Изобретение относится к приборостроению и может найти применение в системах управления газотурбинными двигателями ГТД), например, в системах регулирования статических режимов ГТД по степени повышения давления воздуха в компрессоре- (П,), по комплексу внутридвигательных и внешних параметров (в этот комплекс обычно входит П..), автоматах разгона, системах управления механизацией компрессора, автоматах противопомпажной защиты, регуляторах форсажных камер сгорания по степени понижения давления в турбине, регуляторах сопел форсажных камер.
Известен пневматический датчик отношения давления, имеющий аналоговый выходной сигнал в форме механического перемещения, содержащий проточную и непроточную камеры, разделеннь1е между собой упругой мембраной, которая соединена со штоком, несущим клапан. Датчик работает по принципу
равновесия сил, приложенных к мембране. При изменении любого из делящихся давлений нарушается баланс сил, и мембрана прогибается так, что вследствие изменения проходного сечения клапана давление под мембраной изменяется и баланс сил восстанавливается. Так как при изменившемся отношении давлений клапан со штоком занимает новое положение, то пе10ремещение штока отображает измеряемое отношение давлений СЗНедостатками этого датчика являются:
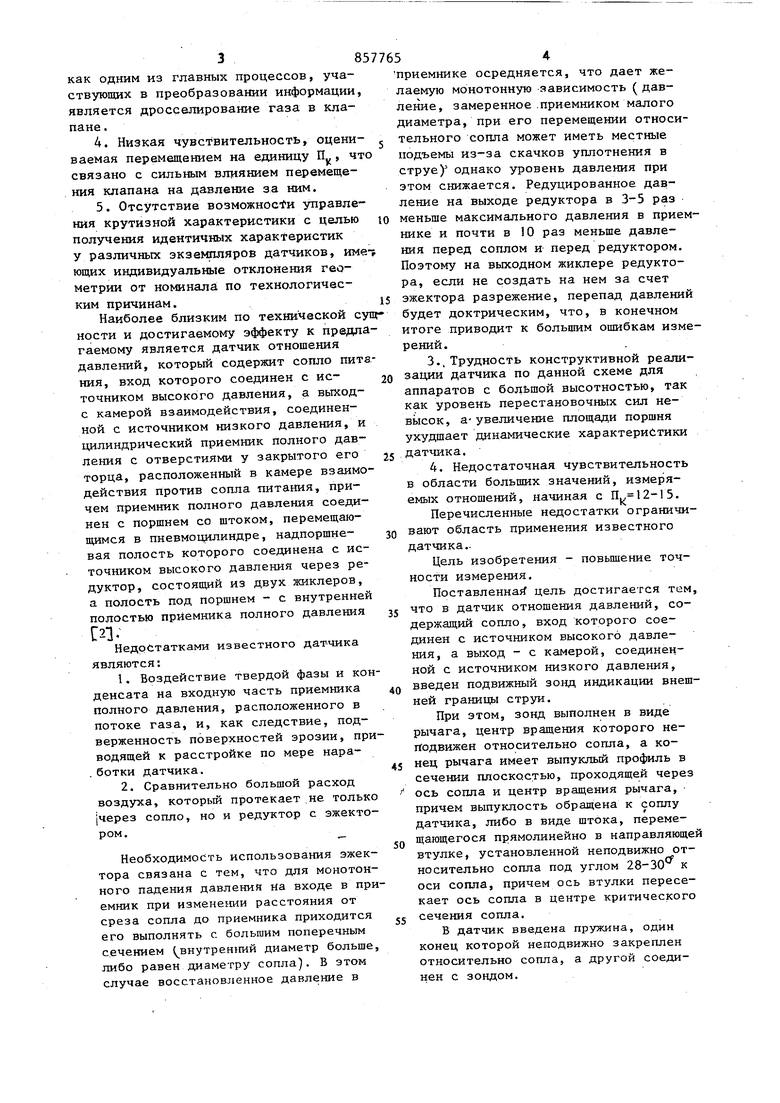
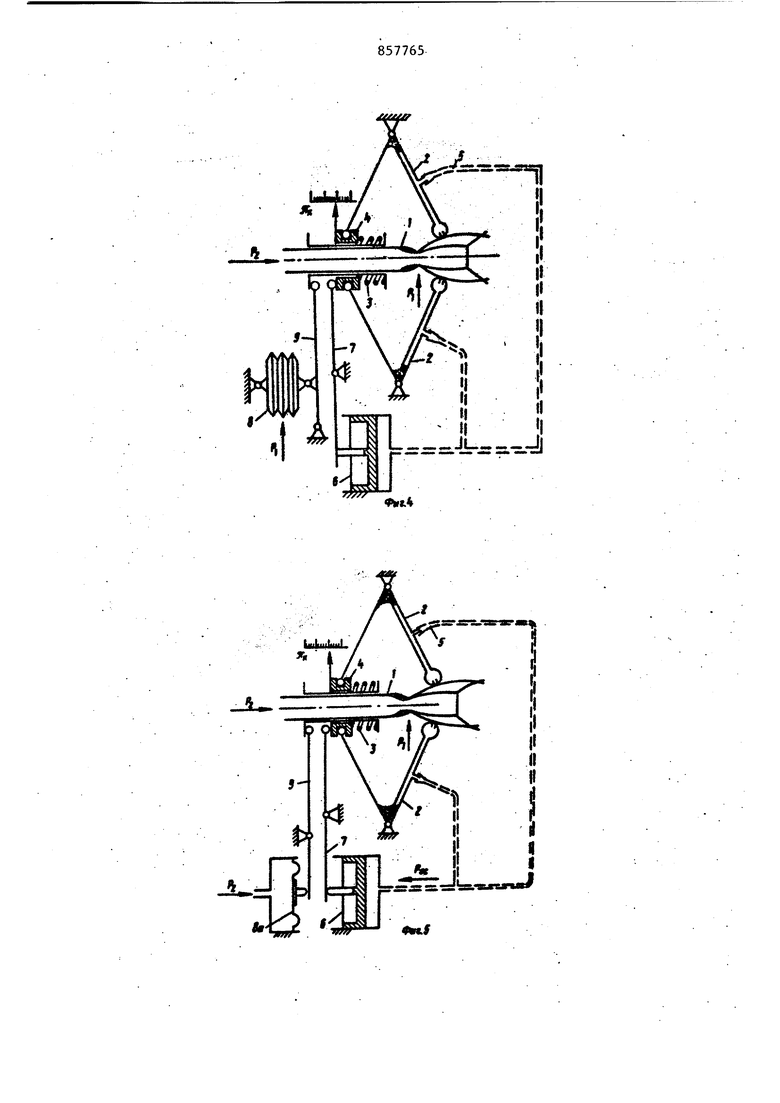
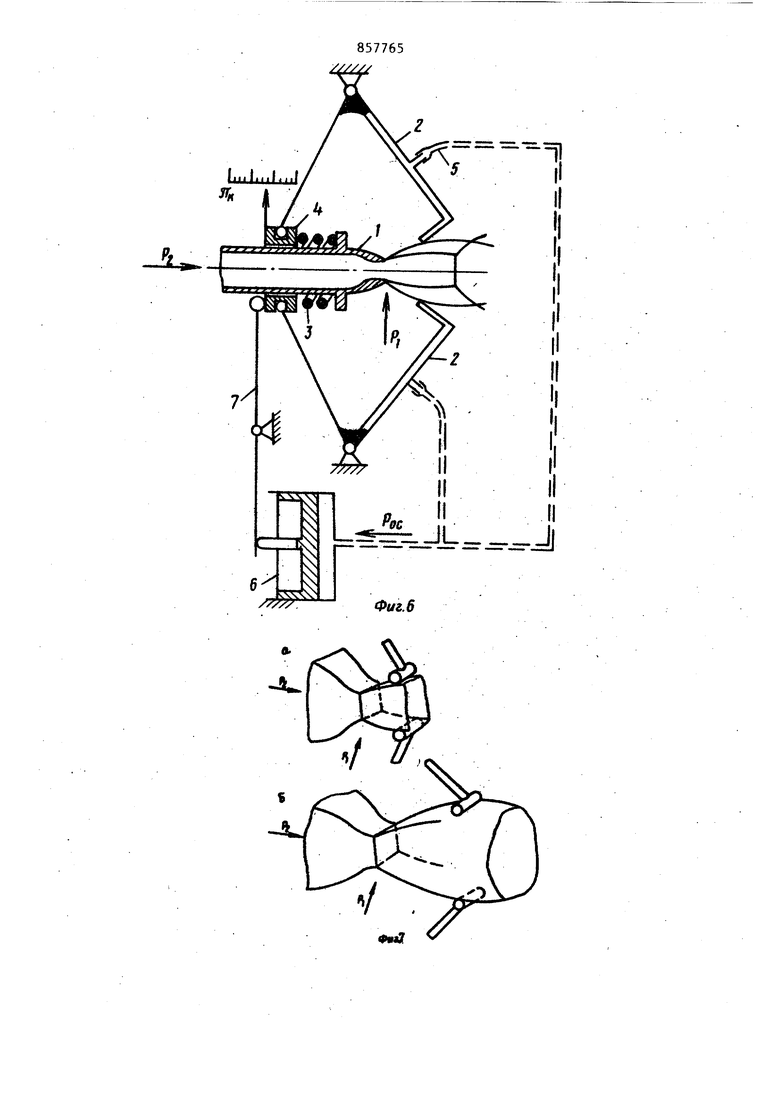
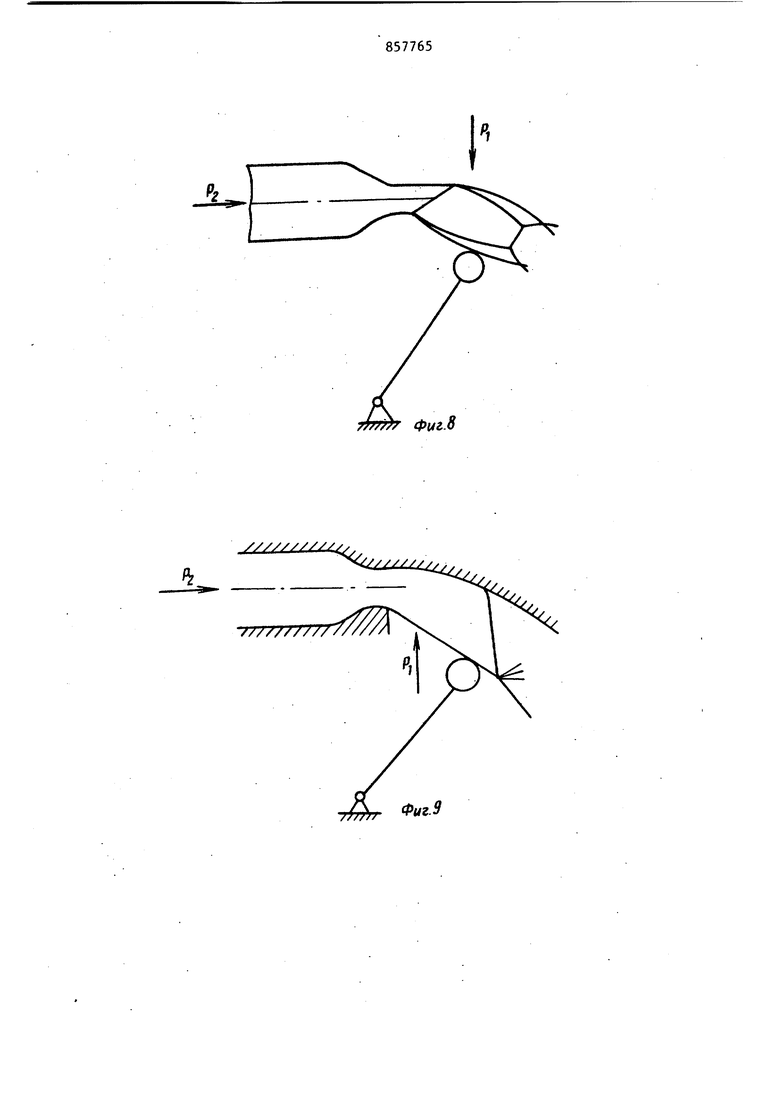
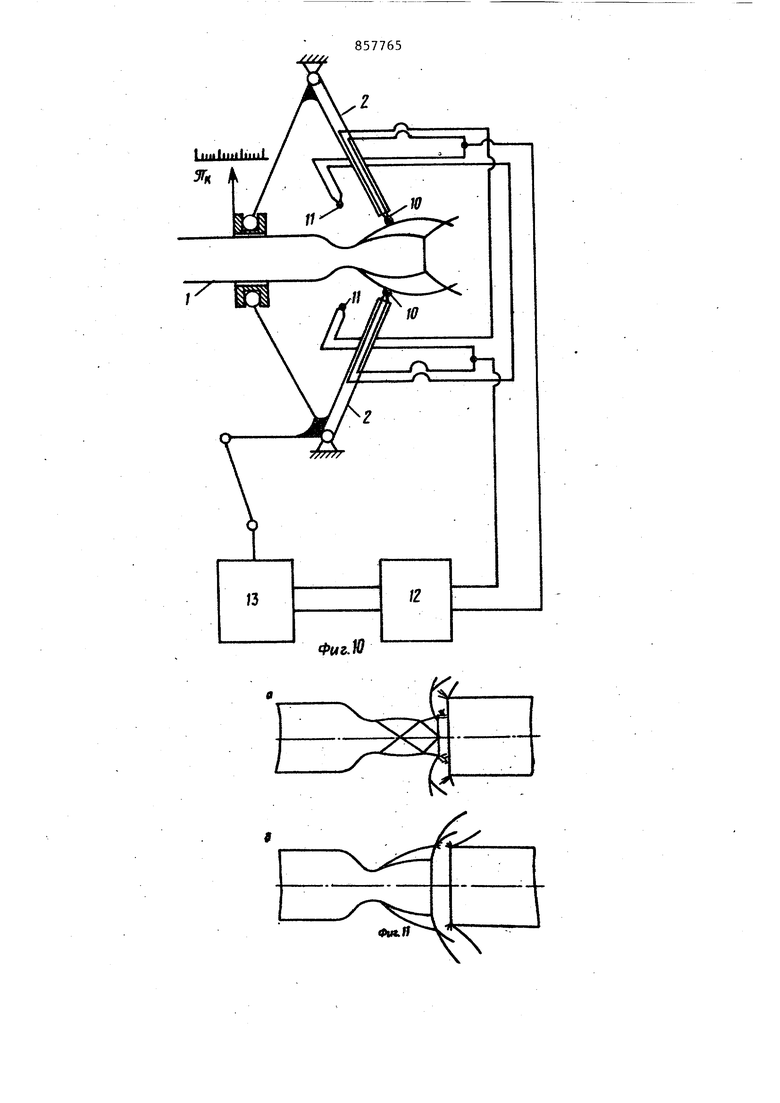
1.Высокая требуемая точность из15готовления профилированного клапана.2.Трудность обеспечения достаточ ного ресурса в связи с воздействием потока газа, содержащего твердые частицы и конденсат на поверхность кла20пана.3.Влияние вязкости рабочего газа, а значит температуры и давления (высоты полета; на точность датчика, так как одним из главных процессов, участвующих в преобразовании информации является дросселирование газа в клапане . 4.Низкая чувствительность, оцениБаемая перемещением на единицу П , чт связано с сильным влиянием перемещения клапана на давление за ним. 5.Отсутствие возможности управления крутизной характеристики с целью получения идентичных характеристик у различных экзешшяров датчиков, им ющих индивидуальные отклонения геометрии от номинала, по технологическим причинам. Наиболее близким по технической с ности и достигаемому эффекту к предл гаемому является датчик отношения давлений, который содержит сопло пит ния, вход которого соединен с источником высокого давления, а выходс камерой взаимодействия, соединенной с источником низкого давления, и цилиндрический приемник полного давления с отверстиями у закрытого его торца, расположенный в камере взаимо действия против сопла питания, причем приемник полного давления соединен с поршнем со штоком, перемещающимся в пневмощглиндре, надпоршневая полость которого соединена с источником высокого давления через редуктор, состоящий из двух жиклеров, а полость под поршнем - с внутренней полостью приемника полного давления Недостатками известного дат-чика являются: 1.Воздействие твердой фазы и кон денсата на входную часть приемника полного давления, расположенного в потоке газа, и, как следствие, подверженность поверхностей эрозии, при водящей к расстройке по мере нара.ботки датчика. 2.Сравнительно большой расход воздуха, который протекает ,не тольк |Через сопло, но и редуктор с эжекто ром. Необходимость использования эжектора связана с тем, что для монотонного падения давления на входе в при емник при изменеьши расстояния от среза сопла до приемника приходится его выполнять с большим поперечным сечением внутренний диаметр больше либо равен диаметру сопла). В этом случае восстановленное давление в приемнике осредняется, что дает желаемую монотонную зависимость ( давление, замеренное .