(54) ЗАХВАТ ДЛЯ БУРИЛЬНЫХ ТРУБ
| название | год | авторы | номер документа |
|---|---|---|---|
| Элеватор для спуска и подъема бурильных труб | 1980 |
|
SU922267A1 |
| АВТОМАТ ДЛЯ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЙВ БУРЕНИИ | 1969 |
|
SU236377A1 |
| Трубодержатель | 1977 |
|
SU657167A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ И ЗАЖИМА ТРУБ | 1992 |
|
RU2043803C1 |
| Устройство для определения азимутального и зенитного углов скважины | 1983 |
|
SU1090862A1 |
| Механизм удержания буровой колон-Ны | 1978 |
|
SU848576A2 |
| СПОСОБ ВСКРЫТИЯ ВОДОНОСНЫХ ГОРИЗОНТОВ ВЕРТИКАЛЬНОЙ СКВАЖИНОЙ И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2244794C1 |
| Бурильная машина | 1988 |
|
SU1713442A3 |
| Спайдер буровой установки | 1990 |
|
SU1738998A1 |
| УСТАНОВКА ДЛЯ БУРЕНИЯ ВЕРТИКАЛЬНЫХ СТВОЛОВ ШАХТ | 1964 |
|
SU223012A1 |
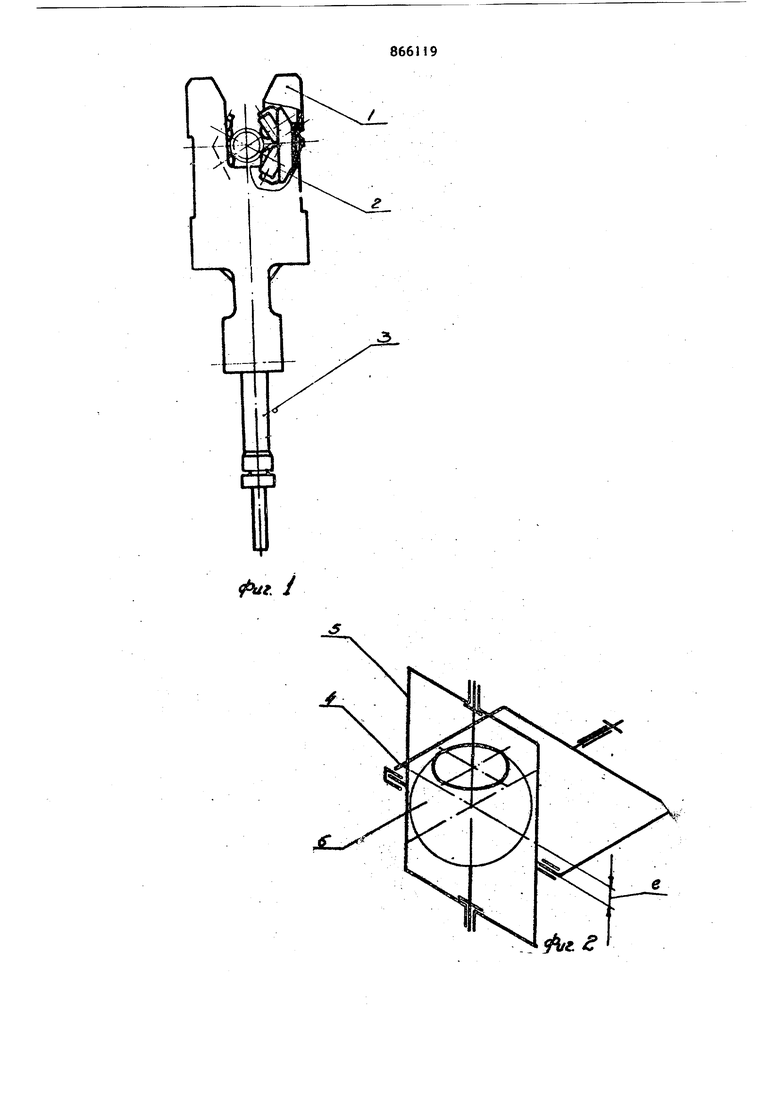
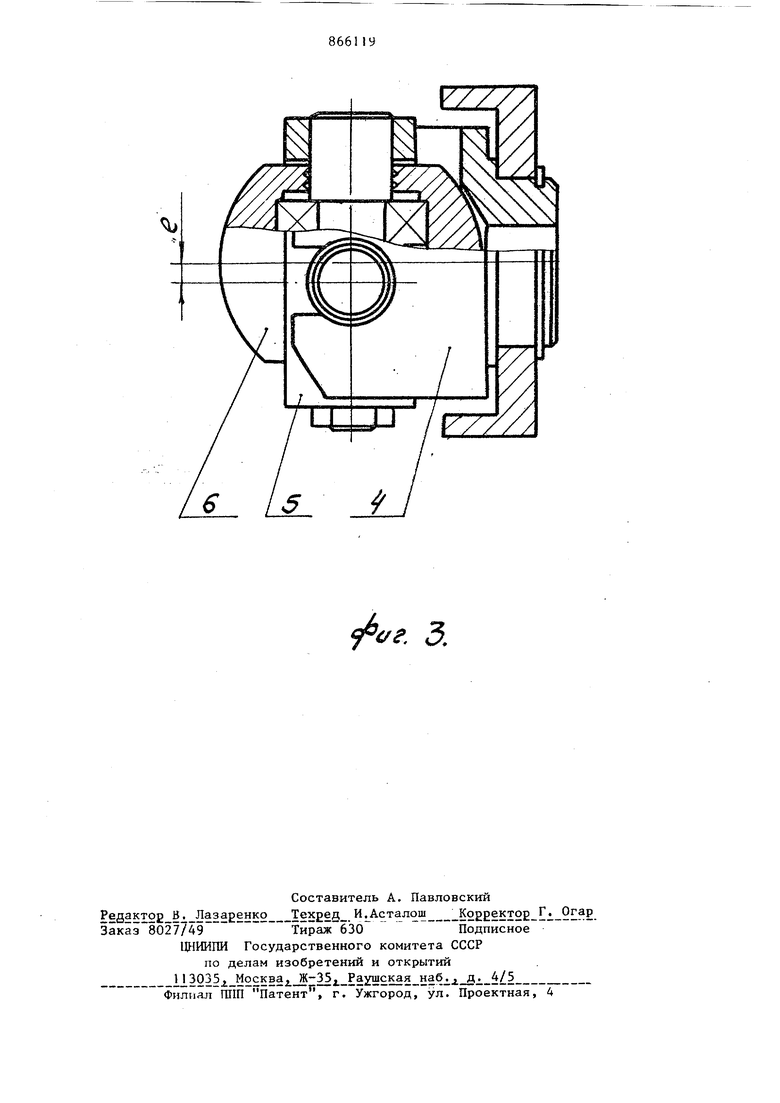
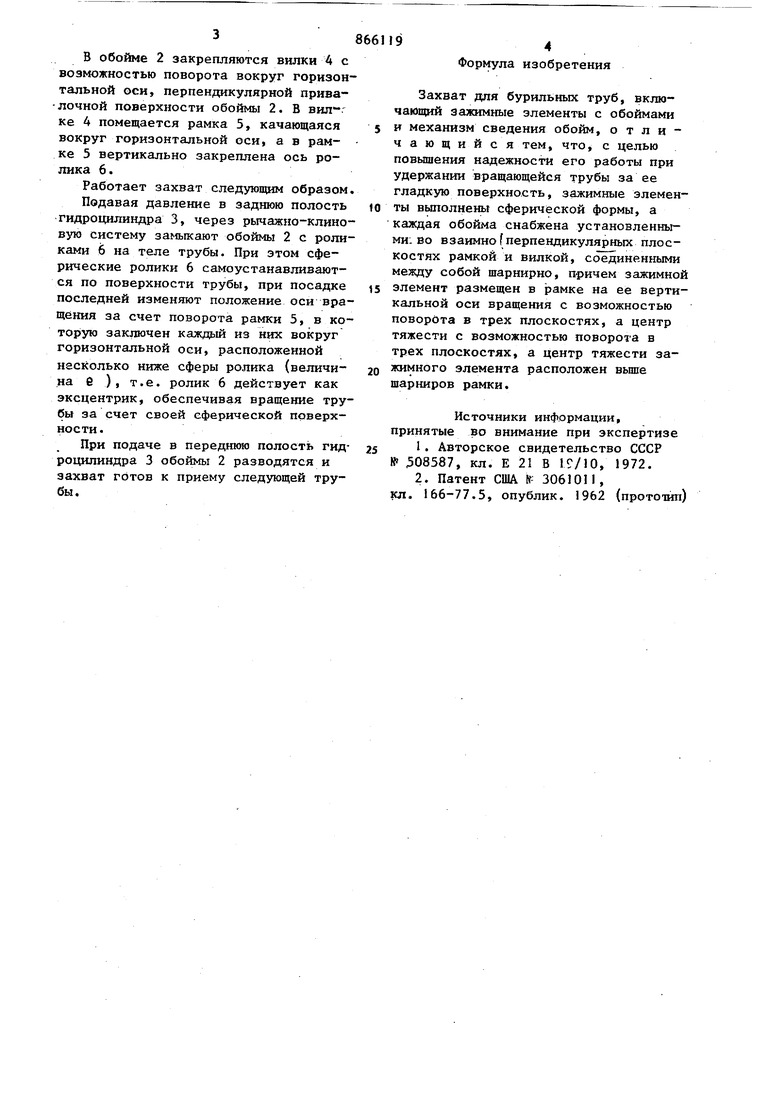
Изобретение относится к буровой технике и применимо в буровых устаг новках с автоматизацией или механиза цией спуска и подъена бурильных труб Известен трубодержатель, включающий плашки, поднимаемые тягами, и опорные элементы fl, Недостаток этого устройства - невозможность удержания труб при их вращении. Известен захват для бурильных тру включающий зажимные элементы в виде трех горизонтальных