1
Изобретение относится к приборостроению и может быть использовано в маломощных исполнительнь1х и позицирующих устройствах.
Известны пьезоэлектрические вибродвигатели, содержащие ротор и упруго сопряженный с ним пьезоэлемент, которые могут работать как в постоянном, так и в щаговом режиме 1.
Наиболее близким к предлагаемому является вибродвигатель, содержащий ротор, упруго прижатый к нему пьезокерамический преобразователь продольных колебаний, генератор переменного напряжения, аттенюатор и дополнительный пьезоэлемент, который установлен на пьезокерамическом преобразователе в зоне его контакта с ротором и подключен к генератору через аттенюатор и формирователь импульсов по уровню через управляемый вентиль 2.
Однако этот вибродвигатель не обеспечивает возможности управления быстродействием переходных процессов в щаговом режим работы вибродвигателя.
Цель изобретения - обеспечение возможности управления временем переходных
процессов пуска и остановки ротора в шаговом режиме работы.
Поставленная цель достигается тем, что в вибродвигателе, содержащем ротор, упруго прижатый к нему пьезокерамический преобразователь продольных колебаний, ге нератор переменного напряжения, аттенюатор и дополнительный пьезоэлемент, дополнительный пьезоэлемент упруго прижат к поверхности пьезокерамического преобразователя и подключен к генератору переменного напряжения через управляемый аттенюатор, причем резонансная частота дополнительного пьезоэлемента соответствует резонансной частоте преобразователя.
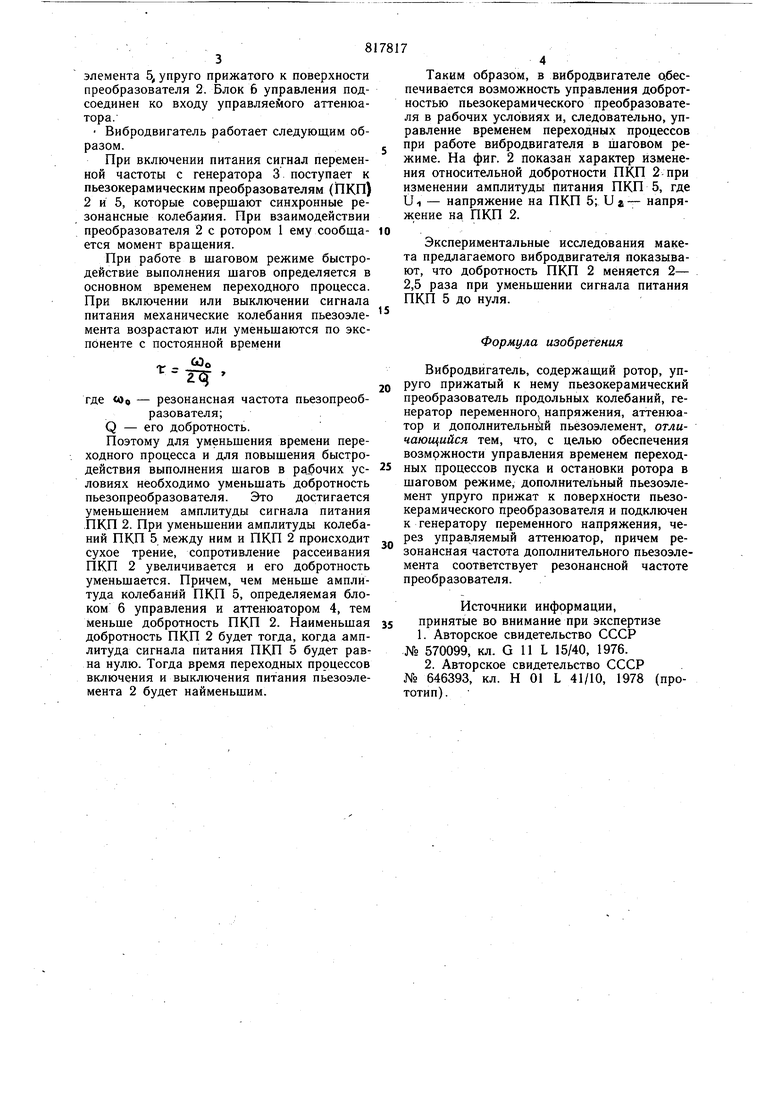
На фиг. 1 представлена схема вибродвигателя; на фиг. 2 - зависимость относительной добротности пьезокерамического преобразователя от амплитуды напряжения питания дополнительного пьезоэлемента.