приемником малого диаметра, при его перемещении относительного сопла может иметь местные подъемы из-за скачков уплотнения в струеу однако уровень давления при этом снижается. Редуцированное давление на выходе редуктора в 3-5 раз меньше максимального давления в приемнике и почти в 10 раз меньше давления перед соплом и перед редуктором. Поэтому на выходном жиклере редуктора, если не создать на нем за счет эжектора разрежение, перепад давлений будет доктрическим, что, в конечном итоге приводит к большим ошибкам измерений. 3.. Трудность конструктивной реализации датчика по данной схеме для аппаратов с большой высотностью, так как уровень перестановочных сил невысок, а-увеличение площади поршня ухудшает динамические характеристики датчика. 4. Недостаточная чувствительность в области больших значений, измеряемых отношений, начиная с П.. 12-15. Перечисленные недостатки ограничивают область применения известного датчика.. Цель изобретения - поБьш1ение точности измерения. Поставленная цель достигается тем, что в датчик отношения давлений, содержащий сопло, вход которого соединен с источником высокого давления, а выход - с камерой, соединенной с источником низкого давления, введен подвижный зовд индикации внешней границы струи. При этом, зонд выполнен в виде рычага, центр вращения которого неподвижен относительно сопла, а конец рычага имеет выпуклый профиль в сечении плоскостью, проходящей через ось сопла и центр вращения рычага, причем выпуклость обращена к соплу датчика, либо в виде штока, перемещающегося прямолинейно в направляющей втулке, установленной неподвижно относительно сопла под углом 28-30 к оси сопла, причем ось втулки пересекает ось сопла в центре критического сечения сопла. В датчик введена пружина, один конец которой неподвижно закреплен относительно сопла, а другой соединен с зондом. При этом введен усилитель, зонд выполнен полым, снабжен микроприемником давления на выпуклом профиле и соединен с усилителем, который вы полнен мембранным или поршневым, а сечение сопла выполнено квадратным. В предлагаемом устройстве датчик снабжен профилированным соплом внеш него расширения, а сопло выполнено с косым срезом, зонд выполнен в виде рьГчага, центр вращения которого неподвижен относительно сопла, а на конце рычага, индицирующим внешнюю границу струи, закреплен термоэлектрический преобразователь, включенный в мостовую схему измерения, при этом за срезом сопла соосно ему зак реплено осесимметричное тело и в датчик введено газоотводное устройство, состоящее из последовательно соединеннь1х конфузора,цилиндрической трубы, диффузора и сопла с защитной сеткой. Введение периферийного подвижного зонда в датчике взамен приемгшка пол ного давления, погруженного в струю и перемещаемого с пневмоцилиндром за счет изменения восстановленного давления, коренным образом.меняет способ преобразования информации в датчике на более удобный и перспективный с точки зрения реализации в конструкции . Если в известном датчике существо принципа действия заключается в измерении потерь полного давления в сверхзвуковой нерасчетной струе (потери полного давления и коэффициент восстановления давления, оценивающий их, зависимы от растояния между соплом и приемником, и отношения давлений на сопле) то в предлагаемом датчике - в измерении характерного размера струи, который определяется отношётем делящихся давлений вне зависимости от их уровня. На фиг. 1-13 показаны варианты вы полнения датчика. Функционирование датчика осуществляется следующим образом. Начиная с отношения