/-(29 J 41
Ъ20
г /J

| название | год | авторы | номер документа |
|---|---|---|---|
| Ручка-съемник | 1987 |
|
SU1466018A1 |
| Устройство для установки и извлечения блоков радиоэлектронной аппаратуры | 1984 |
|
SU1210239A1 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| Радиоэлектронный блок | 1988 |
|
SU1540045A1 |
| Универсально-гибочный автомат для изготовления деталей малых серий | 1988 |
|
SU1637891A1 |
| Ручка-съемник для выдвижения и переноски блоков с Т-образными выступами | 1990 |
|
SU1765910A1 |
| Ручка-съемник | 1978 |
|
SU788458A1 |
| Радиоэлектронный блок | 1988 |
|
SU1638812A1 |
| Станция погрузки-разгрузки перемещаемого по пневмотрубопроводу контейнера с торцовыми крышками | 1987 |
|
SU1497133A1 |
| Демпфер для подающей каретки штампа | 2020 |
|
RU2756457C1 |

Изобретение относится к эксплуатации радиоэлектронной аппаратуры. Цель изобретения - повышение надежности в работе. Это достигается тем, что в устройстве, содержащем П-образный корпус 1 с рукояткой, опоры 9 с узлами их фиксации к корпусу прибора 53 и узлы фиксации блока, последние выполнены в виде рычажно-шатунного механизма с шарнирно установленными захватами 3 и средствами фиксации захватов. 14 ил.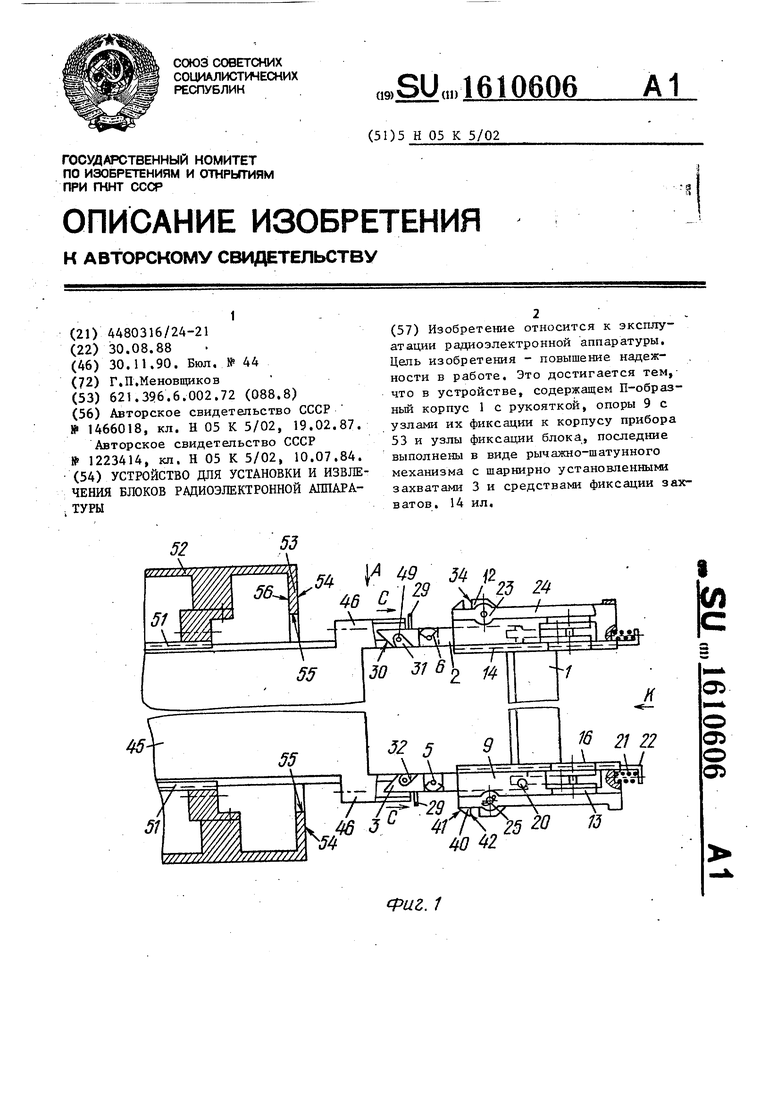
сриг. 1
Изобретение относится к эксплуатции радиоэлектронной аппаратуры.
