(54) УСТРСЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ ЖИДКИХ КОРМОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Кормораздатчик | 1977 |
|
SU679193A1 |
| Устройство для раздачи жидких кормов | 1990 |
|
SU1743511A1 |
| Устройство для раздачи кормов | 1982 |
|
SU1115687A1 |
| Устройство для распределения жидких кормов | 1985 |
|
SU1303094A1 |
| РАЗДАТЧИК-ДОЗАТОР СУХИХ КОРМОВ | 1972 |
|
SU352642A1 |
| Устройство для раздачи кормов | 1978 |
|
SU733578A1 |
| Раздатчик сухих кормов | 1979 |
|
SU820753A1 |
| Устройство для выдачи влажных кормовых смесей | 1983 |
|
SU1123604A1 |
| Дозатор кормов | 1988 |
|
SU1561925A1 |
| Устройство для дозированного кормления животных | 1983 |
|
SU1109096A1 |
I
Изо етение относится к сельскому хозяйству и препназначено для механизашо процесса кормления животных, преимушесгвенно в свиноводческих ком- плексах.
Известно устройство для рас 1ределения тек5,1аих кормов, сос1чэящее из корм(ифо вода ; ответвлениями, закрываемыми запорными элементами поворотного типа, тросовой тяги и датчиков уровня, разме в кормушках Г t J .
Однако это устройство имеет сложную конструкцию, а кроме того оно неприменимо в системах с ииркутгягшей корма по кольцевому кормопроводу.
Известно также устройство для распределения жидких кормов, вкхпочаюшее кормощювод с выгрузными отверстиями, п)екрываемыми поворотными запорными элементами с закрепленными на ах оси рычагами, взаимодействующими с упорами, установленными на замкнутой гибкой тяге 2 1.
Однако известное устройство имеет низкую точность дозирования, обусловленную сложностью рассгановки упоров и рассогласованием их взаимного расположе ния.
Цель изобретения - повышение точности дозирования корма путем обеспечения надежного контакта упоров с рьтагами.
Поставленная цель достигается тем, что в устройстве запорные элементы имйот по три рычага, каждый из которых выполнен в виде .втулки с подвижно установленным в Ней стержнем, на свободном - конце которого закреплю {J - офазный захват для упора, причем рядом стоящие рычаги расположеньс под прямым углом.