давления 1,89 из сопла истекает сверхзвуковая нерасчетная струя, имеющая бочкообразную форму, причем характерные размеры первой бочки (а также и последующие) - максимальный диаметр, протяженность и длина, на которой на блюдается максимальный диаметр - однозначно связаны с отношением делящихся давлений вне зависимости от их уровня. Таким образом, первая бочка струи является первичным измерительным преобразователем измеряемого отношения давлений (вторую и последующие бочки в качестве преобразователей использовать нецелесообразно, так как вследствие нарастания струйного пограничного слоя по длине струи в датчике понижается точность). Периферийный подвижной зонд, соприкасающийся со струей, следит за ее внешней границей, двигаясь по дуге окружности большого диаметра, либо прямолинейно, так, чтобы его точка соприкосновения со струей по соображениям получения максимальной чувствительности находилась либо на максимальном диаметре первой бочки либо вблизи его. Таким образом, периферийный лодвижный зонд является промежуточным преобразователем информации, и его положение отображает измеряемое отношение давлений, Выходным сигналом датчика является перемещение зонда сигнал удобный для использования в системах регулирования ГТД любого типа (гидромеханических, пневматических, электрических и комбинированных J. Периферийные зонды в датчике, могут быть двух типов: аэродинамического или термоэлектрического. В первом типе используются для образования сил,.перемещающих зонд, особенности обтекания зонда потоком на внешней границе струи, а во втором типе для этих же целей используются особенности распределения температур на периферии неизотермической струи. свою очередь, аэродинамические зоны различсцотся прямого и непрямого ействия. На фиг. la представлена.схема датика отношения давлений прямого дейтвия. Датчик состоит из сопла 1 и ериферийного зонда 2 в виде рычага, ентр вращения которого неподвижен тносительного сопла, а конец, сорикасающийся со струей, имеет выуклый профиль например, круговой) сечении плоскостью, проходящей чеез ось сопла и параллельной плосости качания рычага, причем выпукость обращена к струе, истекающей из сопла. На фиг. 15 даны примеры вариантов выпуклых профилей. При анализе работы датчика на внешней границе сверхзвуковой струи имеется тонкий струйный пограничный слой, в котором скорость газа изменяется от малой величины, близкой к нулю, до сверхзвуковой скорости, близкой к скорости полного изоэнтропического расширения при заданном отношении давлений. В результате вблизи внешней границы струи располагается звуковая поверхность, на которой скорость газа равна скорости звука, т.е. промежуточной величине между дозвуковой скоростью в окружаю щем пространстве с малым давлением Р и сверхзвуковой скоростью на вшеней границе идеальной струи. Эта звуковая поверхность делит погрансло на две части - дозвуковую и сверхзвуковую. Сверхзвуковая часть пограршчного слоя особо тонка, поэтому с достаточной точностью можно отождествлять звуковую поверхность с внешней границей идеальной струи. Датчик работает следующим образом Если по каким-либо причинам выпуклый профиль зонда окажется погру женным в сверхзвуковую часть погран слоя, либо в сверхзвуковую струю, например, при резком возрастании П то перед профилем возникает ударная волна, за которой возрастает статическое давление, повьш енное давление действует на зонд и создает силу, выталкивающую зонд из сверхзвуковой струи и сверхзвуковой части п гранслоя до тех пор, пока профиль н окажется на звуковой поверхности (фиг. 1R) Если по каким-либо причинам выпуклый профиль окажется в дозвуково части погранслоя, например при снижении то вследствие стеснения профилем дозвукового потока местная скорость над профилем возрастает, а статическое давление уменьшается, ч создает силу, присасывающую зонд к струе до тех пор, пока профиль не окажется на звуковой поверхности (фиг.1г). Таким образом, аэродинамический зонд отслеживает звуковую поверхнос в струйном по1ранслое на внешней гр нице струи и тем самым - внешнюю гр ницу струи. С ростом измеряемого от ношения давлений размер бочки уве 8 ичивается, и зонд .