Целью изобретения является првьш ние надежности в работе путем гарантированного взаимодействия захватов с арматурой блока при его установке и извлечении.
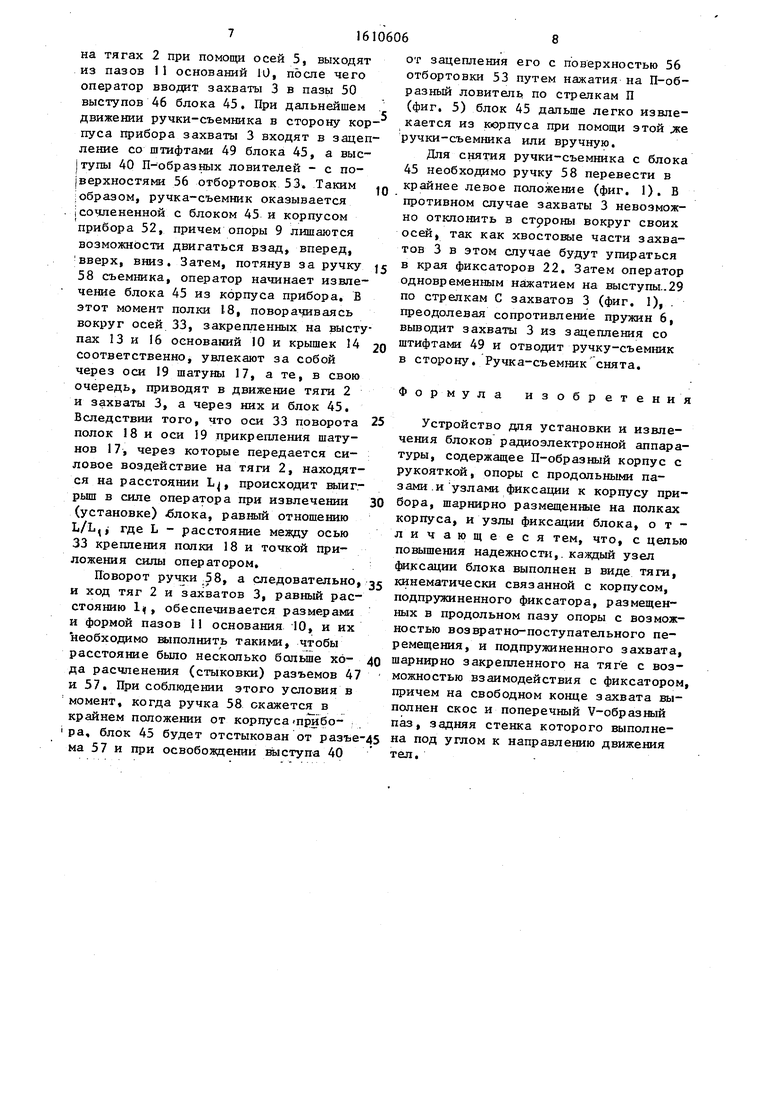
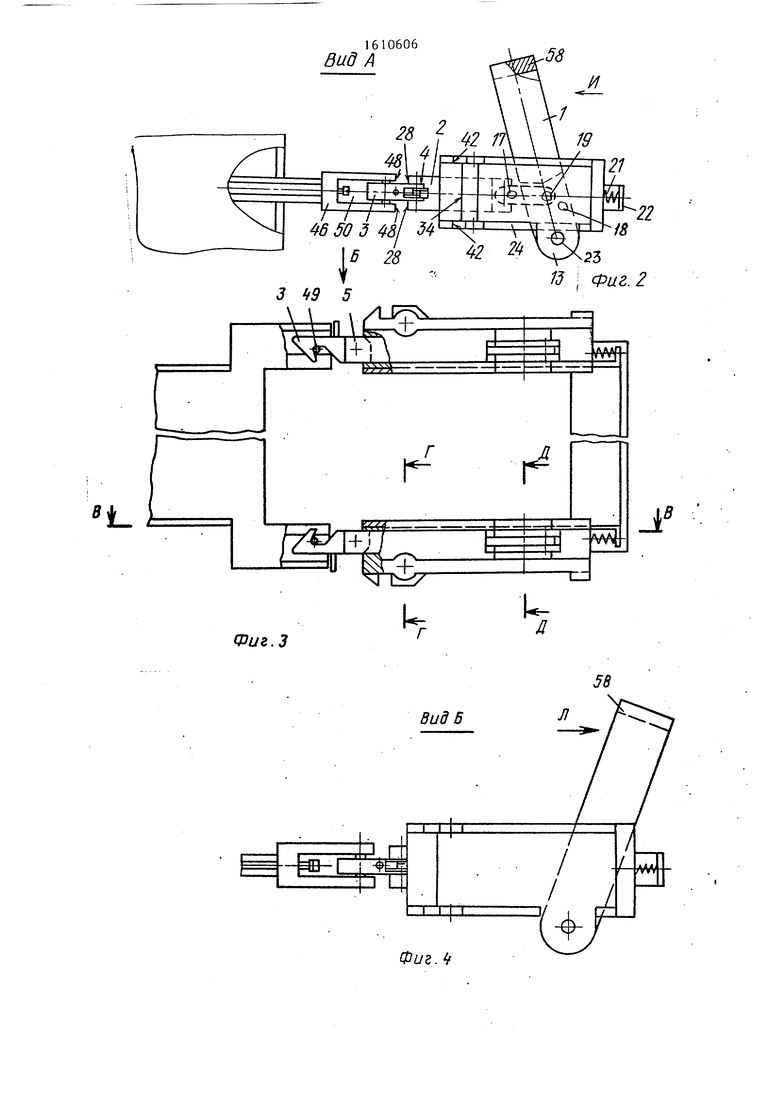
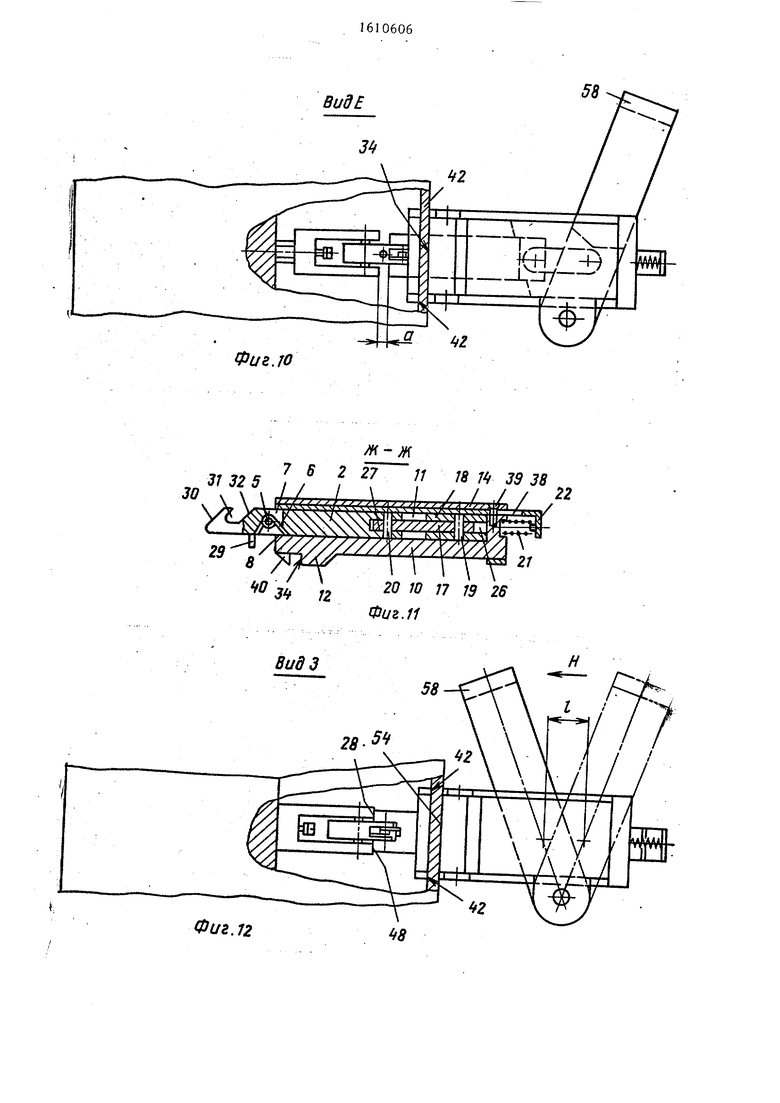
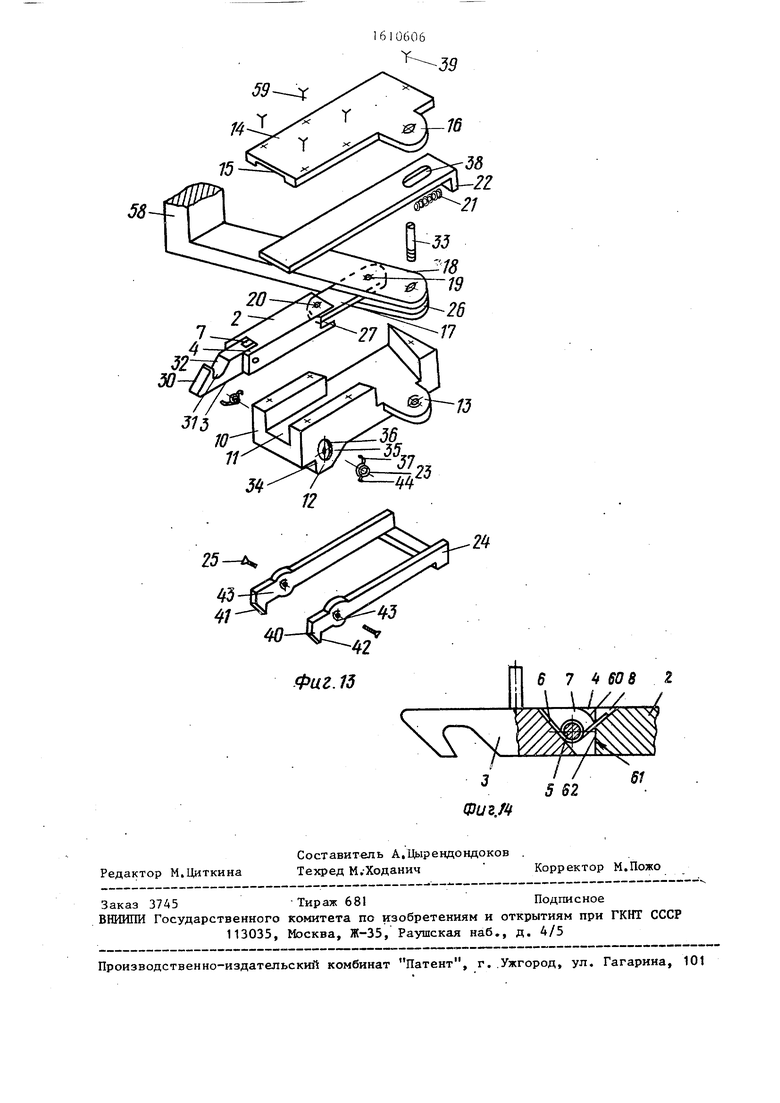
На фиг. 1 изображено устройство, сочлененное с блоком, установленным в корпусе .в первоначальный момент перед стыковкой его с разъемом прибора, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3.- устройство, сочлененное с блоком, установленным в корпус прибора в следующий момент перед .стыковкой его с разъемом прибора; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - устройство, сочлененное с блоком и с корпусрм прибора перед стыковкой с разъемом прибора;.на фиг, 6 - разрез В-В на фиг. 3; на фиг. 7 - устройство в момент стыковки блока с разъемом прибора; на фиг. 8 - разрез Г-Г на фиг. 3; на фиг. 9 - разрез Д-Д на фиг. 3; на фиг. 10 - вид Е на фиг. 5; на фиг.11 разрез Ж-Ж на фиг. 6; на фиг. 12 - вид 3 на фиг. 6; на фиг. 13 - детали устройства; на фиг. 14 - соединение захвата с тя1:ой.