Кроме того, рычаги закреплены на оси запорного элемента в точке их пересечения.
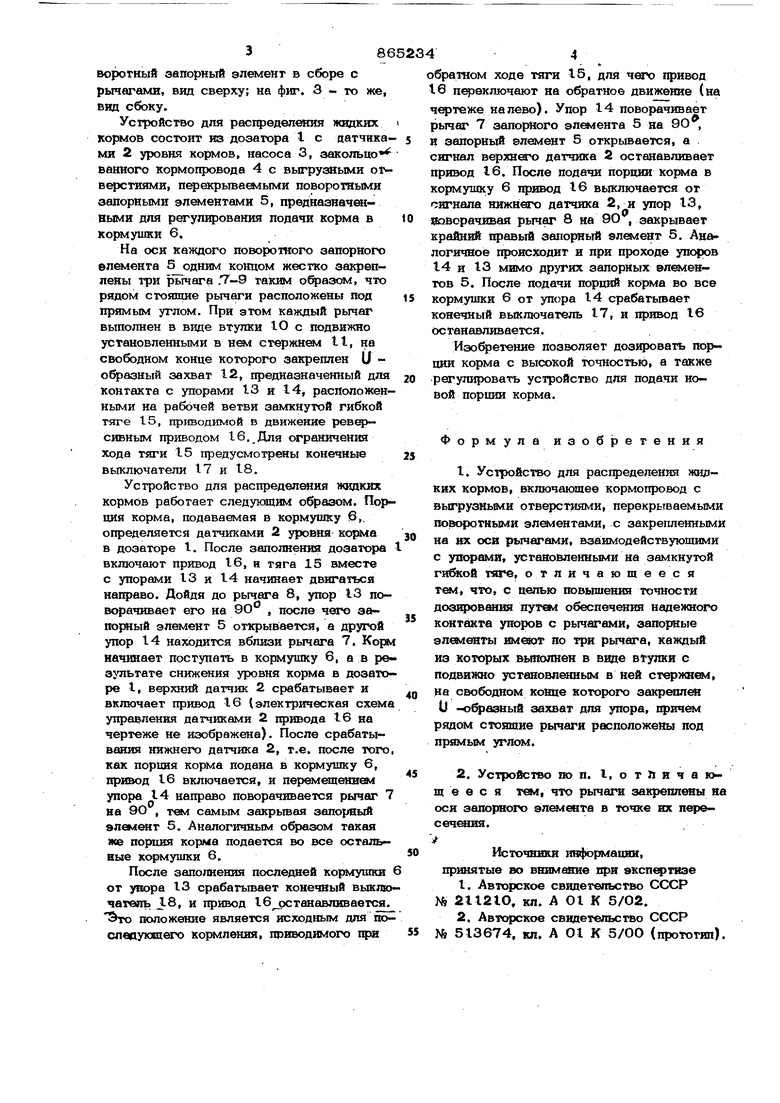
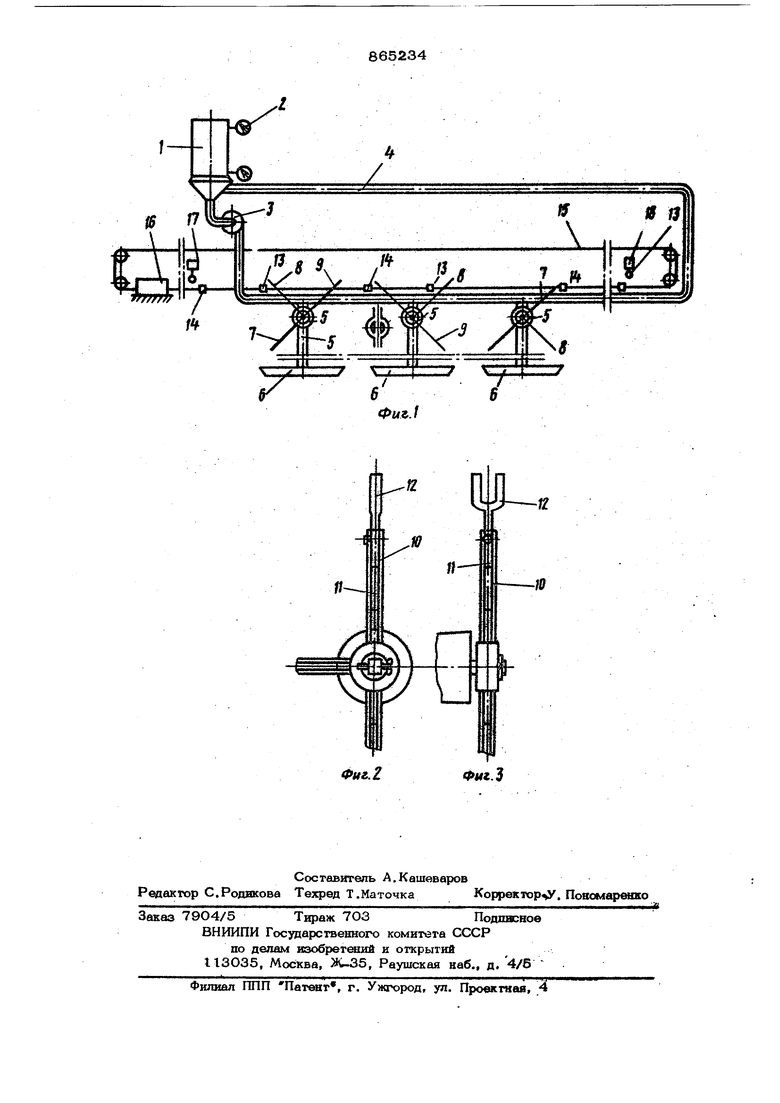
На фиг. 1 изофажена принципиальная, схема устройства с тремя вариантами взагалюго расположения и рычагов запорного элемента; на фиг. 2 - по386воротный запорный элемент в сборе с рычагами, вид сверху; на фиг, 3 - то же, ВИИ сбоку. Устройство дпя распределения жидких KOfMOB состоит из дозатора I с датчиками 2 уровня кормов, насоса 3, аакольцо ванного кормопровода 4 с выгрузными отверстиями, перекрываемыми поворотными запорными элементами 5, предназначенвыми для регулирования подачи корма в кормушки 6. На оси каждого поворотного запорного елемента 5 одним концом жестко закреплены три рычага .Т-9 такил образом, что рядом cTosmme рычаги расположены под прямым углом. При этом каждый рычаг выполнен в виде втулки 10 с подвижно установленными в нем стержнт II, на свободном конце которого закреплен U образный захват 12, предназначенный для контакта с упорами 13 и 14, расположенными на рабочей ветви замкнутой гибкой тяге 15, пр1тодимой в движение реверсивным приводом 16. Для ограничения хода тяги 15 предусмотрены конечные вьпшючатели 17 и 18. Устройство для распределения жщккх кормов работает следующим образом. Порция корма, подаваемая в кормушку S,. определяется датчиками 2 уровня корма в дозаторе I. После заполнения дозатс м включают привод 16, и тяга 15 вместе с упорами 13 и 14 начинает двигаться направо. Дойдя до рычага 8, упор 13 поворачивает его на 9О , после чего запорный элемент 5 открывается, а другой упор 14 находится вблизи рычага 7. Корм начинает поступать в Kopviyuncy 6, а в реajTibTaTe снижения уровня корма в дозаторе I, верхний датчик 2 срабатывает и включает привод 16 (электрическая схема управления датчиками 2 привода t6 на чертеже не изображена). После срабатывания нижнего датчика 2, т.