отклоняется в наравлении против часовой стрелки (фиг.1&, е). Угол отклонения зонда, тображающий измеряемое отношение авлений, через механическую связь ередается на вход в систему регулирования . На фиг. 2 представлена схема датчика отношения давления прямого действия, состоящего из сопла 1, периферийных зондов 2, прижимающихся к струе пружиной 3 и механически связанных между собой ползуном 4. Благодаря применению нескольких зондов, суммарная перестановочная сила увеличивается , пружина 3 служит для улучшения качества работы датчика при быстрых снижениях П и создает надежный контакт зондов со струей. Необходимость ее постановки связана с тем, что выталкивающая сила всегда значительно больше присасывающей. Принцип действия датчика по фиг. 2 аналогичен описанному. На фиг. 3 представлена схема датчика отношения давлений непрямого действия, состоящего из сопла 1, периферийных зондов 2, снабженных каналами и отверстиями для отбора статического давления в месте контакта профиля со струей, механически связанных между собой ползуном 4 и прижимаюшд хся к струе пружиной 3, эластичных трубок 5 для передачи давления от зондов к пневмоцилиндру 6 или мембранному усилителю, шток которого механически связан с зондами через рычаг 7 и ползун 4 так, что его усилие складывается с аэродинамической силой воздействия струи на зонд. Датчик работает следующим образом. Если измеряемое отношение давлений повышается, размеры бочки струи увеличиваются, и зонд (зонды) , первоначально находяпщеся на звуковой поверхности в пограничном слое, оказываются погруженными в сверхзвуковой поток. Перед зондом в сверхзвуковом потоке возникает ударная волна, за которой статическое давление превьш1ает меньшее из дeляш IXCя давлений Е( , ПовьШ1енное давление за волной действует непосредственно на зонд, выталкивая его из струи, а также передается через отверстия в профиле, полый рычаг зонда, трубки 5 к пневмоцилиндру 6, на поршне которого возникает перепад давлений, вследствие чего поршень движется влево, способствуя выходу зонда из струи. Сил развиваемая .поршнем, и сила воздействия струи на зонд складыва отся, суммарная сила сжимает пружину до тех пор, пока зонд не зыйдет на зву ковую поверхность. Так как статичес кое давление за волной и давление под поршнем равны, то эффект от дей ствия поршня можно трактовать как увеличение эффективного миделя зонд во столько раз, во сколько соотносятся между собой площадь поршня и площадь миделя выпуклого профиля зо да с учетом коэффициента передачи между ходом штока и ходом зонда. При медленном снижении отношения давлений зонд попадает в дозвуковую часть пограничного слоя, статическо давление между зондом и профилем сни жается до величины, меньшей, чем Р . Под действием изменившегося Перепада давлений поршень движется вправо, освобождая пружину 3. Пружи на и разрежение под профилем зонда заставляют зонд двигаться в направлении к струе до тех пор, пока профиль не окажется на звуковой поверхности в пограничном слое. При резком снижении отношения дав лений на большую величину, зонд может оказаться в области малых скоростей, где разрежение под профилем станет исчезающе малым, в этом случае движение зонда .