Х54) РУЧКА-СЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручка-съемник для выдвижения и переноски блоков | 1981 |
|
SU999182A1 |
| Ручка-съемник для выдвижения и переноски блоков | 1988 |
|
SU1594717A1 |
| Устройство для установки и извлечения блоков радиоэлектронной аппаратуры | 1988 |
|
SU1610606A1 |
| Ручка-съемник для выдвижения и переноски блоков с Т-образными выступами | 1990 |
|
SU1765910A1 |
| Ручка-съемник для выдвижения и переноски блоков с Т-образными выступами | 1986 |
|
SU1370801A1 |
| Ручка-съемник для выдвижения и переноски радиоэлектронного модуля | 1986 |
|
SU1412017A1 |
| Радиоэлектронный блок | 1988 |
|
SU1540045A1 |
| ЭЛЕВАТОР ТРУБНЫЙ УНИВЕРСАЛЬНЫЙ ОДНОШТРОПНЫЙ ТИПА "ЭТУ" | 2021 |
|
RU2765001C1 |
| ЭЛЕВАТОР ТРУБНЫЙ УНИВЕРСАЛЬНЫЙ ОДНОШТРОПНЫЙ | 2022 |
|
RU2794051C1 |
| Ручка-съемник | 1983 |
|
SU1129752A1 |
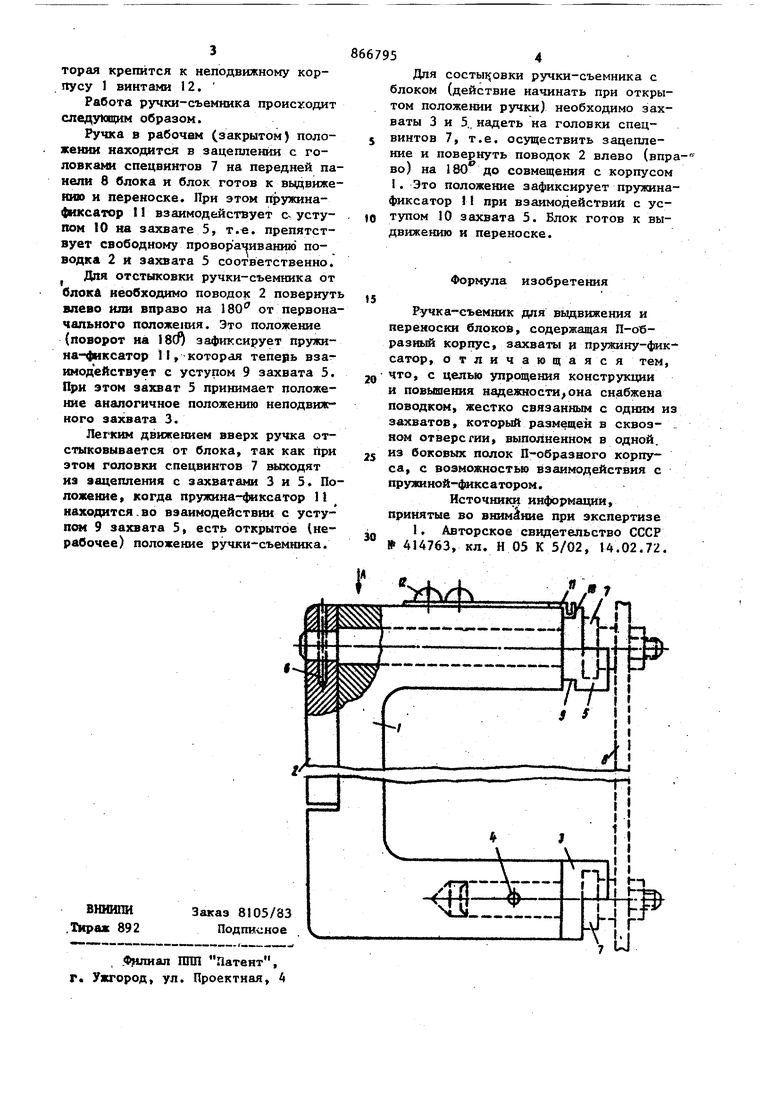
Изобретение относится к технологи оборудованию, используемому при эксплуатации приборов, в частнос ти для выдвижных блоков аппаратуры. Известна ручка-съемник, содержащая П-образнкй корпус, захваты и пру жину-фиксатор . Однако известная ручка-съемник . имеет большое количество деталей и сложную конструкцию, а также возможны перекосы между корпусом и размещенной в нем ручкой. Цель изобретения - упрощение конструкции и повышение надежности. Поставленная цель достигается тем что ручка-съемник,содержащая П-образный корпус, захваты и пружину-фик сатор, снабжена поводком, жестко связанным с одним из захватов, который размещен в сквозном отверстии, вьшолненном в одной из боковых полок П-образного корпуса, с возможностью взаимодействия с пружиной-фиксатором. На чертеже схематично изображено предлагаемое устройство. Ручка-съемник содержит П-образный несущий Еррпус 1, на боковых полках которого имеются глухое и сквозное отверстия. В корпусе выполнена выборка под поводок 2. В глухом отверстии закреплен захват 3 при помощи штифта 4. В сквозном отверстии размещен захват 5, который при помощи штифта 6 жестко соединен с поводком 2. Рабочие части захватов одинаковые и повторяют форму головки спецвинтов 7, которые находятся на панели 8 блока аппаратуры. Захват 5 имеет возможность вращаться вокруг собственной оси при помощи поводка 2. В данном случае поводок 2 выполнен заподлицо с корпусом I. Захват 5 имеет нижний уступ 9 и уступ 10. С этими уступами взаимодействует пружина-чфиксатор 11, которая крепится к неподвижному корпусу 1 винтами 12,