е. после того как порция корма подана в кормушку 6, привод 16 включается, и перемещением упора 14 направо поворачивается рычаг 7 на 9О , тем самым закрьгаая запорный элемент 5. Аналогичным образом такая же порция корма подается во все остальные кормушки 6. После заполнения последней кормушки от упора 13 срабатывает конечный выклю чатель J. 8, и привод 16 рстанавлнвается. Это положение является исходным для послепукщ х) корФдления, приводимого при братном ходе тяги 15, для чего привод 6 переключают на обратное движение (на чертеже налево). Упор 14 поворачивает рычаг 7 запорного элемента 5 на 9О , И запорный элемент 5 открывается, а сигнал верхнего датчика 2 останавливает привод 16. После подачи порции корма в кормушку 6 привод 16 выключается от сигнала нижнего датчика 2, и упор 13, шворачивая рычаг В на 90 .закрывает крайний правый запорный элемент 5. Аналогичное происходит и при проходе упоров 14 и 13 мимо других запорных элементов 5. После подачи порций корма во все кормушки 6 от упора 14 срабатьгеает конечный выключатель 17, и привод 16 останавливается. Изо етение позволяет дозировать порции корма с высокой точностью, а также регулировать устройство для подачи новой Порции корма. ормула изобретения I. Устройство для распределения жидких кормов, включающее кормопровод с выгрузиьв«1и отверстиями, перекрываемыми поворотными эЛ0 1ентами, с закрепленными на их оси рычагами, взаимодействующими с упорами установленньв и на замкнутой тяге, отличающее с я та, что, с целью повышении точности ДО31ФОВШ1ИЯ путем обеспечения надежного к жтвхта упоров с рычагами, запорные элементы имеют по три рьпага, каждый из которых выполнен в вще втулки с подвижно установленным в ней стержнем, на свободном конце которого закршшен и -«фазный захват для упора, прич@ъ{ рядом стоящие рычаги расположены под прямым углом. 2. Устройство по п. I, отйяча щ е е с я тем, что рычах закреплены на оси запорного &п&леагв в точке их пересеч шя. Источники информации, принятые во вниметие оря экспертизе 1.Авторское свидетельство СССР № 211210. кл. А 01 К 5/02. 2.Авторское свидетельство СССР № 513674, кп. А 01 К 5/00 (прототип).
Фиг.
10
Фмг.З