и связанного с ним полэуна осуществляется только под действием пружины. При отношении давлений, изменяющихся в пределах 2-40, понижение давления под профилем происходит на небольшую величину (не более 15% от Р ). Поэтому различные в скоростях движения зонда в последних двух случаях оказывается несущественным. Положение подвижных частей (ползу ,на и зонда) в датчике (фйг.З) свя..зано с расположением звуковой поверх ности в погранслое, практически совпадающей с внешней границей струи. Поэтому положение их отображает изме ряемое отношение давлений вне зависимости от абсолютной величины делящихся давлений. На фиг. 4 представлена схема датчика отношения давлений непрямого действия, состоящего из сопла 1, зон дов 2, связанных ползуном 4, пружины 3, пневмоцилиндра 6, рычага 7, 510 трубок 5 и анероида 8, связанного с пружиной рычагом 9. Анероид 8 при понижении меньшего из давлений Р расширяется ослабляет затяжку пружины. При постоянном отношении давлений П. и понижающемся Р, снижаются аэродинамические силы, при этом расстройка датчика не происходит. На фиг. 5 представлена схема датчика отношения давлений непрямого действия, в котором высотная коррекция осуществляется по большему из делящихся давлений Р . Коррекция по РП равнозначна коррекции по Р на том основании, что ход ползуна 4, а следовательно, и изменение затяжки пружины пропорциональны П, Тогда в каждом фиксированном положении ползуна или П const соблюдается Р2 const PI . В датчике (фиг.5) коррекция по Р осуществляется упругой мембраной 8а, которая через рычаг 9 воздействует на затяжку пружины 3 так, что при постоянном Пц и снижении Р (равнозначном снижению Р ) затяжка пружины ослабляется пропорционально снижению аэродинамических сил. Расстройка датчика при этом не происходит. Коррекция по Р также может быть осуществлена любыми другими преобразователями давления в перемещение. Например, поршнем или сильфоном, нагруженным пружинами. Назначение и действие их аналогично упругой мемб-. ране. На фиг. 6 представлена схема датчика отношения давлений непрямого действия, в котором в отличие от датчиков по фиг. 4 и 5 переферийные зонды 2 выполнены в виде полых рычагов несущих микроприемники полного давления. Датчик работает следующим образом. При повышении П микроприемник попадает в поток, где полное давление Bbmie, чем в микроприемнике и через полый рычаг и соединительные трубки подводится к пневмоцилиндру, поршень которого выводит зонд с микроприемником из струи, сжимая пружину 3 до тех пор, пока затяжка пружины не прир ет в соответствие с полным давлением, воспринимаемым приемником зонда. ри снижении и датчик работает анаогично с той лишь разницей, что из-за ервоначального положения полного авления перед приемником силовой баланс между поршнем пневмоцилиндра и пружиной нарушается так, что пруЖ11на перемещает поршень и зонд с микроприемником, вводя его в струю до тех пор, пока затяжка пружины не придет в соответствие с полным давлением, воспринимаемым приемником зонда Начальная затяжка и жесткость пружины подбираются так, чтобы зонд с микроприёмником полного давления отслеживал внешнюю границу струи, положение которой отображает отношение делящихся давлений вне зависимости от их абсолютной величины. На фиг. 7 представлена схема взаимодействия струи, истенакндей из сопла с квадратным поперечным сечением, с периферийными зондами. При малых .7в), когда зоны располагаются вблизи среза сопла, где поперечное сечение струи еще близко к квадратному, обеспечивается контакт струи с зондами по всей поверхности зондов, способствующий увеличению сил воздействия струи на зонды, что благоприятно сказывается на точности и