Устройство для установки и извлечения блоков радиоэлектронной аппаратуры (ручка-съемшк) содержит П-обра ный корпус 1, тяги 2, захваты 3, установленные в пазах 4 тяг 2, прикрепленных к ним осями 5 подпружиненных пружинами 6, которые размещены в пазах 7 и 8 захватов и тяг соответственно, опоры 9, состоящие из оснований 10 с пазами 11, Bj,iCTynaMH 12 и 13 и крышек 14 с пазами 15 и выступа ми 16, шатуны 17, соединяющие кинема тически полки 18 П-образного корпуса 1 с тягами 2, расположенными в пазах 11 оснований 10, посредством осей 19 и 20, подпружиненные, пружинами 21 фиксаторы 22, размещенные в пазах 15 крышек 14, подпружиненные пружинами 23 П-образные ловители 24, закрепленные на выступах 12 оснований 10 при помощи осей.25. Для размещения концов шатунов 17 в полках 18 П-об- разного корпуса I и тягах 2 вскрыты пазы 26 и 27 соответственно. На тягах 2 имеются также опорные поверхности 28. Захваты 3 снабжены выступами 29, .скосами 30 и V-образными пазами 31, задняя стенка 32 которых
выполнена под углом к направлению перемещения тяг 2. Полки 18 П-образного корпуса 1 крепятся шарнирно при помощи осей 33 к выступами 13 и 16
оснований 10 и крьш1ек 14 соответственно. Кроме того, на выступах 12 оснований 10 предусмотрены опорные поверхности 34, углубления 35 дпя размещения пружин 23 и глухих отверстий 36 для фиксации одних концов 37 пружины 23. В фиксаторах 22 выполнены продолговатые отверстия 38, в которых размещаются ограничивающие элементы 39, например винты, обеспечивающие необходимый ход фиксаторов 22. П-образные ловители 24 снабжены выступами 4р со.скоростями 41 и опорными поверхностями 42 и отверстием 3 для фиксации других концов 44 пру- . жин 23. Устройство взаимодействует с . выдвижным блоком 45, снабженным выступами 46 и многоштырьковым разъемом 47. Выступы имеют опорные поверхнос- ти 48, штифты 49 и пазы 50. Блок 45 размещается в направляющих 51, установленных в корпусе прибора 52, который снабжен отбортовками 53 с поверхностями 54-56. На корпусе прибора размещен разъем 57. П-образный корпус 1 снабжен ручкой 58. Крышки 14 крепятся к основаниям 10, например, винтами 59.
22Устройство для установки и извлечения блоков радиоэлектронной аппаратуры работает следующим образом.
Сначала оператор вручную устанавливает блок 45 по направляющим 51 в Q корпус 52 таким образом,чтобы выступы 46 блока 45 остались вне корпуса 51. Затем берет ручку-съемник и устанавливает ручку 58 в крайнее положе- ни-е к корпусу (фиг. 1) по стрелке И. 5 этом захваты 3, кинематически связанные с ручкой 58 посредством полок 18, шатунов 17 и тяг 2 и соот- ветствующих осей 19, 20 и 5, выдвигаются из пазов П оснований 10 и полу- Q чают возможность поворачиваться вокруг осей 5 во внешние стороны ручки- съемника (фиг. 14), благодаря тому, что поверхности 60 хвостовых частей захватов 3 выполнены по необходимому 5 радиусу, а удерживаются захваты 3 в исходном положении при помощи пруя(ин 6 и взаимодействия острых кромок 61 хвостовых частей захватов 3 с соответствующими поверхностями 62 тяг 2,
После этого ручку-съемник надвигают на блок 45 по стрелке К так, чтобы захваты 3 вошли в пазы 50 выступов 4ё и CBOHNM скосами 30 вступили во взаимодействие со штифтами 49. Благодаря скосам 30 захваты 3 легко отводятся штифтами 49 в стороны и при прохождении их при. помощи пружин 6 входят пазами 31 со штифтами 49 в зацепление.
Затем ручку 58 устанавливают в ; крайнее положение от корпуса (фиг.З) по стрелке Л. При этом захваты 3 че-. рез взаимодействие тяг 2, шатунов 17, полок 18 и соответствующих осей 5, 20, 19 втягиваются в пазы И оснований 10 и лишаются возможности поворачиваться вокруг своих осей 5 -во внешние стороны, т.к. острые кромки хвос- .товых частей захватов 3 в этом случае будут упираться в края фиксатора 22, выполненного, например, в виде планки (фиг. 10), Ручка-съемник сочленена с
блоком 45.