цилиндрических роликов и наклонно установленных роликов, обоймы и механизм сведения обойм в виде гидроцилиндров 2. Недостатком известного захвата является невозможность удержания гла кой поверхности трубы при ее вращени гак как ни вертикальные ролики, ни наклонные ролики не обеспечивают зажим трубы. Цель изобретения - повышение надежности работы захвата при удержаНИИ вращающейся трубы за ее гладкую поверхность. Поставленная цель достигается тем, что зажимные элементы выполнень сферической формы, а каждая обойма снабжена установленными во взаимно перпендикулярных плоскостях рамкой и вилкой, соединенными между собой шарнирно, причем зажимной элемент размещен в рамке на ее вертикальной оси вращения с возможностью поворота в трех плоскостях, а центр тяжести зажимного элемента расположен выше шарниров рамки. На фиг. I изображен предлагаемый захват, обпщй вид; на фиг. 2 - опора рамки; на фиг. 3 - вертикальный разрез опоры рамки. Захват состоит из корпуса 1, общего с рычажно-клиновой системой сведения обойм - 2, установленных в корпусе I, и механизма сведения обойм гидроцилиндра 3.
В обойме 2 закрепляются вилки 4 с возможностью поворота вокруг горизонтальной оси, перпендикулярной прива-лочной поверхности обоймы 2. В ке 4 помещается рамка 5, качающаяся вокруг горизонтальной оси, а в рамке 5 вертикально закреплена ось ролика 6.
Работает захват следующим образом.