динамике датчика. На этом же режиме струя, истекаклцая из сопла с круглым поперечным сечением, соприкасается с зондами по меньшей площади. При боль ших значениях П, зонды располагаются на большом удалении от среза сопла, где струя имеет поперечное сечение, близкое к круглому, в этом случае характеристика датчика с соплом квад ратного сеЧения аналогичны характеристикам датчика с обычным соплом круглого поперечного сечения. На фиг. 8 представлена схема расположения зонда относительно сопла с косым срезом. Вследствие поворота потока в косом срезе перемещение зонда увеличивается, что способствуе увеличению чувствительности. Так как угол среза более 60 трудно осуществить по конструктивным соображениям, то угол поворота потока ограничен ве личиной порядка 10. По Зтой причине косой срез улучшает чувствительность датчика только до П порядка пяти. На фиг. 9 представлена схема расположения зонда относительно профилированного сопла внешнего расширени в котором положение внешней границы струи однозначно связано с измеряемым отношением давлений. На фиг. 10 представлена схема дат чика с термоэлектрическим зондом. Дл аботы датчика необходимо, чтобы газ,, стекающий из сопла был помечен . темературой, отличающейся от темперауры среды низкого давления. Это треование, как правило, удовлетворяется. апример, в компрессорах вследствие сжатия температура воздуха на выходе намного превьщ1ает температуру в окру ающем пространстве. Так, в компрессорах современных авиационных ГТД температура воздуха на выходе достигает величины 900 К имеется тенденция к дальнейшему ее повьшению. Датчик состоит из сопла 1, периферийных зондов 2, несупщхтермоэлектрические преобразователи (термопары) 10, термоэлектрических преобразователей 11 для измерения темпер атуры среды низкого давления, усилителя 12, устройства 13 электромеханической обратной связи. Преобразователи 10 и 11 включены в электрический мост, напряжение С диагонали которого подается в усилитель 12. Настройка схемы производится так, что при отсутствии напряжения в диагонали моста устройство электромеханической обратной связи электромотор, соленоид и т.д.) движет зонды 2 к.струе, а при наличии напряжения от струи. Датчик работает следующим образом. Если по какой-либо причине, например вследствие повьш1ения П преобразователи 10 оказываются погруженными в в струю повышенной температуры, то в диагонали моста появляется напряжение, и электромеханическое устройство выводит зонды 2 с преобразователями 10 из струи до тех, пор, пока преобразователи не оказываются вне струи в той части теплового погра-. 1ШЧНОГО слоя, где температура мало отличается от -температуры окружающей среды. Как только температуры, замеряемые преобразователями 10 и 11, сравниваются, напряжение в диагонали моста исчезает, и устройство обратной связи начнет вводить зонды 2 с преобразователями 10 в струю. В результате зонды 2 будут отслеживать внешнюю границу струи, совершая автоколебания внутри тонкого теплового пограничного слоя. Эти автоколебания в датчике (фиг.10) - следствие того, что устройство является замкнутой нелинейной системой, где вторичньш преобразователь - электрический мост имеет ре лейную характеристику. Однако в технической кибернетике известны и широко применяются методы управления параметрами автоколебаний амплитудой и частотой, когда за счет правильного выбора частотных характеристик элементов подобной системы легко удается снизить амплитуду и по высить частоту до таких величин, что их влияние на объект применения (систему регулирования ГТД) можно прене речь. В датчике (фиг.10) срабатывание обратной связи проис содит при ра балансировке моста, т.