Дальше ручку-съемник, сочлененную с блоком 45, передвигают по стрелке М (фиг. 5) до сочленения ее с корпусом прибора 52 при помощи П-образного ловителя 24, который удерживается в исходном положении пружинами 23. Во время движе;ния ручки-съемники по стрелке М в сторону корпуса прибора скосы 41 П-образного ловителя 24 вступают во взаимодействие с кромками поверхностей 54, благодаря чему захваты П-образного ловителя отводятся в стороны и при прохождении их при помощи пружин 23 входят в зацепление поверхностями 42 с поверхностями 56 отбортовок 53. Дальнейшее продвижение ручки-съемника по стрелке М невозможно, так как основание 10 опорными поверхностями 34 выступов 12 упрется в поверхности 54 отбортовок 53. Ручка-съемник сочленена с корпусом прибора 52 и ее опоры 9 в этом положении не могут передвигаться ни взад, ни вперед, ни вверх, ни вниз. Затем .нажимая на-ручку 58 (фиг. 8, 7, 9)
по стрелке Н. оператор начинает со- стыковку разъема 47 блока 45 с разъемом 57, установленным на корпусе при- .бора 52. При этом (фиг. 9) через взаимодействие поток 18, шатунов 17 и со ответствующих осей 19, 20 тяги 2 нач . нают передвигаться в пазах 11 основания 10 также по стрелке Н и, выбрав свободный ход а, своими опорными по10
-- 20
25
0606
верхностями 28 упрутся в опорные поверхности 48 выступов 46 и приведут ; в движение блок 45, в результате чего произойдет стыковка разъемов 47 и 57. В это время шарнирно соединенные с тягами 2 посредством осей 5 захваты 3 вьшдут из пазов 11 оснований 10 и получат возможность поворачиваться вокруг осей 5, и до того, как встретятся опорные поверхности 28 и 48 . тяг 2 и выступов 45 соответственно (во время свободного хода), стенки пазов 32 захватов 3, придя во взаимодействие со штифтами 49, отклонят захваты 3 в стороны и выведут их пазы 31 из зацепления со штифтами 49. Ручка-съемник расчленена с блоком 45.
Для того, чтобы ручку-съемник снять с блока 45 и чтобы захваты 3 вновь не зашли в зацепление пазами 13 со штифтами 49 во время обратного движения, необходимо нажать на фиксаторы 22, подпружиненные пружинами 21 в направлении стрелок Р (фиг. 7). При этом фиксаторы сврими концами 63 упрутся в хвостовые части захватов 3 (на фиг. 7 это показано штрихпунктир- :ными линиями) и не позволяет им повернуться в исходное положение под действием пружин 6. Одновременно с этим необходимо отклонить П-образные ловители, преодолевая сопротивление пружин 23 в направлении стрелок П (фиг. 7), и вывести из зацеппения их опорные поверхности 42 с поверхностями 56 отбортовок 53 корпуса 52 прибора, после чего начать снимать ручку- съемник с блока 45 и корпуса прибора 52 одновременно. При этом, как только пазы 31 захватов 3 выйдут за пределы возможного повторного захвата штифтов 49, необходимого перестать на- шшать на фиксаторы 22. Они под действием пружин 21 вернутся в исходное пoлoжeшie и прекратят удерживать зах- ваты 3 в отклоненном состоянии, в результате чего захваты 3 под действием пружин 6 также вернутся в исходное положение. В противном случае отклоненные захваты 3 уперлись бы в поверхности 55 отбортовок 53 и не позволили бы снять ручку-съемник с корпуса прибора. После этого ручка-съемник легко снимается -окончательно.
Для извлечения блока 45 из корпуса прибора 52 ручку 58 ручки-съемника устанавливают в положение по фиг. 7, 8. При этом захваты 3, закрепленные
30
35
40
45
50
55
на тягах 2 при помощи осей 5, выходят из пазов 11 оснований 1U, после чего оператор вводит захваты 3 в пазы 50 выступов 46 блока 45, При дштьнейшем
движении ручки-съемника в сторону корпуса прибора захваты 3 входят в зацепление со штифтами 49 блока 45, а выс- {тупы 40 П-образных ловителей - с по- |верхностями 56 отбортовок 53. Таким :образом, ручка-съемник оказывается iсочлененной с блоком 45 и корпусом прибора 52, причем опоры 9 лишаются возможности двигаться взад, вперед, -вверх, вниз. Затем, потянув за ручку 58 съемника, оператор начинает извлечение блока 45 из корпуса прибора, В этот момент полки 18, поворачиваясь вокруг осей 33, закрепленных на выступах 13 и 16 оснований 10 и крышек 14 соответственно, увлекают за собой через оси 19 шатуны 17, а те, в свою очередь, приводят в движение тяги 2 и захваты 3, а через них и блок 45, Вследствии того, что оси 33 поворота полок 18 и оси 19 прикрепления шатунов 17, через которые передается силовое воздействие на тяги 2, находятся на расстоянии L, происходит выиг- рьш1 в силе оператора при извлечении (установке) лока, равный отношению L/b,ji где L - расстояние между осью 33 крепления полки 18 и точкой приложения силы оператором.