Подавая давление в заднюю полость гидроцилиндра 3, через рычажио-клиновуто систему ,Iкaют обоймы 2 с роликами 6 на теле трубы. При этом сферические ролики 6 самоустанавливаются по поверхности трубы, при посадке последней изменяют положение оси вращения за счет поворота рамки 5, в которую заключен каждый из них вокруг горизонтальной оси, расположенной несколько ниже сферы ролика {величина е ), т.е. ролик 6 действует как эксцентрик, обеспечивая вращение трубы за счет своей сферической поверхности.
При подаче в переднюю полость гидроцилиндра 3 обоймы 2 разводятся и захват готов к приему следующей трубы.
Формула изобретения
Захват для бурильных труб, включающий зажимные элементы с обоймами и механизм сведения обойм, отличающийся тем, что, с целью повшиения надежности его работы при удержании вращающейся трубы за ее гладкую поверхность, зажимные злементы выполнеиьг сферич1еской формы, а каждая обойма снабжена установленными: во взаимно(перпендикулярных плоскостях рамкой и вилкой, соединенными между собой шарнирно, Причем зажимно элемент размещен в рамке на ее вертикальной оси вращения с возможностью поворота в трех плоскостях, а центр тяжести с возможностью поворота в трех плоскостях, а центр тяжести зажимного элемента расположен выше щарниров рамки.
Источники информации, принятые во внимание при экспертизе
1СЛ. 166-77.5, опублик. 1962 (прототип
г. д.