е. при зависим ти от уровня этих температур. Уровень температур , а также уровень делений влияют на теплообмен между газом и преобразователями, а значит и .на тепловую инерционность их. По это причине уровень температур и давлени будет влиять на амплитуду и частоту автоколебаний. Однако повьппение амплитуды автоколебаний и понижение частоты, например, в случае увеличения высоты полета, не приведет к уве личению статической ошибки, если автоколебания симметричны (симметрия легко обеспечивается конструкцией). На фиг. 11а,5 показало струйное течение при наличии препятствия за соплом. Когда отношение давлений невелико, структураструи примерно такова, как и при отсутствии препят ствия (фиг.Па), при больших отношениях происходит деформация первой бочки струй с увеличением ее диаметра (фиг.II Б), что может быть использовано для увеличения крутизны характеристики датчика в области больших П|. Наличие препятствия может привести к возникновению высокочастотных автоколебаний, что может отрицательно сказаться на ресурсе датчика, поэтому он может быть приме иен на объектах, где большой ресурс не нужен. На фиг. 12 показано газоотводное устройство для датчика отношения дав лений, состоящее из конфузора 14, цилиндрического участка 15, диффузора 16 и сопла 17с защитной сеткой. Устройство работает аналогично эжектору в режиме большого коэффициента эжекции, благодаря чему в области среза сопла давление не отличается от меньшего из делящихся давлений. Вместе с этим обмен энергией 6514 между активным газом и присасываемым газом среды низкого давления в участке 15, повышение давления в диффузоре 16 перед соплом 17 способствует уходу газа через сетку без влияния на давление около сопла. На фиг. 13 представлен датчик отношения давления, состоящий из сопла , полого штока 18, пневмоусилителя с поршнем 19, плунжера 20, камеры 21, канала 22 подвода большего из делящихся давлений к камере 21 и пружины 23. Выходным сигналом датчика является перемещение штока 18. Датчик работает следующим образо,м. Высокое давление действует на торец плунжера малого диаметра 20 и заставляет шток с поршнем продвигаться к к внешней границе струи, но как только полый шток 18,. выполняющий функцию приемника давления, начнет внедряться в пограничный слой струи, давление в наподпоршневой полости будет возрастать . Движение штока 18 с поршнем 19 и плунжером 20 прекратится, когда наступит равновесие сил от действия давления на поршень и плунжер, а также от действия пружины 23. Особенностью струйного течения данного типа является то, что полное давление на внешней границе струи близко к давлению перед соплом, по этой причине .торец штока 18 не может достичь внешней границы струи, так как в этом случае на большую площадь поршня 19 будет действовать такое же давление, что и на торец плунжера 20. В то же время в струйном пограничном слое пол ное давление быстро убьюает и уже на звуковой поверхности всего лишь в 2 раза превьшхает меньшее из делящихся давлений. Тогда для того, чтобы тореи штока 18 отслеживал некоторую поверхность, заключенную между внешней границей идеальной струи и звуковой поверхностью, достаточно выдержать отношение площади поршня к площади торца плунжера приблизительно равное отношение максимального значения боль- . шего давления удвоенному мини альному значению меньшего давления /1 . Эта поверхность вследствие малой толщины пограничного слоя и, тем боее, его сверхзвуковой части, может читаться практически совпадакнцей с нешней границей идеальной струи. Таким образом, положение зовда 2 атчика (фиг .13) отображает характер,ный размер бочки сверхзвуковой струи, а значит, и отношение давлений на сопле вне зависимости от уровня давлений. Формула изобретения I. Датчик отношения давлений, содержащий сопло, вход которого «соединен с истчником высокого давления, .