(54) СИНХРОННЬГЙ ШАГОВЬГЙ ВИБРОДВИГАТЕЛЬ


| название | год | авторы | номер документа |
|---|---|---|---|
| Вибродвигатель | 1976 |
|
SU625273A1 |
| Вибродвигатель | 1979 |
|
SU858151A1 |
| Вибродвигатель | 1981 |
|
SU987716A1 |
| Вибродвигатель | 1979 |
|
SU845198A1 |
| ВОЛНОВОЙ ПЬЕЗОДВИГАТЕЛЬ | 2013 |
|
RU2560115C2 |
| Вибродвигатель | 1978 |
|
SU681479A1 |
| Вибродвигатель | 1978 |
|
SU665351A1 |
| Вибродвигатель | 1979 |
|
SU817817A1 |
| Вибродвигатель | 1978 |
|
SU743081A1 |
| Волновой вибродвигатель | 1979 |
|
SU832627A1 |
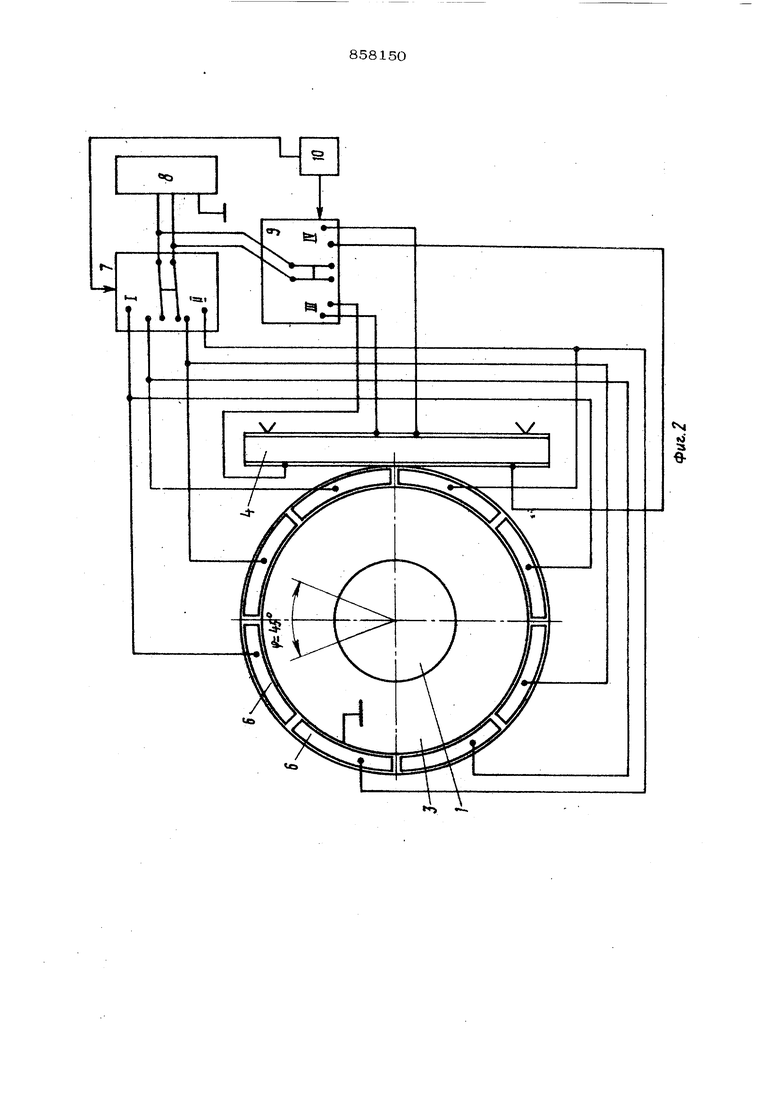


Изобретение относится к приборостроению и может быть использовано для создания точного шагового углового перемещения в. системах автоматики, особенно где требуется синхронное особо точное шаговое перемещение нескольких объектов, приводимых в движение отдельными приводами. Известен шаговый двигатель, содержащий выходной вал, пьезокерамический двигатель в форме разомкнутого кольца и приводной вал i . Недостаток двигателя в том, что шаг зависит от нестабильных механических параметров, таких как, трение между валами и движителем, также от частотноамплитудной характеристики пьезокерамического двигателя, что резко уменьшает точность шага. При этом практически невозможно выполнить два ндентячных синхронно работающих шаговых двягатепя, ко торые могли бы по одному управляющему сигналу, совершать шаговое п емешешю с относительно высокой точностью. Известен синхронный шаговый вибродвигатель, содержащий ротор, установлен-ный на нем пьезсжерамический вибратор, дополнительный пьезокерамический преобразователь, упруго прижатый к пьезокерамическому вибратору, установленному на роторе, источник высокочастотного напряженияНедостатком известного виброцвигателя является малая точность поля, поскольку величина шага зависит от неустойчивых внешних факторов, таких как температура, измеккюшан резонансную частоту преобразователей, фрикционные свойства в месте контакта взаимодействующих оеталей и других. Для исключения этих иэмейений шага перемещения требуются сложные датчики измерения равномерностк шага перемещения и автоматическая подстройка, питающего генератора на резонансную величину, что усложняет к(жстр|укаию виброовигагепя. 38 Цель изобретения - повышение точности шага. Поставленная цель достигается тем, что в синхронном шаговом вибродвигате- ле, содержащем ротор, установленный на нем пьезокврамичесжий преобразователь, упруго прижатый к пьеаокерамическому вибратору, установленному на роторе, источник высокочастотного напряжения, введен переключатель и блок управления переключателем, дополнительный преобрааова гель установлен так, чтобы направление его смещений было параллельно касательной к ротору, пьезо- керамический вибратор выполнен в вице соосного ротору кольца с электродами на торцевык поверхностях, один ий которых разделен на 4 П секторов, где vi равно по крайней мере двум, причем, каждый сектор электрически соединен с последова тельно расположенными за ним четвертым сектором и через переключатель соединен с источником напряжения. Для обеспечени реверса вибродвигатель может быть снабжен вторым переключателем, через который дополнительный преобразователь подключается к источнику напряжения. На фиг. 1 схематически изображено конструктивное выполнение вибродвигате- ля; на фиг. 2 и фиг. 3 - электрическое соединение электродов шаговых вибро- двигателей с шагами перемещения на угол 45 и соответственно; на фиг.4 диа грамма продольных смещений дополнительного пьезокерамического преобразо вателя; на фиг. 5 и фиг. 6 - формы сдви говых деформаций пьезокерамического кольца в вибррдвигателях с шагом перемещения 45 ° и 30° соответственно. Синхронный шаговый вибродвигатель содержит ротор 1, пьезокерамический вибратор в виде пьезокерамического кольца 2, укрепленного через упругий держатель 3 на роторе 1. Дополнительны пьеаокерамический вибратор 4 расположен так, чтобы направление его смещени было направлено по касательной к окружности ротора 1 и прижат к цилиндрическо поверхности пь.