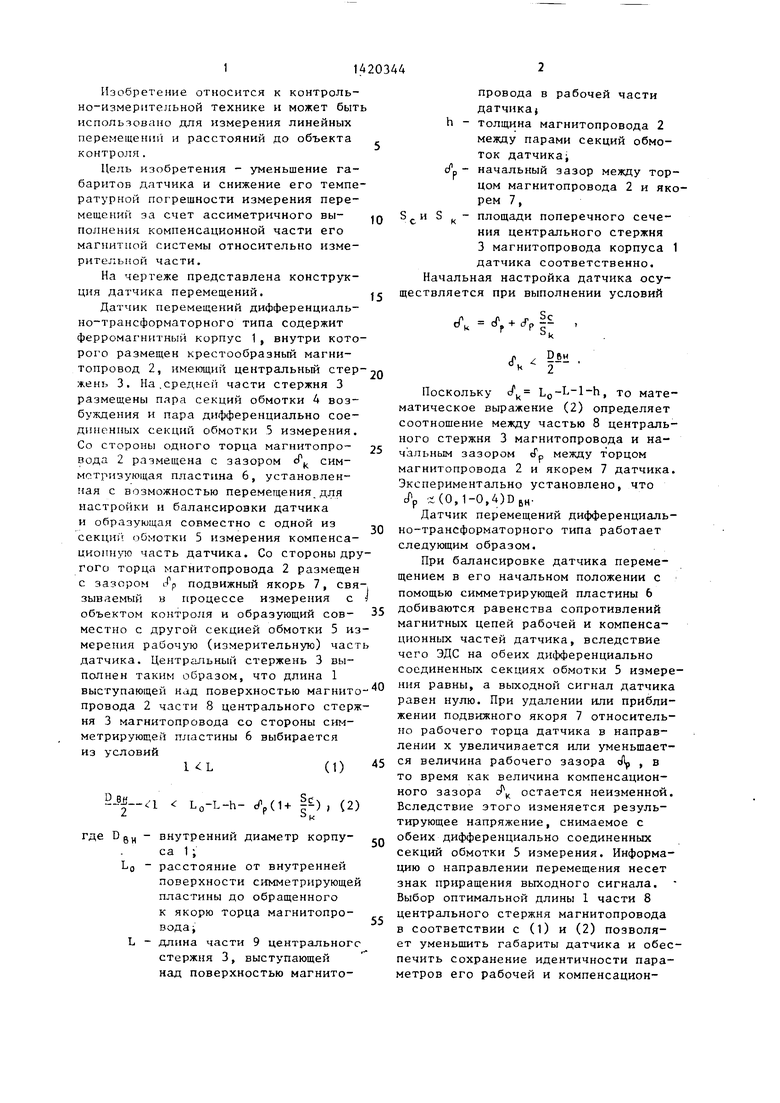

| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциально-трансформаторный датчик перемещений | 1989 |
|
SU1620812A1 |
| Датчик перемещения | 1983 |
|
SU1155843A1 |
| Датчик перемещения | 1986 |
|
SU1357694A1 |
| Дифференциально-трансформаторный датчик перемещений | 1986 |
|
SU1392339A1 |
| Способ преобразования перемещения в фазу и дифференциально-трансформаторный датчик для его осуществления | 1985 |
|
SU1252652A1 |
| АМПЛИТУДНО-ФАЗОВЫЙ ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ С ФАЗОВЫМ ВЫХОДОМ | 2001 |
|
RU2208762C1 |
| Трансформаторный преобразователь линейных перемещений | 1990 |
|
SU1768936A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1737259A1 |
| Трансформаторный датчик перемещений | 1990 |
|
SU1725068A1 |
| Датчик линейных перемещений | 1980 |
|
SU929995A1 |
Изобретение относится к измерительной технике. Цель - уменьшение габаритов трансформаторного датчика линейных перемещений и снижение его температурной погрешности измерения за счет асимметричного выполнения его магнитной системы в рабочей и компенсационной частях. Последовательно соединенные секции обмотки 4 возбуждения и дифференциально включенные секции измерительной обмотки 5 размещены на центральном стержне 3 крестообразного магнитопровода 2 датчика. Длина части 8 центрального стержня, выступающей над поверх- ностью магнитопровода со стороны симметрирующей пластины 6, выбирается меньше длины части 9 центрального стержня, выступающей над поверхностью магнитопровода со стороны подвижного якоря 7 датчика, и выбирается с учетом экспериментально полученных математических выражений. 1 ил. с S6 (Л
| Датчик перемещения | 1983 |
|
SU1155843A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