а выход - с камерой, соедийенной систочником низкого давления, о т л и-,to ратным. чающийся тем, что, с целью повьш1ения точности измерения, в него введен подвижный зонд индикации внеш ней границы струи. 2.Датчик под. 1, отличающийся тем, что зонд выполнен в виде рычага, центр вращения которого неподвижен относительно сопла, а конец рычага имеет выпуклый профиль в сечении плоскостью, проходящей через ось сопла и центр вращения рычага, причем выпуклость обращена к соплу датчика. 3.Датчик по п. 1, о т л и ч а ющ и и с я тем, что зонд выполнен в 1виде штока, размещенного в направляю |щей втулке, установленной неподвижно относительно сопла под углом 2830® к его оси, причем осевая линия направляющей втулки пересекает ось сопла в центре критического сечения 2опла. 4.Датчик по пп. 1 и 2, отличающийся тем, что, с целью расширения динамического диапазона датчика, в него введена пружина, оди конец которой неподвижно закреплен относительно сопла, а другой соединен с рычагом. 5,Датчик по пп.I-А, отличающийся тем, что в него введен усилитель, зоьщ выполнен полым, снаб жен микроприемником давления на выцу лом профиле и соединен с усилителем который выполнен мембранным, или. поршневым. 6.Датчик по пп.1-5, о т л и ч аю щ и и с я тем, что в него введен апероид, один конец которого неподвижен относительно сопла, а второй механически связан с концом пружины противоположным концу, соединенному с рычагом зонда, причем апероид соединен с источником низкого давления 7. Датчик по пп.1,2,4 и 5, о т личающийся тем, что в нег шведена упругая мембрана, корпус ко торой неподвижен относительно сопла 85 16 а подвижный центр механически связан с концом пружины, противоположным концу, соединенному с рычагом зонда, причем мембранная полость соединена с источником высокого давления. 8. Датчик по пп.1-4, отличающийся тем, что в области малых значений отношения давления, сечение сопла датчика выполнено квад9. Датчик по пп. 1-4, о т л и ч ащ и и с я тем, что, с целью повыения чувствительности, датчик снабжен профилированным соплом внешнего расширения. 10.Датчик по пп.1-4, о тли ч аю щ и и с я тем, что, с целью повышения чувствительности в области малых значений отношения давлений, сопло выполнено с косым срезом. 11.Датчик ПОП.1, отличающийся тем, что зонд выполнен в. виде рычага, центр вращения которого неподвижен относительно сопла, а на конце рычага, индицирующем границу струи, закреплен термоэлектрический преобразователь, включенный в мостовую схему цепи электромеханической обратной свйзи. 12. Датчик по пп.1 и 8, отличающийся тем, что, с целью измерения крутизны характеристик в области больших значений отношения давления, за срезом сопла соосно ему закреплено осесимметричное тело. 13.Датчик по пп.1, 8 и 9, о тЛичающийся тем, что в него введено газоотводное устройство, состоящее из последовательно соединенных конфузора, цилиндрической трубы, диффузора и сопла с защитной сеткой. 14.Датчик по пп. 1,3, 4 и 5, о тличающийся тем, что в него введена камера, жестко закрепленная относительно сопла с расположенным в ней плунжером, связанным с поршнем усилителя, причем полость камеры сообщена с источником высокого давления . Источники информации, принятые во внимание при экспертизе 1.Залманзон Л.А. Аэродинамические методы измерения входных параметров автоматических систем. М., Наука, , 1973, с. 20-23, рис, 2,1е. 2.Авторское свидетельство СССР ПО заявке № 2510397/10, 25.07.77 (прототип) .
/
Фиг.)
jr. MiitlrnJ л
tpt4Z.2
llr
ЛJj
.5
.4
/7777.
Фиг. 6
г 16 ,7