езокерамического кольца 2 посредством упруго закрепленного держателя 5. На торцевых поверхностях пьезокерамического кодьца 2 нанесены электр ды, один из которых, нижний, заземлен, а другой электрод по периметру разделен на сектора 6 число которых определяетс по формула Zs 4k. i где X эпектр дов, 1с -««ода колебания пьезокерамическо кольца 2{2,3,4,...,Г1 ) но не менее, чем на восемь секторов. Каждый сеястхзр 6 0 лектрически соедшю с последовательно а ним расположенным каждым четвертым ектором соответственно, а образованные аким образом группы секторов соединены ерез переключатель 7 с источником 8 высокочастотного напряжения, который выполнш; в виде ген атора с craviMeTpH4HbiMK выходами и заземлением. Дополнительный пьезокерамический преобразователь 4 через другой переключатель 9 соединен с тем же источником 8 высокочастотного напряжения. Оба переключателя 7 и 9 соединены с блоком 10 управления. Величина шага равна Л /2к, что равно величине угла каждого сектора, где Ц. - мода колебаний пьезокерамического кольца 2 (2,3,4,...,п ). Вибродвигатель работает следующим образом. При включении источника 8 высокочастотного напряжения блоком управления подается сигнал в переключатели 7 и 9, которые устанавливаются, например, в положение 1 и Ш соответственно и подключают пьезокерамическое кольцо 2 и дополнительный преобразователь 4. К источнику 8 в зоне контакта кольца 2 и линейного преобразователя 4 происходит суммирование двух колебаний: нормальных к продольной оси линейного преобразователя 4, возбуждаемых кольцевым преобразователем 2, и тангенциальных, т.е. параллельных оси линейного преобразователя 4, возбуждаемых линейным преобразователем 4. При определенной их фазе происходят косые соударения счастотой, равной частоте колебаний. Импульс косого удара разлагается на танген циальную и касательную составляющие относительно кольца 2. Тангенциальная составляющая создает момент вращения кольцу 2 и т€М caMbiM ротору 1. Вращение кольца 2 происходит от пучности изгнбных ктебаний кольца 2 до узловой точки этих колебаний, т.е. где нормальные колебания равны нулю. При изгибных колебаниях кольца 2 число узловых точек равно 2к, где ,3,4,...,п . Это и обуславливает величину шага. При переключении переключателя 7 в положение 11, в том месте колыга 2, где была узловай точка, образуется пучность и опять происходят косые соударения с дополнительным преобразователем 4, которые йоворачввают кольцо 2 до другой, узловой точки. При использовании быстродействующих переключателей можно получить и стабильное вращательное движение. Реверс осуществляется переключением переключателя 9с положения Ш в положение IV, что изменяет фазу ародольны колебаний дополнительного преобразовате 4 на 180° . Использование предложенного вибрр двигателя с повышенной точностью шага дает возможность синхронно п емещатъ несколько объектов отдельными вибродвигателяк1И по одному управляющему сигналу с точностью, не менее ОД% от величины поля. Формула изобретения 1. Синхронный шаговый вибродвигатель, содержащий ротор, установленный на нам пьезокерамический вибратор, дополнительный пьезокерамический преобразователь, упруго прижатый к пьезокера мичаскому вибратору, установленному на роторе, источник высокочастотного напряжения, 1 тличающийся тем, что, с целью повышения точности шага вибродвигателя, в него введен переклю2
Фиъ.1 чатель и блок управлений переключателем дополнительный преобразователь установлен так, чтобы направление его смещений было параллельно касательной к ротору, пьезокерамический вибратор выполнен в виде соосного ротору коНьца с электродами на торцевых поверхностях., один из которых разделен на 4а секторов, г да П равно по крайней мере двум, причем каждый сектор электрически соединен с последовательно расположенным за ним четвертым сектором и. через переключатель соединен с источником напряжения. , 2. Вибродвигатель по п. 1, о т л и ч аю щ и и с я тем, что. с целью обеспечения реверса, он снабжен вторым пере- ключателем, через который дополнительный преобрааователь пошслючен к источнику напряжения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 46147О, кл. Н О1 U 41/О8, 1973. 2. Авторское свидетельство СССР № 609559. кл. В 06 В 1/06 1976 (прототип).