Работа ручки-съемника происходит следукяцим образом.
Ручка в рабочем (закрытом) положении находится в зацеплении с головками спецвинтов 7 на передней панели 8 блока и блок готов к ввдвижеии и переноске. При этом тгружинафиксатор II взаимодействует с уступом 10 на захвате 5, т.е. препятствует свободному проворачиванию поводка 2 и захвата 5 соответственно. Для отстыковки ручки-съемника от блоки необходимо поводок 2 повернут влево шш вправо на 180 от первоначального положе1шя. Это положение (поворот на I8Cf) зафиксирует пружина-фиксатор М, которая теперь взаимодействует с уступом 9 захвата 5. При этом захват 5 принимает положение аналогичное положению неподвижного захвата 3.
Легким движением вверх ручка отстыковывается от блока, так как при этом ГОЛОВ1Ш спецвинтов 7 шлсодят из зацепления с захватами 3 и 5. Положение, когда пружина-4«ксатор П находится.во взаимодействии с уступом 9 захвата 5, есть открытое (нерабочее) положение ручки съемника.
667954
Для состы $овки ручки-съемника с блоком (действие начинать при открытом положении ручки) необходимо захваты 3 и 5.. надеть на головки спец5 винтов 7, т.е. осуществить зацепление и повернуть поводок 2 влево (впра- во) на 180 до совмещения с корпусом I. Это положение зафиксирует пружинафиксатор II при взаимодействий с уступом 10 захвата 5. Блок готов к выдвижению и переноске.
Формула изобретения
Ручка-съемник для вьщвижения и переноски блоков, содержащая П-образиый корпус, захваты и пружину-фиксатор, о тлич ающаяс я тем, что, с целью упрощения конструкции и повышения надежности она снабжена поводком, жестко связанным с одним и захватов, который размещен в сквозном отверстии, выполненном в одной, из боковых полок П-образного корпуса, с возможностью взаимодействия с пружиной-фиксатором.
Источники информации, принятые во внимание при экспертизе