Вибродвигатель содержит ротор 1, к которому упруго прижат пьезокерамический
преобразователь 2 продольных колебаний,
обкладка которого подключена к генератору 3 переменного напряжения. Выход генератора через управляемый аттенюатор 4 подключен к обкладкам дополнительного пьезоэлемента 5, упруго прижатого к поверхности преобразователя 2. Блок 6 управления подсоединен ко входу управляейого аттенюатора. Вибродвигатель работает следующим образом. При включении питания сигнал переменной частоты с генератора 3 поступает к пьезокерамическим преобразователям (ПКП) 2 и 5, которые совершают синхронные резонансные колебания. При взаимодействии преобразователя 2 с ротором 1 ему сообщается момент вращения. При работе в шаговом режиме быстродействие выполнения шагов определяется в основном временем переходного процесса. При включении или выключении сигнала питания механические колебания пьезоэлемента возрастают или уменьшаются по экспоненте с постоянной времени где во - резонансная частота пьезопреобразователя;Q - его добротность. Поэтому для уменьшения времени переходного процесса и для повышения быстродействия выполнения шагов в рабочих условиях необходимо уменьшать добротность пьезопреобразователя. Это достигается уменьшением амплитуды сигнала питания .ПКП 2. При уменьшении амплитуды колебаний ПКП 5 между ним и ПКП 2 происходит сухое трение, сопротивление рассеивания ПКП 2 увеличивается и его добротность уменьшается. Причем, чем меньше амплитуда колебаний ПКП 5, определяемая блоком 6 управления и аттенюатором 4, тем меньше добротность ПКП 2. Наименьшая добротность ПКП 2 будет тогда, когда амплитуда сигнала питания ПКП 5 будет равна нулю. Тогда время переходных процессов включения и выключения питания пьезоэлемента 2 будет наименьшим. Таким образом, в вибродвигателе обеспечивается возможность управления добротностью пьезокерамического преобразователя в рабочих условиях и, следовательно, управление временем переходных процессов при работе вибродвигателя в шаговом режиме. На фиг. 2 показан характер изменения относительной добротности ПКП 2 при изменении амплитуды питания ПКП 5, где Ui - напряжение на ПКП 5; Uj- напряжение на ПКП 2. Экспериментальные исследования макета предлагаемого вибродвигателя показывают, что добротность ПКП 2 меняется 2- 2,5 раза при уменьшении сигнала питания ПКП 5 до нуля. Формула изобретения Вибродвигатель, содержащий ротор, упруго прижатый к нему пьезокерамический преобразователь продольных колебаний, генератор переменного напряжения, аттенюатор и дополнительный пьезоэлемент, отличающийся тем, что, с целью обеспечения возможности управления временем переходных процессов пуска и остановки ротора в шаговом режиме, дополнительный пьезоэлемент упруго прижат к поверхности пьезокерамического преобразователя и подключен к генератору переменного напряжения, через управляемый аттенюатор, причем резонансная частота дополнительного пьезоэлемента соответствует резонансной частоте преобразователя. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 570099, кл. G 11 L 15/40, 1976. 2. Авторское свидетельство СССР № 646393, кл. Н 01 L 41/10, 1978 (прототип).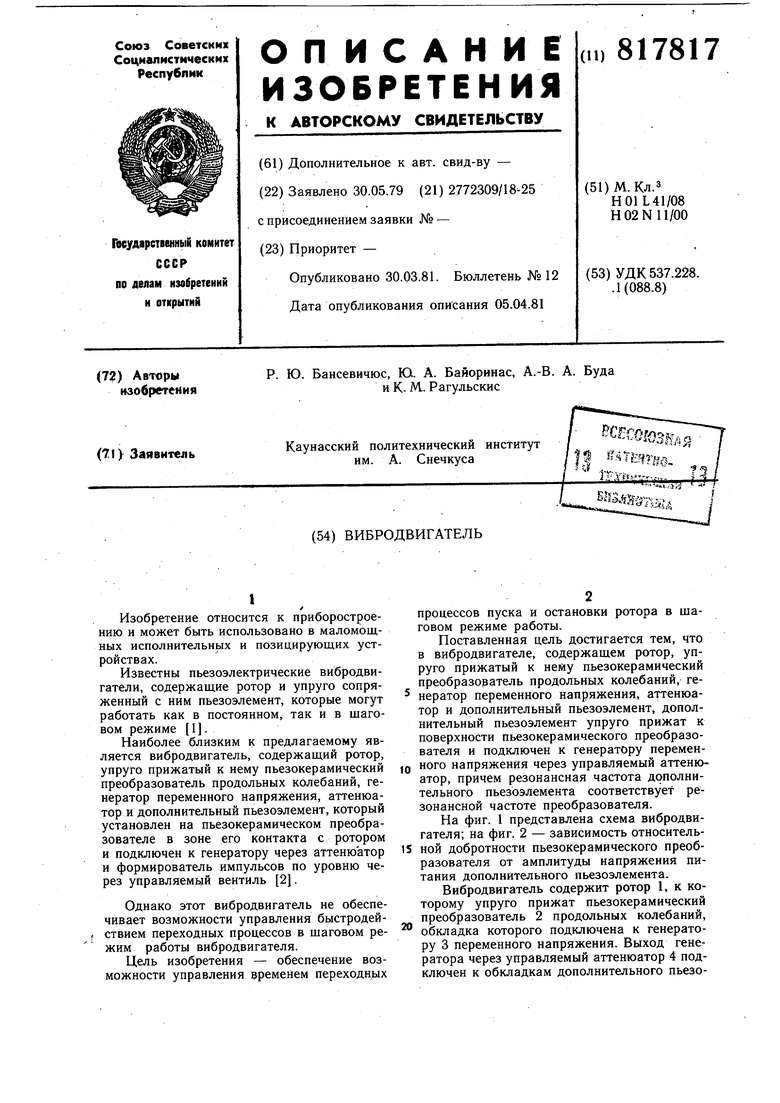
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для питания пьезоэлект-РичЕСКОгО пРЕОбРАзОВАТЕля ВибРО-дВигАТЕля | 1979 |
|
SU817813A1 |
| Устройство для управления вибродвигателем | 1978 |
|
SU769691A1 |
| Вибродвигатель | 1981 |
|
SU968869A1 |
| Вибродвигатель | 1979 |
|
SU858153A1 |
| Устройство для питания шагового вибродвигателя | 1976 |
|
SU682972A1 |
| Пьезоэлектрический вибродвигатель | 1978 |
|
SU646393A1 |
| Вибродвигатель | 1979 |
|
SU949741A1 |
| Устройство для питания пьезокерами-чЕСКОгО пРЕОбРАзОВАТЕля ВибРО-дВигАТЕля | 1979 |
|
SU817814A1 |
| Устройство для питания пьезокерамического преобразователя вибродвигателя | 1978 |
|
SU739671A1 |
| Устройство для управления пьезоэлектрическим вибродвигателем | 1978 |
|
SU744879A1 |
срие. г