от зацепления его с поверхностью 56 отбортовки 53 путем нажатия на П-об- разный ловитель по стрелкам П (фиг, 5) блок 45 дальше легко извле- кается из корпуса при помощи этой е ручки-съемника или вручную.
Для снятия ручки-съемника с блока 45 необходимо ручку 58 перевести в Q крайнее левое положение (фиг, 1). В противном случае захваты 3 невозможно отклонить в стрроны вокруг своих осей, так как хвостовые части захватов 3 в этом случае будут упираться ,5 в края фиксаторов 22, Затем оператор одновременным нажатием на выступы..29 по стрелкам С захватов 3 (фиг. 1), . преодолевая сопротивление пружин 6, выводит захваты 3 из зацепления со 20 штифтами 49 и отводит ручку-съемник в сторону. Ручка-съемник снята.
Формула изобретени
25
30
Устройство для установки и извлечения блоков радиоэлектронной аппаратуры, содержащее П-образный корпус с рукояткой, опоры с продольными пазами, и узлами фиксации к корпусу прибора, шарнирно размещенные на полках корпуса, и узлы фиксации блока, отличающееся тем, что, с целью повышения надежности,, каждый узел
Пг,пог,«-п- - - -фиксации блока выполнен в виде тяги.
Поворот ручки ,58, а следовательно, 35 кинематически связанной с корпусов и ход тяг 2 и захватов 3, равный рас- подпружиненного фиксатора, стоянию 1,, обеспечивается размераминых в продольном пазу с возмож обхо мПшо « «- «-ю возвратно-nocTynaTLbLro пе- неооходимо выполнить такими, чтобы
расстояние было несколько больше х6- 40 да расчленения (стыковки) разъемов 47 и 57, При соблюдении этого условия в момент, когда ручка 58 окажется в крайнем положении от корпуса п бора.
ремещения, и подпружиненного захвата, шарнирно закрепленного на тяге с возможностью взаимодействия с фиксатором, причем на свободном конце захвата выполнен скос и поперечный V-образный паз, задняя стенка которого выполнебпок- Лл .п, --г-,, сццхил i;ieHKa которого выполне
блок 4з будет отстыкован от разъе-45 на под углом к направлению движения
/ и ППИ Ol Hnfimimetrt.., п.« АЛf J a ar n.
ма 57 И При освобождении вь1ступа 40
тел.
06068
от зацепления его с поверхностью 56 отбортовки 53 путем нажатия на П-об- разный ловитель по стрелкам П (фиг, 5) блок 45 дальше легко извле- кается из корпуса при помощи этой е ручки-съемника или вручную.
Для снятия ручки-съемника с блока 45 необходимо ручку 58 перевести в Q крайнее левое положение (фиг, 1). В противном случае захваты 3 невозможно отклонить в стрроны вокруг своих осей, так как хвостовые части захватов 3 в этом случае будут упираться ,5 в края фиксаторов 22, Затем оператор одновременным нажатием на выступы..29 по стрелкам С захватов 3 (фиг. 1), . преодолевая сопротивление пружин 6, выводит захваты 3 из зацепления со 0 штифтами 49 и отводит ручку-съемник в сторону. Ручка-съемник снята.
Формула изобретени
«-ю возвратно-nocTynaTLbLro пе-
ремещения, и подпружиненного захвата, шарнирно закрепленного на тяге с возможностью взаимодействия с фиксатором причем на свободном конце захвата выполнен скос и поперечный V-образный паз, задняя стенка которого выполне-, сццхил i;ieHKa которого выполне
на под углом к направлению движения
на по
тел.
1610606
Вид А
Фиг.З
И
Вид 6
Л
Фиг.
Фиг. 5
В- в
У3 / / 7
Фиг, 6
Т/
///////
т.
16 33 74 26 15
IIIА i J и 11 г А у Jl
13
Ю 77
Фиг. 7
Г
Фиг.Э
ВидЕ
Фиг JO
J4, J2 7 J9 26
Фиг.11
ВидЗ
u
- /
г
Фиг. 15
6 7 608 I ///..
5/
| Ручка-съемник | 1987 |
|
SU1466018A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для установки и извлечения печатных плат | 1984 |
|
SU1223414A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
